|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
This class computes the inamuro BC with general dynamics. More...
#include <inamuroNewtonRaphsonDynamics.h>
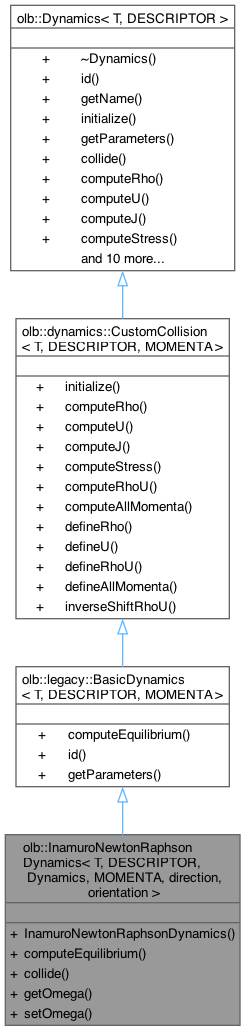
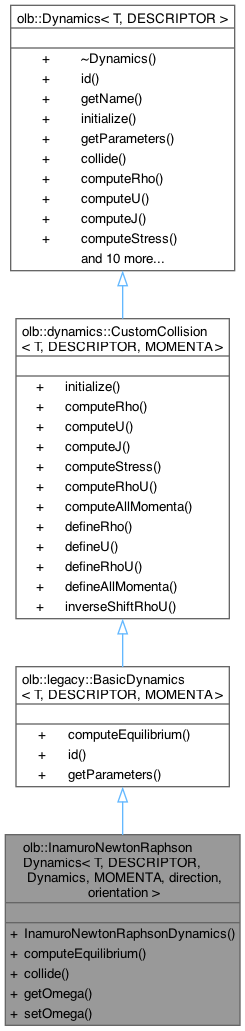
 Inheritance diagram for olb::InamuroNewtonRaphsonDynamics< T, DESCRIPTOR, Dynamics, MOMENTA, direction, orientation >: Collaboration diagram for olb::InamuroNewtonRaphsonDynamics< T, DESCRIPTOR, Dynamics, MOMENTA, direction, orientation >:
Inheritance diagram for olb::InamuroNewtonRaphsonDynamics< T, DESCRIPTOR, Dynamics, MOMENTA, direction, orientation >: Collaboration diagram for olb::InamuroNewtonRaphsonDynamics< T, DESCRIPTOR, Dynamics, MOMENTA, direction, orientation >:Public Member Functions | |
| InamuroNewtonRaphsonDynamics (T omega) | |
| Constructor. | |
| T | computeEquilibrium (int iPop, T rho, const T u[DESCRIPTOR::d], T uSqr) const override |
| Compute equilibrium distribution function. | |
| CellStatistic< T > | collide (Cell< T, DESCRIPTOR > &cell, LatticeStatistics< T > &statistics) override |
| Collision step. | |
| T | getOmega () const |
| Get local relaxation parameter of the dynamics. | |
| void | setOmega (T omega) |
| Set local relaxation parameter of the dynamics. | |
| Public Member Functions inherited from olb::legacy::BasicDynamics< T, DESCRIPTOR, MOMENTA > | |
| T | computeEquilibrium (int iPop, T rho, const T u[DESCRIPTOR::d]) const override |
| Return iPop equilibrium for given first and second momenta. | |
| std::type_index | id () override |
| Expose unique type-identifier for RTTI. | |
| AbstractParameters< T, DESCRIPTOR > & | getParameters (BlockLattice< T, DESCRIPTOR > &block) override |
| Parameters access for legacy post processors. | |
| Public Member Functions inherited from olb::dynamics::CustomCollision< T, DESCRIPTOR, MOMENTA > | |
| void | initialize (Cell< T, DESCRIPTOR > &cell) override |
| Initialize dynamics-specific data for cell. | |
| T | computeRho (ConstCell< T, DESCRIPTOR > &cell) const override |
| Compute particle density. | |
| void | computeU (ConstCell< T, DESCRIPTOR > &cell, T u[DESCRIPTOR::d]) const override |
| Compute fluid velocity. | |
| void | computeJ (ConstCell< T, DESCRIPTOR > &cell, T j[DESCRIPTOR::d]) const override |
| Compute fluid momentum. | |
| void | computeStress (ConstCell< T, DESCRIPTOR > &cell, T rho, const T u[DESCRIPTOR::d], T pi[util::TensorVal< DESCRIPTOR >::n]) const override |
| Compute stress tensor. | |
| void | computeRhoU (ConstCell< T, DESCRIPTOR > &cell, T &rho, T u[DESCRIPTOR::d]) const override |
| Compute fluid velocity and particle density. | |
| void | computeAllMomenta (ConstCell< T, DESCRIPTOR > &cell, T &rho, T u[DESCRIPTOR::d], T pi[util::TensorVal< DESCRIPTOR >::n]) const override |
| Compute all momenta up to second order. | |
| void | defineRho (Cell< T, DESCRIPTOR > &cell, T rho) override |
| Set particle density. | |
| void | defineU (Cell< T, DESCRIPTOR > &cell, const T u[DESCRIPTOR::d]) override |
| Set fluid velocity. | |
| void | defineRhoU (Cell< T, DESCRIPTOR > &cell, T rho, const T u[DESCRIPTOR::d]) override |
| Define fluid velocity and particle density. | |
| void | defineAllMomenta (Cell< T, DESCRIPTOR > &cell, T rho, const T u[DESCRIPTOR::d], const T pi[util::TensorVal< DESCRIPTOR >::n]) override |
| Define all momenta up to second order. | |
| void | inverseShiftRhoU (ConstCell< T, DESCRIPTOR > &cell, T &rho, T u[DESCRIPTOR::d]) const override |
| Calculate population momenta s.t. the physical momenta are reproduced by the computeRhoU. | |
| Public Member Functions inherited from olb::Dynamics< T, DESCRIPTOR > | |
| virtual | ~Dynamics () any_platform |
| virtual std::string | getName () const |
| Return human-readable name. | |
| virtual CellStatistic< T > | collide (Cell< T, DESCRIPTOR > &cell) |
| Perform purely-local collision step on Cell interface (legacy, to be deprecated) | |
| void | iniEquilibrium (Cell< T, DESCRIPTOR > &cell, T rho, const T u[DESCRIPTOR::d]) |
| Initialize to equilibrium distribution. | |
| void | iniRegularized (Cell< T, DESCRIPTOR > &cell, T rho, const T u[DESCRIPTOR::d], const T pi[util::TensorVal< DESCRIPTOR >::n]) |
| Initialize cell to equilibrium and non-equilibrum part. | |
Additional Inherited Members | |
| Public Types inherited from olb::dynamics::CustomCollision< T, DESCRIPTOR, MOMENTA > | |
| using | value_t = T |
| using | descriptor_t = DESCRIPTOR |
| using | MomentaF = typename MOMENTA::template type<DESCRIPTOR> |
| Public Types inherited from olb::Dynamics< T, DESCRIPTOR > | |
| using | value_t = T |
| using | descriptor_t = DESCRIPTOR |
This class computes the inamuro BC with general dynamics.
It uses the formula from the paper by Inamuro et al. but since there is no explict solution for a lattice different from the D2Q9 and for a speed of sound c_s=q/util::sqrt(3), we have to use a Newton-Raphson algorithm to implement these boundary conditions.
Definition at line 40 of file inamuroNewtonRaphsonDynamics.h.
| olb::InamuroNewtonRaphsonDynamics< T, DESCRIPTOR, Dynamics, MOMENTA, direction, orientation >::InamuroNewtonRaphsonDynamics | ( | T | omega | ) |
Constructor.
Definition at line 39 of file inamuroNewtonRaphsonDynamics.hh.
References olb::Dynamics< T, DESCRIPTOR >::getName().
Here is the call graph for this function:
|
override |
Collision step.
Definition at line 59 of file inamuroNewtonRaphsonDynamics.hh.
|
override |
Compute equilibrium distribution function.
Definition at line 52 of file inamuroNewtonRaphsonDynamics.hh.
| T olb::InamuroNewtonRaphsonDynamics< T, DESCRIPTOR, Dynamics, MOMENTA, direction, orientation >::getOmega | ( | ) | const |
Get local relaxation parameter of the dynamics.
Definition at line 151 of file inamuroNewtonRaphsonDynamics.hh.
| void olb::InamuroNewtonRaphsonDynamics< T, DESCRIPTOR, Dynamics, MOMENTA, direction, orientation >::setOmega | ( | T | omega | ) |
Set local relaxation parameter of the dynamics.
Definition at line 157 of file inamuroNewtonRaphsonDynamics.hh.