|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
#include <frameChangeF3D.h>
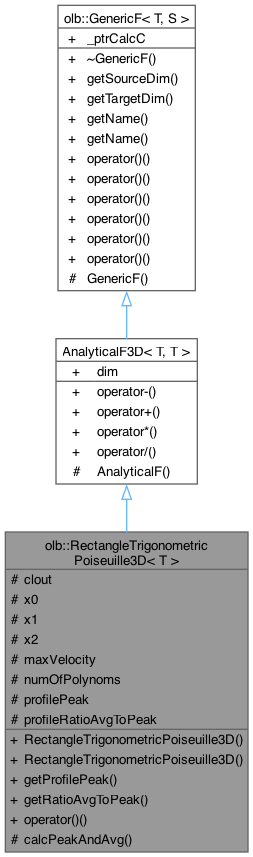
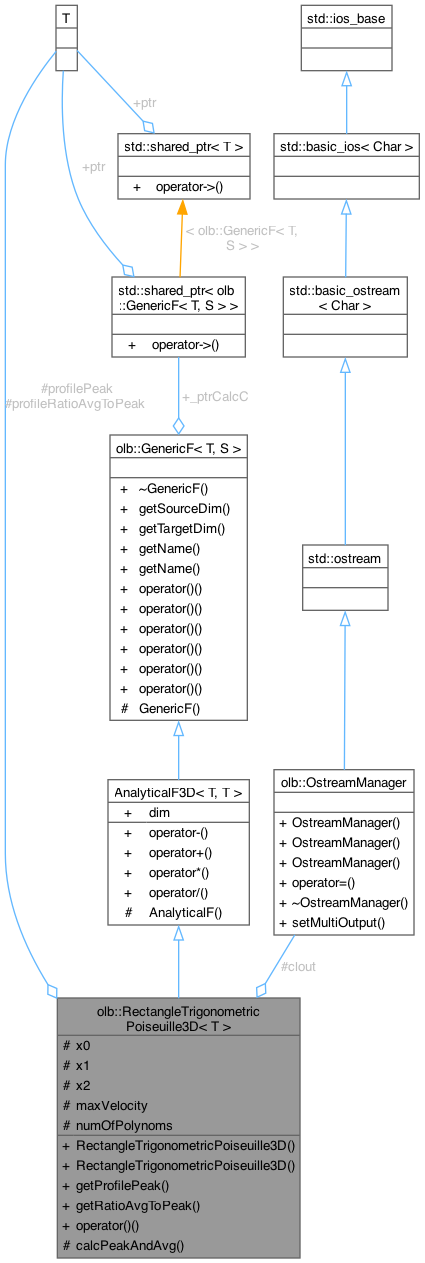
 Inheritance diagram for olb::RectangleTrigonometricPoiseuille3D< T >: Collaboration diagram for olb::RectangleTrigonometricPoiseuille3D< T >:
Inheritance diagram for olb::RectangleTrigonometricPoiseuille3D< T >: Collaboration diagram for olb::RectangleTrigonometricPoiseuille3D< T >:Public Member Functions | |
| RectangleTrigonometricPoiseuille3D (std::vector< T > &x0_, std::vector< T > &x1_, std::vector< T > &x2_, std::vector< T > &maxVelocity, int numOfPolynoms_=1) | |
| RectangleTrigonometricPoiseuille3D (SuperGeometry< T, 3 > &superGeometry_, int material_, std::vector< T > &maxVelocity_, T offsetX, T offsetY, T offsetZ, int numOfPolynoms_=1) | |
| constructor from material numbers | |
| T | getProfilePeak () |
| T | getRatioAvgToPeak () |
| bool | operator() (T output[], const T x[]) override |
| Public Member Functions inherited from olb::AnalyticalF< D, T, S > | |
| AnalyticalF< D, T, S > & | operator- (AnalyticalF< D, T, S > &rhs) |
| AnalyticalF< D, T, S > & | operator+ (AnalyticalF< D, T, S > &rhs) |
| AnalyticalF< D, T, S > & | operator* (AnalyticalF< D, T, S > &rhs) |
| AnalyticalF< D, T, S > & | operator/ (AnalyticalF< D, T, S > &rhs) |
| Public Member Functions inherited from olb::GenericF< T, S > | |
| virtual | ~GenericF ()=default |
| int | getSourceDim () const |
| read only access to member variable _m | |
| int | getTargetDim () const |
| read only access to member variable _n | |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
| virtual bool | operator() (T output[], const S input[])=0 |
| has to be implemented for 'every' derived class | |
| bool | operator() (T output[]) |
| wrapper that call the pure virtual operator() (T output[], const S input[]) from above | |
| bool | operator() (T output[], S input0) |
| bool | operator() (T output[], S input0, S input1) |
| bool | operator() (T output[], S input0, S input1, S input2) |
| bool | operator() (T output[], S input0, S input1, S input2, S input3) |
Protected Member Functions | |
| void | calcPeakAndAvg () |
| Protected Member Functions inherited from olb::AnalyticalF< D, T, S > | |
| AnalyticalF (int n) | |
| Protected Member Functions inherited from olb::GenericF< T, S > | |
| GenericF (int targetDim, int sourceDim) | |
Protected Attributes | |
| OstreamManager | clout |
| std::vector< T > | x0 |
| std::vector< T > | x1 |
| std::vector< T > | x2 |
| std::vector< T > | maxVelocity |
| int | numOfPolynoms |
| T | profilePeak |
| T | profileRatioAvgToPeak |
Additional Inherited Members | |
| Public Types inherited from olb::AnalyticalF< D, T, S > | |
| using | identity_functor_type = AnalyticalIdentity<D,T,S> |
| Public Types inherited from olb::GenericF< T, S > | |
| using | targetType = T |
| using | sourceType = S |
| Public Attributes inherited from olb::GenericF< T, S > | |
| std::shared_ptr< GenericF< T, S > > | _ptrCalcC |
| memory management, frees resouces (calcClass) | |
| Static Public Attributes inherited from olb::AnalyticalF< D, T, S > | |
| static constexpr unsigned | dim = D |
Definition at line 264 of file frameChangeF3D.h.
| olb::RectangleTrigonometricPoiseuille3D< T >::RectangleTrigonometricPoiseuille3D | ( | std::vector< T > & | x0_, |
| std::vector< T > & | x1_, | ||
| std::vector< T > & | x2_, | ||
| std::vector< T > & | maxVelocity, | ||
| int | numOfPolynoms_ = 1 ) |
Definition at line 518 of file frameChangeF3D.hh.
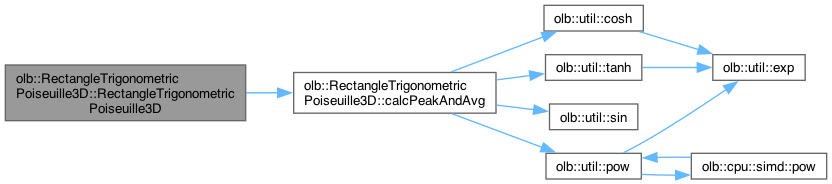
References olb::RectangleTrigonometricPoiseuille3D< T >::calcPeakAndAvg().
Here is the call graph for this function:| olb::RectangleTrigonometricPoiseuille3D< T >::RectangleTrigonometricPoiseuille3D | ( | SuperGeometry< T, 3 > & | superGeometry_, |
| int | material_, | ||
| std::vector< T > & | maxVelocity_, | ||
| T | offsetX, | ||
| T | offsetY, | ||
| T | offsetZ, | ||
| int | numOfPolynoms_ = 1 ) |
constructor from material numbers
offsetX,Y,Z is a positive number denoting the distance from border voxels of material_ to the zerovelocity boundary
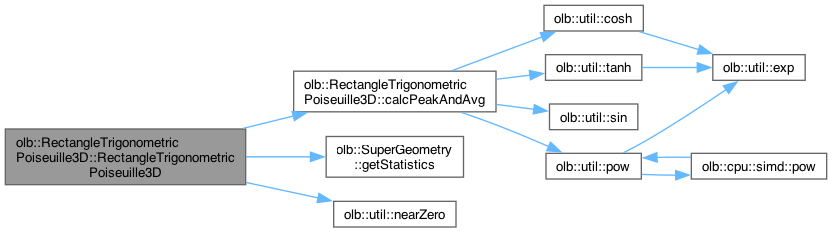
Definition at line 528 of file frameChangeF3D.hh.
References olb::RectangleTrigonometricPoiseuille3D< T >::calcPeakAndAvg(), olb::RectangleTrigonometricPoiseuille3D< T >::clout, olb::SuperGeometry< T, D >::getStatistics(), olb::util::nearZero(), olb::RectangleTrigonometricPoiseuille3D< T >::x0, olb::RectangleTrigonometricPoiseuille3D< T >::x1, and olb::RectangleTrigonometricPoiseuille3D< T >::x2.
Here is the call graph for this function:
|
protected |
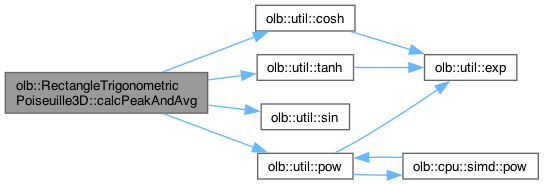
Definition at line 582 of file frameChangeF3D.hh.
References olb::util::cosh(), M_PI, olb::util::pow(), olb::util::sin(), and olb::util::tanh().
Here is the call graph for this function: Here is the caller graph for this function:| T olb::RectangleTrigonometricPoiseuille3D< T >::getProfilePeak | ( | ) |
Definition at line 602 of file frameChangeF3D.hh.
| T olb::RectangleTrigonometricPoiseuille3D< T >::getRatioAvgToPeak | ( | ) |
Definition at line 608 of file frameChangeF3D.hh.
|
override |
Definition at line 614 of file frameChangeF3D.hh.
References olb::util::cosh(), olb::util::fabs(), M_PI, olb::util::normalize(), olb::util::pow(), and olb::util::sin().
Here is the call graph for this function:
|
protected |
Definition at line 266 of file frameChangeF3D.h.
|
protected |
Definition at line 270 of file frameChangeF3D.h.
|
protected |
Definition at line 271 of file frameChangeF3D.h.
|
protected |
Definition at line 272 of file frameChangeF3D.h.
|
protected |
Definition at line 273 of file frameChangeF3D.h.
|
protected |
Definition at line 267 of file frameChangeF3D.h.
|
protected |
Definition at line 268 of file frameChangeF3D.h.
|
protected |
Definition at line 269 of file frameChangeF3D.h.