|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
This file contains two different classes of functors, in the FIRST part. More...
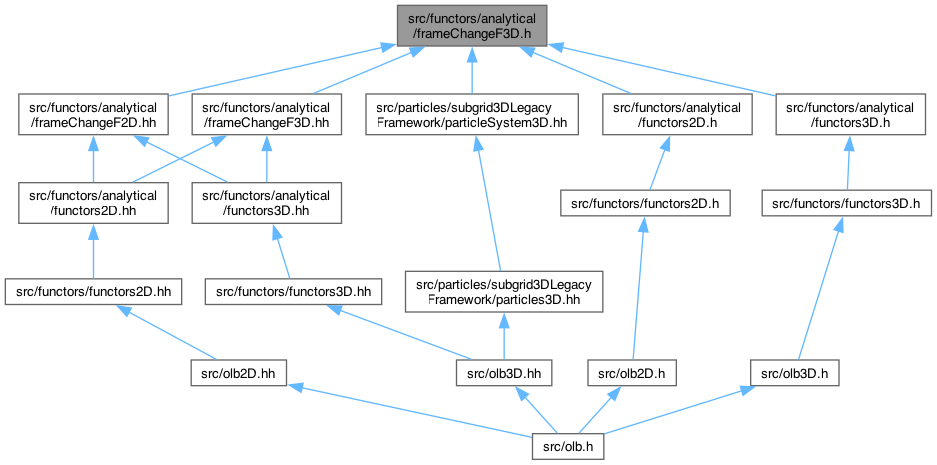
 Include dependency graph for frameChangeF3D.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for frameChangeF3D.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | olb::RotatingLinear3D< T > |
| This functor gives a linar profile for a given point x as it computes the distance between x and the axis. More... | |
| class | olb::RotatingLinearAnnulus3D< T > |
| This functor gives a linar profile in an annulus for a given point x between the inner and outer radius as it computes the distance between x and the inner and outer radius. More... | |
| class | olb::RotatingQuadratic1D< T > |
| This functor gives a parabolic profile for a given point x as it computes the distance between x and the axis. More... | |
| class | olb::CirclePowerLaw3D< T > |
| This functor returns a quadratic Poiseuille profile for use with a pipe with util::round cross-section. More... | |
| class | olb::CirclePowerLawTurbulent3D< T > |
| Velocity profile for util::round pipes and turbulent flows: u(r)=u_max*(1-r/R)^(1/n) The exponent n can be calculated by n = 1.03 * ln(Re) - 3.6 n=7 is used for many flow applications. More... | |
| class | olb::CirclePoiseuille3D< T > |
| Velocity profile for util::round pipes and a laminar flow of a Newtonian fluid: u(r)=u_max*(1-(r/R)^2) More... | |
| class | olb::CirclePoiseuilleStrainRate3D< T, DESCRIPTOR > |
| Strain rate for util::round pipes and laminar flow of a Newtonian fluid. More... | |
| class | olb::RectanglePoiseuille3D< T > |
| This functor returns a Poiseuille profile for use with a pipe with square shaped cross-section. More... | |
| class | olb::RectangleTrigonometricPoiseuille3D< T > |
| class | olb::EllipticPoiseuille3D< T > |
| This functor returns a quadratic Poiseuille profile for use with a pipe with elliptic cross-section. More... | |
| class | olb::AnalyticalPorousVelocity3D< T > |
| Analytical solution of porous media channel flow with low Reynolds number See Spaid and Phelan (doi:10.1063/1.869392) More... | |
| class | olb::AngleBetweenVectors3D< T, S > |
| This class calculates the angle alpha between vector _referenceVector and any other vector x. More... | |
| class | olb::RotationRoundAxis3D< T, S > |
| This class saves coordinates of the resulting point after rotation in the output field. More... | |
| class | olb::CylinderToCartesian3D< T, S > |
| This class converts cylindrical of point x (x[0] = radius, x[1] = phi, x[2] = z) to Cartesian coordinates (wrote into output field). More... | |
| class | olb::CartesianToCylinder3D< T, S > |
| This class converts Cartesian coordinates of point x to cylindrical coordinates wrote into output field (output[0] = radius, output[1] = phi, output[2] = z). More... | |
| class | olb::SphericalToCartesian3D< T, S > |
| This class converts spherical coordinates of point x (x[0] = radius, x[1] = phi, x[2] = theta) to Cartesian coordinates wrote into output field. More... | |
| class | olb::CartesianToSpherical3D< T, S > |
| This class converts Cartesian coordinates of point x to spherical coordinates wrote into output field (output[0] = radius, output[1] = phi, output[2] = theta). More... | |
| class | olb::MagneticForceFromCylinder3D< T, S > |
| Magnetic field that creates magnetization in wire has to be orthogonal to the wire. More... | |
| class | olb::MagneticFieldFromCylinder3D< T, S > |
Namespaces | |
| namespace | olb |
| Top level namespace for all of OpenLB. | |
This file contains two different classes of functors, in the FIRST part.
The ones in the SECOND part are useful to set Poiseuille velocity profiles on
Definition in file frameChangeF3D.h.