|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
This class computes the finite difference approximation to LB boundary conditions on a plane wall in 3D with all the terms of the CE expansion. More...
#include <extendedFiniteDifferenceBoundary3D.h>
 Inheritance diagram for olb::ExtendedFdPlaneBoundaryPostProcessor3D< T, DESCRIPTOR, direction, orientation >: Collaboration diagram for olb::ExtendedFdPlaneBoundaryPostProcessor3D< T, DESCRIPTOR, direction, orientation >:
Inheritance diagram for olb::ExtendedFdPlaneBoundaryPostProcessor3D< T, DESCRIPTOR, direction, orientation >: Collaboration diagram for olb::ExtendedFdPlaneBoundaryPostProcessor3D< T, DESCRIPTOR, direction, orientation >:Public Member Functions | |
| ExtendedFdPlaneBoundaryPostProcessor3D (int x0_, int x1_, int y0_, int y1_, int z0_, int z1_) | |
| int | extent () const override |
| Extent of application area (0 for purely local operations) | |
| int | extent (int whichDirection) const override |
| Extent of application area along a direction (0 or 1) | |
| void | process (BlockLattice< T, DESCRIPTOR > &blockLattice) override |
| Execute post-processing step. | |
| void | processSubDomain (BlockLattice< T, DESCRIPTOR > &blockLattice, int x0_, int x1_, int y0_, int y1_, int z0_, int z1_) override |
| Execute post-processing step on a sublattice. | |
| Public Member Functions inherited from olb::PostProcessor3D< T, DESCRIPTOR > | |
| PostProcessor3D () | |
| virtual | ~PostProcessor3D () |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
| int | getPriority () const |
| read only access to priority | |
Additional Inherited Members | |
| Protected Attributes inherited from olb::PostProcessor3D< T, DESCRIPTOR > | |
| int | _priority |
This class computes the finite difference approximation to LB boundary conditions on a plane wall in 3D with all the terms of the CE expansion.
Definition at line 39 of file extendedFiniteDifferenceBoundary3D.h.
| olb::ExtendedFdPlaneBoundaryPostProcessor3D< T, DESCRIPTOR, direction, orientation >::ExtendedFdPlaneBoundaryPostProcessor3D | ( | int | x0_, |
| int | x1_, | ||
| int | y0_, | ||
| int | y1_, | ||
| int | z0_, | ||
| int | z1_ ) |
Definition at line 38 of file extendedFiniteDifferenceBoundary3D.hh.
References olb::PostProcessor3D< T, DESCRIPTOR >::getName(), and OLB_PRECONDITION.
Here is the call graph for this function:
|
inlineoverridevirtual |
Extent of application area (0 for purely local operations)
Implements olb::PostProcessor3D< T, DESCRIPTOR >.
Definition at line 42 of file extendedFiniteDifferenceBoundary3D.h.
|
inlineoverridevirtual |
Extent of application area along a direction (0 or 1)
Implements olb::PostProcessor3D< T, DESCRIPTOR >.
Definition at line 46 of file extendedFiniteDifferenceBoundary3D.h.
|
overridevirtual |
Execute post-processing step.
Implements olb::PostProcessor3D< T, DESCRIPTOR >.
Definition at line 165 of file extendedFiniteDifferenceBoundary3D.hh.
|
overridevirtual |
Execute post-processing step on a sublattice.
Implements olb::PostProcessor3D< T, DESCRIPTOR >.
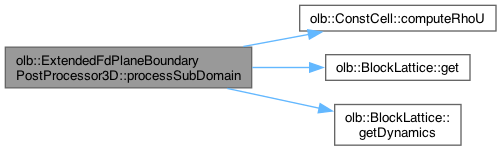
Definition at line 47 of file extendedFiniteDifferenceBoundary3D.hh.
References olb::ConstCell< T, DESCRIPTOR >::computeRhoU(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockLattice< T, DESCRIPTOR >::getDynamics().
Here is the call graph for this function: