|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
indicator function for a 3d frustum More...
#include <indicatorF3D.h>
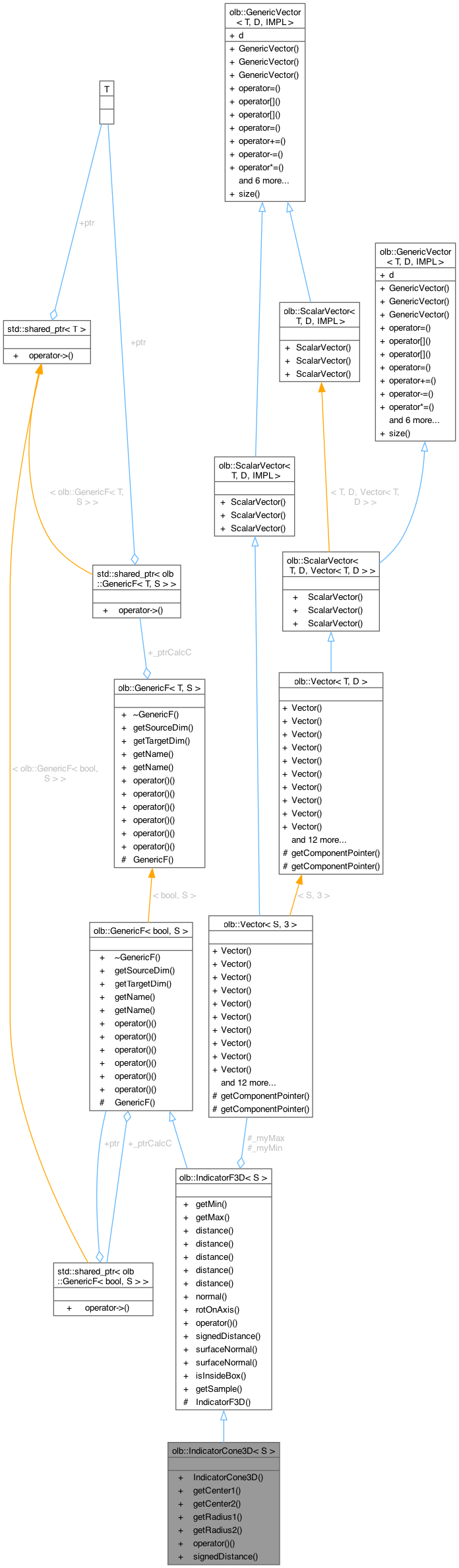
 Inheritance diagram for olb::IndicatorCone3D< S >: Collaboration diagram for olb::IndicatorCone3D< S >:
Inheritance diagram for olb::IndicatorCone3D< S >: Collaboration diagram for olb::IndicatorCone3D< S >:Public Member Functions | |
| IndicatorCone3D (Vector< S, 3 > center1, Vector< S, 3 > center2, S radius1, S radius2=0) | |
| Vector< S, 3 > const & | getCenter1 () const |
| Vector< S, 3 > const & | getCenter2 () const |
| S | getRadius1 () const |
| S | getRadius2 () const |
| bool | operator() (bool output[], const S input[]) override |
| has to be implemented for 'every' derived class | |
| S | signedDistance (const Vector< S, 3 > &input) override |
| Returns signed distance to the nearest point on the indicator surface. | |
| Public Member Functions inherited from olb::IndicatorF3D< S > | |
| virtual Vector< S, 3 > & | getMin () |
| virtual Vector< S, 3 > & | getMax () |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin, S precision, const Vector< S, 3 > &direction) |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin, const Vector< S, 3 > &direction, S precision, S pitch) |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin, const Vector< S, 3 > &direction, int iC=-1) |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin) |
| virtual bool | distance (S &distance, const S input[]) |
| virtual bool | normal (Vector< S, 3 > &normal, const Vector< S, 3 > &origin, const Vector< S, 3 > &direction, int iC=-1) |
| returns true and the normal if there was one found for an given origin and direction | |
| virtual bool | rotOnAxis (Vector< S, 3 > &vec_rot, const Vector< S, 3 > &vec, const Vector< S, 3 > &axis, S &theta) |
| Rotate vector around axis by angle theta. | |
| virtual bool | operator() (bool output[1], const S input[3]) |
| Returns true if input is inside the indicator. | |
| virtual Vector< S, 3 > | surfaceNormal (const Vector< S, 3 > &pos, const S meshSize) |
| Return surface normal. | |
| Vector< S, 3 > | surfaceNormal (const Vector< S, 3 > &pos, const S meshSize, std::function< Vector< S, 3 >(const Vector< S, 3 > &)> transformPos) |
| Return surface normal after possible translation and rotation. | |
| bool | isInsideBox (Vector< S, 3 > point) |
Returns true if point is inside a cube with corners _myMin and _myMax | |
| virtual Vector< S, 3 > | getSample (const std::function< S()> &randomness) const |
| Public Member Functions inherited from olb::GenericF< bool, S > | |
| virtual | ~GenericF ()=default |
| int | getSourceDim () const |
| read only access to member variable _m | |
| int | getTargetDim () const |
| read only access to member variable _n | |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
| bool | operator() (bool output[]) |
| wrapper that call the pure virtual operator() (T output[], const S input[]) from above | |
| bool | operator() (bool output[], S input0) |
| bool | operator() (bool output[], S input0, S input1) |
| bool | operator() (bool output[], S input0, S input1, S input2) |
| bool | operator() (bool output[], S input0, S input1, S input2, S input3) |
Additional Inherited Members | |
| Public Types inherited from olb::GenericF< bool, S > | |
| using | targetType |
| using | sourceType |
| Public Attributes inherited from olb::GenericF< bool, S > | |
| std::shared_ptr< GenericF< bool, S > > | _ptrCalcC |
| memory management, frees resouces (calcClass) | |
| Protected Member Functions inherited from olb::IndicatorF3D< S > | |
| IndicatorF3D () | |
| Protected Member Functions inherited from olb::GenericF< bool, S > | |
| GenericF (int targetDim, int sourceDim) | |
| Protected Attributes inherited from olb::IndicatorF3D< S > | |
| Vector< S, 3 > | _myMin |
| Vector< S, 3 > | _myMax |
indicator function for a 3d frustum
Definition at line 171 of file indicatorF3D.h.
| olb::IndicatorCone3D< S >::IndicatorCone3D | ( | Vector< S, 3 > | center1, |
| Vector< S, 3 > | center2, | ||
| S | radius1, | ||
| S | radius2 = 0 ) |
Definition at line 439 of file indicatorF3D.hh.
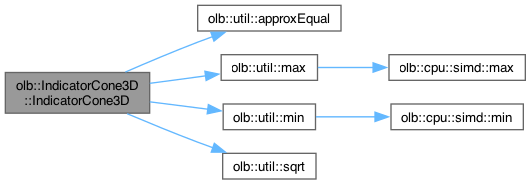
References olb::IndicatorF3D< S >::_myMax, olb::IndicatorF3D< S >::_myMin, olb::util::approxEqual(), olb::util::max(), olb::util::min(), and olb::util::sqrt().
Here is the call graph for this function:| Vector< S, 3 > const & olb::IndicatorCone3D< S >::getCenter1 | ( | ) | const |
Definition at line 501 of file indicatorF3D.hh.
| Vector< S, 3 > const & olb::IndicatorCone3D< S >::getCenter2 | ( | ) | const |
Definition at line 507 of file indicatorF3D.hh.
| S olb::IndicatorCone3D< S >::getRadius1 | ( | ) | const |
Definition at line 513 of file indicatorF3D.hh.
| S olb::IndicatorCone3D< S >::getRadius2 | ( | ) | const |
Definition at line 519 of file indicatorF3D.hh.
|
overridevirtual |
has to be implemented for 'every' derived class
Implements olb::GenericF< bool, S >.
Definition at line 487 of file indicatorF3D.hh.
|
overridevirtual |
Returns signed distance to the nearest point on the indicator surface.
Reimplemented from olb::IndicatorF3D< S >.
Definition at line 525 of file indicatorF3D.hh.
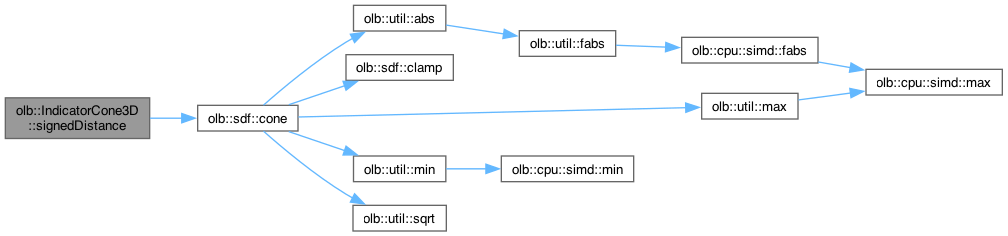
References olb::sdf::cone().
Here is the call graph for this function: