|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
This functor gives a parabolic profile for a given point x as it computes the distance between x and the axis. More...
#include <latticeFrameChangeF3D.h>
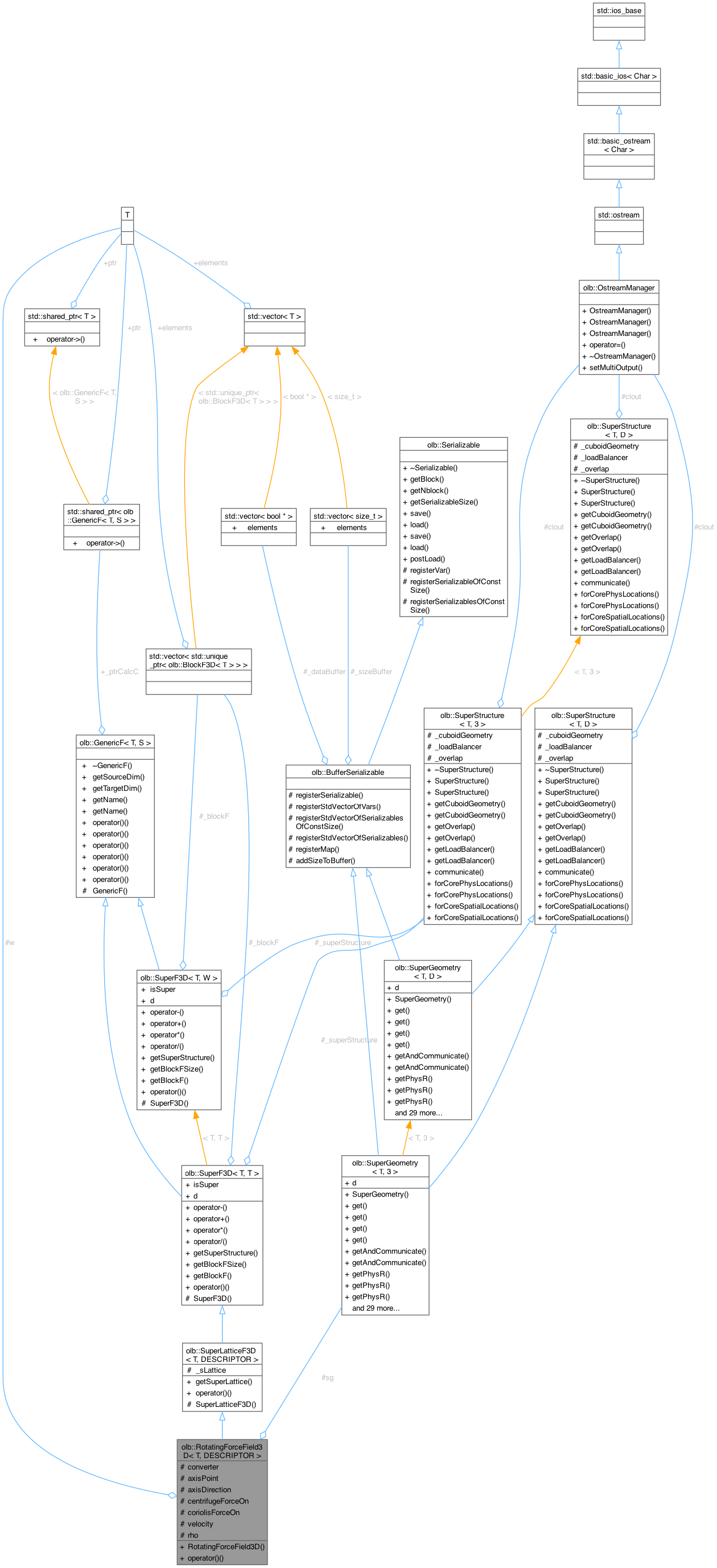
 Inheritance diagram for olb::RotatingForceField3D< T, DESCRIPTOR >: Collaboration diagram for olb::RotatingForceField3D< T, DESCRIPTOR >:
Inheritance diagram for olb::RotatingForceField3D< T, DESCRIPTOR >: Collaboration diagram for olb::RotatingForceField3D< T, DESCRIPTOR >:Public Member Functions | |
| RotatingForceField3D (SuperLattice< T, DESCRIPTOR > &sLattice_, SuperGeometry< T, 3 > &superGeometry_, const UnitConverter< T, DESCRIPTOR > &converter_, std::vector< T > axisPoint_, std::vector< T > axisDirection_, T w_, bool centrifugeForceOn_=true, bool coriolisForceOn_=true) | |
| bool | operator() (T output[], const int x[]) override |
| Public Member Functions inherited from olb::SuperLatticeF3D< T, DESCRIPTOR > | |
| SuperLattice< T, DESCRIPTOR > & | getSuperLattice () |
| bool | operator() (T output[], const int input[]) |
| Public Member Functions inherited from olb::SuperF3D< T, T > | |
| SuperF3D< T, T > & | operator- (SuperF3D< T, T > &rhs) |
| SuperF3D< T, T > & | operator+ (SuperF3D< T, T > &rhs) |
| SuperF3D< T, T > & | operator* (SuperF3D< T, T > &rhs) |
| SuperF3D< T, T > & | operator/ (SuperF3D< T, T > &rhs) |
| SuperStructure< T, 3 > & | getSuperStructure () |
| int | getBlockFSize () const |
| BlockF3D< T > & | getBlockF (int iCloc) |
| bool | operator() (T output[], const int input[]) |
| Public Member Functions inherited from olb::GenericF< T, S > | |
| virtual | ~GenericF ()=default |
| int | getSourceDim () const |
| read only access to member variable _m | |
| int | getTargetDim () const |
| read only access to member variable _n | |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
| virtual bool | operator() (T output[], const S input[])=0 |
| has to be implemented for 'every' derived class | |
| bool | operator() (T output[]) |
| wrapper that call the pure virtual operator() (T output[], const S input[]) from above | |
| bool | operator() (T output[], S input0) |
| bool | operator() (T output[], S input0, S input1) |
| bool | operator() (T output[], S input0, S input1, S input2) |
| bool | operator() (T output[], S input0, S input1, S input2, S input3) |
Protected Attributes | |
| SuperGeometry< T, 3 > & | sg |
| const UnitConverter< T, DESCRIPTOR > & | converter |
| std::vector< T > | axisPoint |
| std::vector< T > | axisDirection |
| T | w |
| bool | centrifugeForceOn |
| bool | coriolisForceOn |
| SuperLatticePhysVelocity3D< T, DESCRIPTOR > | velocity |
| SuperLatticeDensity3D< T, DESCRIPTOR > | rho |
| Protected Attributes inherited from olb::SuperLatticeF3D< T, DESCRIPTOR > | |
| SuperLattice< T, DESCRIPTOR > & | _sLattice |
| Protected Attributes inherited from olb::SuperF3D< T, T > | |
| SuperStructure< T, 3 > & | _superStructure |
| std::vector< std::unique_ptr< BlockF3D< T > > > | _blockF |
| Super functors may consist of several BlockF3D<W> derived functors. | |
Additional Inherited Members | |
| Public Types inherited from olb::SuperLatticeF3D< T, DESCRIPTOR > | |
| using | identity_functor_type = SuperLatticeIdentity3D<T,DESCRIPTOR> |
| Public Types inherited from olb::SuperF3D< T, T > | |
| using | identity_functor_type |
| Public Types inherited from olb::GenericF< T, S > | |
| using | targetType = T |
| using | sourceType = S |
| Public Attributes inherited from olb::GenericF< T, S > | |
| std::shared_ptr< GenericF< T, S > > | _ptrCalcC |
| memory management, frees resouces (calcClass) | |
| Static Public Attributes inherited from olb::SuperF3D< T, T > | |
| static constexpr bool | isSuper |
| static constexpr unsigned | d |
| Protected Member Functions inherited from olb::SuperLatticeF3D< T, DESCRIPTOR > | |
| SuperLatticeF3D (SuperLattice< T, DESCRIPTOR > &superLattice, int targetDim) | |
| Protected Member Functions inherited from olb::SuperF3D< T, T > | |
| SuperF3D (SuperStructure< T, 3 > &superStructure, int targetDim) | |
| Protected Member Functions inherited from olb::GenericF< T, S > | |
| GenericF (int targetDim, int sourceDim) | |
This functor gives a parabolic profile for a given point x as it computes the distance between x and the axis.
The forces set are the fake forces caused by a non-Galilean frame, here rotating around an axis with a pulse w. There are:
The boolean terms enable to choose having centrifugue or coriolis forces too or not. Functor for the rotation of forces.
Definition at line 66 of file latticeFrameChangeF3D.h.
| olb::RotatingForceField3D< T, DESCRIPTOR >::RotatingForceField3D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice_, |
| SuperGeometry< T, 3 > & | superGeometry_, | ||
| const UnitConverter< T, DESCRIPTOR > & | converter_, | ||
| std::vector< T > | axisPoint_, | ||
| std::vector< T > | axisDirection_, | ||
| T | w_, | ||
| bool | centrifugeForceOn_ = true, | ||
| bool | coriolisForceOn_ = true ) |
Definition at line 41 of file latticeFrameChangeF3D.hh.
References olb::GenericF< T, S >::getName().
Here is the call graph for this function:
|
override |
Definition at line 56 of file latticeFrameChangeF3D.hh.
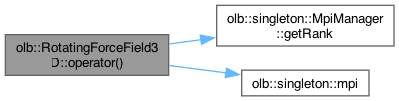
References olb::singleton::MpiManager::getRank(), and olb::singleton::mpi().
Here is the call graph for this function:
|
protected |
Definition at line 71 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 70 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 73 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 69 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 74 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 76 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 68 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 75 of file latticeFrameChangeF3D.h.
|
protected |
Definition at line 72 of file latticeFrameChangeF3D.h.