|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
Velocity profile for util::round pipes and a laminar flow of a Newtonian fluid: u(r)=u_max*(1-(r/R)^2) More...
#include <frameChangeF3D.h>
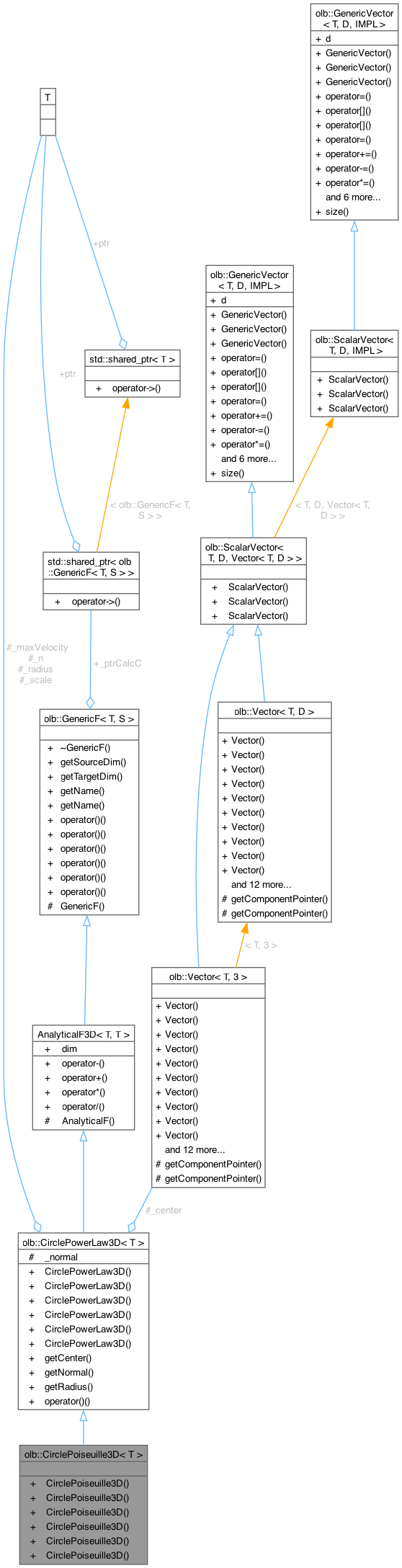
 Inheritance diagram for olb::CirclePoiseuille3D< T >: Collaboration diagram for olb::CirclePoiseuille3D< T >:
Inheritance diagram for olb::CirclePoiseuille3D< T >: Collaboration diagram for olb::CirclePoiseuille3D< T >:Public Member Functions | |
| CirclePoiseuille3D (std::vector< T > axisPoint, std::vector< T > axisDirection, T maxVelocity, T radius, T scale=T(1)) | |
| CirclePoiseuille3D (T center0, T center1, T center2, T normal0, T normal1, T normal2, T radius, T maxVelocity, T scale=T(1)) | |
| CirclePoiseuille3D (SuperGeometry< T, 3 > &superGeometry, int material, T maxVelocity, T distance2Wall, T scale=T(1)) | |
| CirclePoiseuille3D (bool useMeanVelocity, std::vector< T > axisPoint, std::vector< T > axisDirection, T Velocity, T radius, T scale=T(1)) | |
| CirclePoiseuille3D (bool useMeanVelocity, T center0, T center1, T center2, T normal0, T normal1, T normal2, T radius, T Velocity, T scale=T(1)) | |
| CirclePoiseuille3D (bool useMeanVelocity, SuperGeometry< T, 3 > &superGeometry, int material, T Velocity, T distance2Wall, T scale=T(1)) | |
| Public Member Functions inherited from olb::CirclePowerLaw3D< T > | |
| CirclePowerLaw3D (olb::Vector< T, 3 > axisPoint, std::vector< T > axisDirection, T maxVelocity, T radius, T n, T scale=T(1)) | |
| CirclePowerLaw3D (T center0, T center1, T center2, T normal0, T normal1, T normal2, T radius, T maxVelocity, T n, T scale=T(1)) | |
| CirclePowerLaw3D (const SuperGeometry< T, 3 > &superGeometry, int material, T maxVelocity, T n, T distance2Wall, T scale=T(1)) | |
| CirclePowerLaw3D (bool useMeanVelocity, std::vector< T > axisPoint, std::vector< T > axisDirection, T Velocity, T radius, T n, T scale=T(1)) | |
| CirclePowerLaw3D (bool useMeanVelocity, T center0, T center1, T center2, T normal0, T normal1, T normal2, T radius, T Velocity, T n, T scale=T(1)) | |
| CirclePowerLaw3D (bool useMeanVelocity, SuperGeometry< T, 3 > &superGeometry, int material, T Velocity, T n, T distance2Wall, T scale=T(1)) | |
| olb::Vector< T, 3 > | getCenter () |
| Returns centerpoint vector. | |
| std::vector< T > | getNormal () |
| Returns normal vector. | |
| T | getRadius () |
| Returns radi. | |
| bool | operator() (T output[], const T x[]) override |
| Public Member Functions inherited from olb::AnalyticalF< D, T, S > | |
| AnalyticalF< D, T, S > & | operator- (AnalyticalF< D, T, S > &rhs) |
| AnalyticalF< D, T, S > & | operator+ (AnalyticalF< D, T, S > &rhs) |
| AnalyticalF< D, T, S > & | operator* (AnalyticalF< D, T, S > &rhs) |
| AnalyticalF< D, T, S > & | operator/ (AnalyticalF< D, T, S > &rhs) |
| Public Member Functions inherited from olb::GenericF< T, S > | |
| virtual | ~GenericF ()=default |
| int | getSourceDim () const |
| read only access to member variable _m | |
| int | getTargetDim () const |
| read only access to member variable _n | |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
| virtual bool | operator() (T output[], const S input[])=0 |
| has to be implemented for 'every' derived class | |
| bool | operator() (T output[]) |
| wrapper that call the pure virtual operator() (T output[], const S input[]) from above | |
| bool | operator() (T output[], S input0) |
| bool | operator() (T output[], S input0, S input1) |
| bool | operator() (T output[], S input0, S input1, S input2) |
| bool | operator() (T output[], S input0, S input1, S input2, S input3) |
Additional Inherited Members | |
| Public Types inherited from olb::AnalyticalF< D, T, S > | |
| using | identity_functor_type = AnalyticalIdentity<D,T,S> |
| Public Types inherited from olb::GenericF< T, S > | |
| using | targetType = T |
| using | sourceType = S |
| Public Attributes inherited from olb::GenericF< T, S > | |
| std::shared_ptr< GenericF< T, S > > | _ptrCalcC |
| memory management, frees resouces (calcClass) | |
| Static Public Attributes inherited from olb::AnalyticalF< D, T, S > | |
| static constexpr unsigned | dim = D |
| Protected Member Functions inherited from olb::AnalyticalF< D, T, S > | |
| AnalyticalF (int n) | |
| Protected Member Functions inherited from olb::GenericF< T, S > | |
| GenericF (int targetDim, int sourceDim) | |
| Protected Attributes inherited from olb::CirclePowerLaw3D< T > | |
| olb::Vector< T, 3 > | _center |
| std::vector< T > | _normal |
| T | _radius |
| T | _maxVelocity |
| T | _n |
| T | _scale |
Velocity profile for util::round pipes and a laminar flow of a Newtonian fluid: u(r)=u_max*(1-(r/R)^2)
Definition at line 215 of file frameChangeF3D.h.
| olb::CirclePoiseuille3D< T >::CirclePoiseuille3D | ( | std::vector< T > | axisPoint, |
| std::vector< T > | axisDirection, | ||
| T | maxVelocity, | ||
| T | radius, | ||
| T | scale = T(1) ) |
Definition at line 317 of file frameChangeF3D.hh.
| olb::CirclePoiseuille3D< T >::CirclePoiseuille3D | ( | T | center0, |
| T | center1, | ||
| T | center2, | ||
| T | normal0, | ||
| T | normal1, | ||
| T | normal2, | ||
| T | radius, | ||
| T | maxVelocity, | ||
| T | scale = T(1) ) |
Definition at line 322 of file frameChangeF3D.hh.
| olb::CirclePoiseuille3D< T >::CirclePoiseuille3D | ( | SuperGeometry< T, 3 > & | superGeometry, |
| int | material, | ||
| T | maxVelocity, | ||
| T | distance2Wall, | ||
| T | scale = T(1) ) |
Definition at line 327 of file frameChangeF3D.hh.
| olb::CirclePoiseuille3D< T >::CirclePoiseuille3D | ( | bool | useMeanVelocity, |
| std::vector< T > | axisPoint, | ||
| std::vector< T > | axisDirection, | ||
| T | Velocity, | ||
| T | radius, | ||
| T | scale = T(1) ) |
Definition at line 332 of file frameChangeF3D.hh.
References olb::CirclePowerLaw3D< T >::_maxVelocity.
| olb::CirclePoiseuille3D< T >::CirclePoiseuille3D | ( | bool | useMeanVelocity, |
| T | center0, | ||
| T | center1, | ||
| T | center2, | ||
| T | normal0, | ||
| T | normal1, | ||
| T | normal2, | ||
| T | radius, | ||
| T | Velocity, | ||
| T | scale = T(1) ) |
Definition at line 341 of file frameChangeF3D.hh.
References olb::CirclePowerLaw3D< T >::_maxVelocity.
| olb::CirclePoiseuille3D< T >::CirclePoiseuille3D | ( | bool | useMeanVelocity, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| T | Velocity, | ||
| T | distance2Wall, | ||
| T | scale = T(1) ) |
Definition at line 350 of file frameChangeF3D.hh.
References olb::CirclePowerLaw3D< T >::_maxVelocity.