|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
#include <reductionF3D.h>
 Inheritance diagram for olb::SmoothBlockIndicator3D< T, DESCRIPTOR >: Collaboration diagram for olb::SmoothBlockIndicator3D< T, DESCRIPTOR >:
Inheritance diagram for olb::SmoothBlockIndicator3D< T, DESCRIPTOR >: Collaboration diagram for olb::SmoothBlockIndicator3D< T, DESCRIPTOR >:Public Member Functions | |
| SmoothBlockIndicator3D (IndicatorF3D< T > &f, T h, T eps, T sigma) | |
| Public Member Functions inherited from olb::BlockDataF3D< T, T > | |
| BlockDataF3D (BlockData< 3, T, T > &blockData) | |
| Constructor. | |
| BlockDataF3D (BlockF3D< T > &f) | |
| to store functor data, constuctor creates _blockData with functor data | |
| BlockData< 3, T, T > & | getBlockData () |
| returns _blockData | |
| bool | operator() (T output[], const int input[]) override |
| access to _blockData via its get() | |
| Public Member Functions inherited from olb::BlockF3D< T > | |
| ~BlockF3D () override | |
| virtual destructor for defined behaviour | |
| virtual BlockStructureD< 3 > & | getBlockStructure () const |
| BlockF3D< T > & | operator- (BlockF3D< T > &rhs) |
| BlockF3D< T > & | operator+ (BlockF3D< T > &rhs) |
| BlockF3D< T > & | operator* (BlockF3D< T > &rhs) |
| BlockF3D< T > & | operator/ (BlockF3D< T > &rhs) |
| Public Member Functions inherited from olb::GenericF< T, int > | |
| virtual | ~GenericF ()=default |
| int | getSourceDim () const |
| read only access to member variable _m | |
| int | getTargetDim () const |
| read only access to member variable _n | |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
| virtual bool | operator() (T output[], const int input[])=0 |
| has to be implemented for 'every' derived class | |
| bool | operator() (T output[]) |
| wrapper that call the pure virtual operator() (T output[], const S input[]) from above | |
| bool | operator() (T output[], int input0) |
| bool | operator() (T output[], int input0, int input1) |
| bool | operator() (T output[], int input0, int input1, int input2) |
| bool | operator() (T output[], int input0, int input1, int input2, int input3) |
Protected Attributes | |
| const T | _h |
| Lattice spacing of the particle grid. | |
| const T | _sigma |
| Important parameter for the Gaussian point spread Function (standard deviations) | |
| const int | _eps |
| Size (always a multiple of 2) of the epsilon layer eps_phys = _eps * _h. | |
| const int | _wa |
| size of the matrix of weight coefficients (from 3D Gaussian Function) _wa x _wa x _wa | |
| IndicatorF3D< T > & | _f |
| _f holds the geometry | |
| Protected Attributes inherited from olb::BlockDataF3D< T, T > | |
| std::unique_ptr< BlockData< 3, T, T > > | _blockDataStorage |
| BlockData< 3, T, T > & | _blockData |
| Protected Attributes inherited from olb::BlockF3D< T > | |
| BlockStructureD< 3 > & | _blockStructure |
Additional Inherited Members | |
| Public Types inherited from olb::GenericF< T, int > | |
| using | targetType |
| using | sourceType |
| Public Attributes inherited from olb::GenericF< T, int > | |
| std::shared_ptr< GenericF< T, int > > | _ptrCalcC |
| memory management, frees resouces (calcClass) | |
| Protected Member Functions inherited from olb::BlockDataF3D< T, T > | |
| BlockDataF3D (int nx, int ny, int nz, int size=1) | |
| Protected Member Functions inherited from olb::BlockF3D< T > | |
| BlockF3D (BlockStructureD< 3 > &blockStructure, int targetDim) | |
| Protected Member Functions inherited from olb::GenericF< T, int > | |
| GenericF (int targetDim, int sourceDim) | |
Definition at line 82 of file reductionF3D.h.
| olb::SmoothBlockIndicator3D< T, DESCRIPTOR >::SmoothBlockIndicator3D | ( | IndicatorF3D< T > & | f, |
| T | h, | ||
| T | eps, | ||
| T | sigma ) |
Definition at line 96 of file reductionF3D.hh.
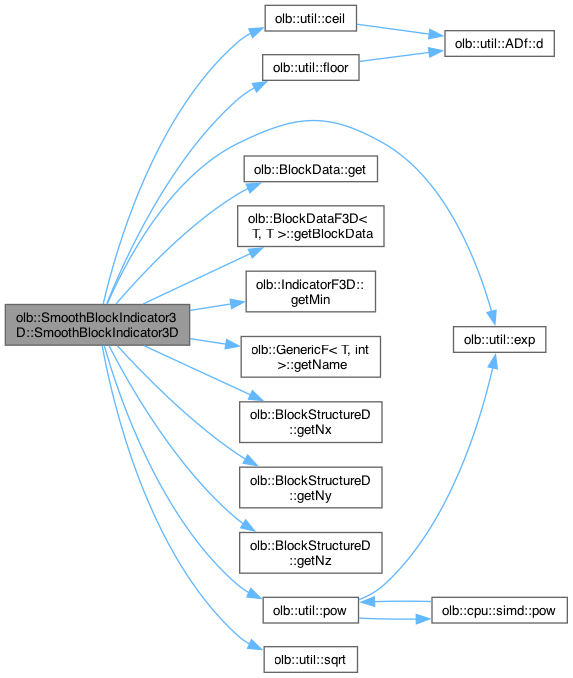
References olb::SmoothBlockIndicator3D< T, DESCRIPTOR >::_f, olb::SmoothBlockIndicator3D< T, DESCRIPTOR >::_h, olb::SmoothBlockIndicator3D< T, DESCRIPTOR >::_sigma, olb::SmoothBlockIndicator3D< T, DESCRIPTOR >::_wa, olb::util::ceil(), olb::util::exp(), olb::util::floor(), olb::BlockData< D, T, U >::get(), olb::BlockDataF3D< T, T >::getBlockData(), olb::IndicatorF3D< S >::getMin(), olb::GenericF< T, int >::getName(), olb::BlockStructureD< D >::getNx(), olb::BlockStructureD< D >::getNy(), olb::BlockStructureD< D >::getNz(), M_PI, olb::util::pow(), and olb::util::sqrt().
Here is the call graph for this function:
|
protected |
Size (always a multiple of 2) of the epsilon layer eps_phys = _eps * _h.
Definition at line 97 of file reductionF3D.h.
|
protected |
_f holds the geometry
Definition at line 101 of file reductionF3D.h.
|
protected |
Lattice spacing of the particle grid.
Definition at line 93 of file reductionF3D.h.
|
protected |
Important parameter for the Gaussian point spread Function (standard deviations)
Definition at line 95 of file reductionF3D.h.
|
protected |
size of the matrix of weight coefficients (from 3D Gaussian Function) _wa x _wa x _wa
Definition at line 99 of file reductionF3D.h.