|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
#include <hertzMindlinDeresiewicz3D.h>
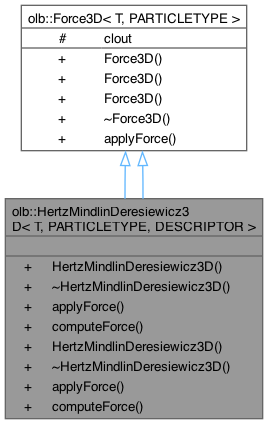
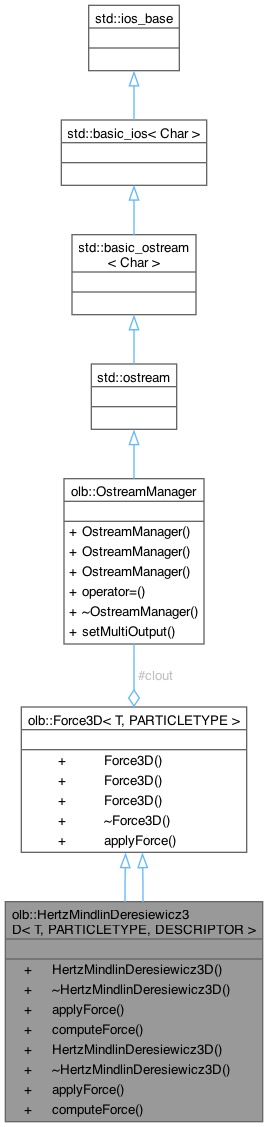
 Inheritance diagram for olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >: Collaboration diagram for olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >:
Inheritance diagram for olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >: Collaboration diagram for olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >:Public Member Functions | |
| HertzMindlinDeresiewicz3D (T G1, T G2, T v1, T v2, T scale1=T(1.), T scale2=T(1.), bool validationKruggelEmden=false) | |
| ~HertzMindlinDeresiewicz3D () override | |
| void | applyForce (typename std::deque< PARTICLETYPE< T > >::iterator p, int pInt, ParticleSystem3D< T, PARTICLETYPE > &pSys) override |
| void | computeForce (typename std::deque< PARTICLETYPE< T > >::iterator p, int pInt, ParticleSystem3D< T, PARTICLETYPE > &pSys, T force[3]) |
| HertzMindlinDeresiewicz3D (T G1, T G2, T v1, T v2, T scale1=T(1.), T scale2=T(1.), bool validationKruggelEmden=false) | |
| ~HertzMindlinDeresiewicz3D () override | |
| void | applyForce (typename std::deque< PARTICLETYPE< T > >::iterator p, int pInt, ParticleSystem3D< T, PARTICLETYPE > &pSys) override |
| void | computeForce (typename std::deque< PARTICLETYPE< T > >::iterator p, int pInt, ParticleSystem3D< T, PARTICLETYPE > &pSys, T force[3]) |
| Public Member Functions inherited from olb::Force3D< T, PARTICLETYPE > | |
| Force3D () | |
| Force3D (Force3D< T, PARTICLETYPE > &) | |
| Force3D (const Force3D< T, PARTICLETYPE > &) | |
| virtual | ~Force3D () |
Additional Inherited Members | |
| Protected Attributes inherited from olb::Force3D< T, PARTICLETYPE > | |
| OstreamManager | clout |
Definition at line 47 of file hertzMindlinDeresiewicz3D.h.
| olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >::HertzMindlinDeresiewicz3D | ( | T | G1, |
| T | G2, | ||
| T | v1, | ||
| T | v2, | ||
| T | scale1 = T(1.), | ||
| T | scale2 = T(1.), | ||
| bool | validationKruggelEmden = false ) |
Definition at line 38 of file hertzMindlinDeresiewicz3D.hh.
References olb::util::pow().
Here is the call graph for this function:
|
inlineoverride |
Definition at line 52 of file hertzMindlinDeresiewicz3D.h.
| olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >::HertzMindlinDeresiewicz3D | ( | T | G1, |
| T | G2, | ||
| T | v1, | ||
| T | v2, | ||
| T | scale1 = T(1.), | ||
| T | scale2 = T(1.), | ||
| bool | validationKruggelEmden = false ) |
|
inlineoverride |
Definition at line 54 of file hertzMindlinDeresiewiczForCombWithCollisionModel3D.h.
|
overridevirtual |
Implements olb::Force3D< T, PARTICLETYPE >.
Definition at line 57 of file hertzMindlinDeresiewicz3D.hh.
|
overridevirtual |
Implements olb::Force3D< T, PARTICLETYPE >.
| void olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >::computeForce | ( | typename std::deque< PARTICLETYPE< T > >::iterator | p, |
| int | pInt, | ||
| ParticleSystem3D< T, PARTICLETYPE > & | pSys, | ||
| T | force[3] ) |
Definition at line 67 of file hertzMindlinDeresiewicz3D.hh.
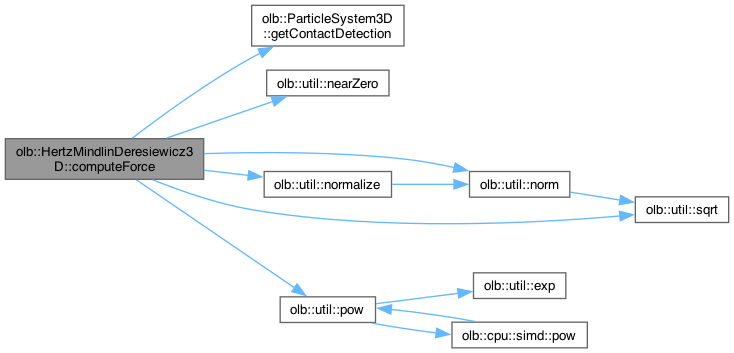
References olb::ParticleSystem3D< T, PARTICLETYPE >::getContactDetection(), olb::util::nearZero(), olb::util::norm(), olb::util::normalize(), olb::util::pow(), and olb::util::sqrt().
Here is the call graph for this function:| void olb::HertzMindlinDeresiewicz3D< T, PARTICLETYPE, DESCRIPTOR >::computeForce | ( | typename std::deque< PARTICLETYPE< T > >::iterator | p, |
| int | pInt, | ||
| ParticleSystem3D< T, PARTICLETYPE > & | pSys, | ||
| T | force[3] ) |