|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
indicator function for a 3d-cuboid, parallel to the planes x=0, y=0, z=0. More...
#include <indicatorF3D.h>
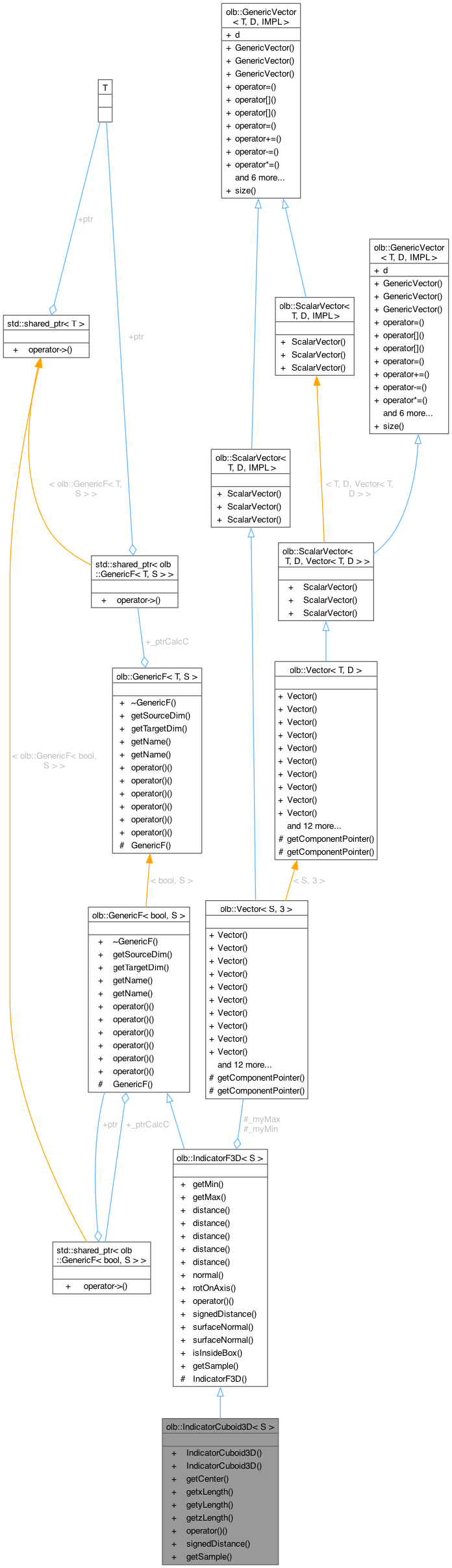
 Inheritance diagram for olb::IndicatorCuboid3D< S >: Collaboration diagram for olb::IndicatorCuboid3D< S >:
Inheritance diagram for olb::IndicatorCuboid3D< S >: Collaboration diagram for olb::IndicatorCuboid3D< S >:Public Member Functions | |
| IndicatorCuboid3D (Vector< S, 3 > extend, Vector< S, 3 > origin) | |
| constructs an cuboid with x axis from origin[0] to origin[0]+extend[0], ... | |
| IndicatorCuboid3D (S xlength, S ylength, S zlength, Vector< S, 3 > center) | |
| constructs an cuboid with x axis dimension center[0]-xlength/2 to center[0]+xlength/2 | |
| Vector< S, 3 > const & | getCenter () const |
| S const | getxLength () const |
| S const | getyLength () const |
| S const | getzLength () const |
| bool | operator() (bool output[], const S input[]) override |
| returns true if input is inside, otherwise false | |
| S | signedDistance (const Vector< S, 3 > &input) override |
| Returns signed distance to the nearest point on the indicator surface. | |
| Vector< S, 3 > | getSample (const std::function< S()> &randomness) const override |
| Public Member Functions inherited from olb::IndicatorF3D< S > | |
| virtual Vector< S, 3 > & | getMin () |
| virtual Vector< S, 3 > & | getMax () |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin, S precision, const Vector< S, 3 > &direction) |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin, const Vector< S, 3 > &direction, S precision, S pitch) |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin, const Vector< S, 3 > &direction, int iC=-1) |
| virtual bool | distance (S &distance, const Vector< S, 3 > &origin) |
| virtual bool | distance (S &distance, const S input[]) |
| virtual bool | normal (Vector< S, 3 > &normal, const Vector< S, 3 > &origin, const Vector< S, 3 > &direction, int iC=-1) |
| returns true and the normal if there was one found for an given origin and direction | |
| virtual bool | rotOnAxis (Vector< S, 3 > &vec_rot, const Vector< S, 3 > &vec, const Vector< S, 3 > &axis, S &theta) |
| Rotate vector around axis by angle theta. | |
| virtual bool | operator() (bool output[1], const S input[3]) |
| Returns true if input is inside the indicator. | |
| virtual Vector< S, 3 > | surfaceNormal (const Vector< S, 3 > &pos, const S meshSize) |
| Return surface normal. | |
| Vector< S, 3 > | surfaceNormal (const Vector< S, 3 > &pos, const S meshSize, std::function< Vector< S, 3 >(const Vector< S, 3 > &)> transformPos) |
| Return surface normal after possible translation and rotation. | |
| bool | isInsideBox (Vector< S, 3 > point) |
Returns true if point is inside a cube with corners _myMin and _myMax | |
| Public Member Functions inherited from olb::GenericF< bool, S > | |
| virtual | ~GenericF ()=default |
| int | getSourceDim () const |
| read only access to member variable _m | |
| int | getTargetDim () const |
| read only access to member variable _n | |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
| bool | operator() (bool output[]) |
| wrapper that call the pure virtual operator() (T output[], const S input[]) from above | |
| bool | operator() (bool output[], S input0) |
| bool | operator() (bool output[], S input0, S input1) |
| bool | operator() (bool output[], S input0, S input1, S input2) |
| bool | operator() (bool output[], S input0, S input1, S input2, S input3) |
Additional Inherited Members | |
| Public Types inherited from olb::GenericF< bool, S > | |
| using | targetType |
| using | sourceType |
| Public Attributes inherited from olb::GenericF< bool, S > | |
| std::shared_ptr< GenericF< bool, S > > | _ptrCalcC |
| memory management, frees resouces (calcClass) | |
| Protected Member Functions inherited from olb::IndicatorF3D< S > | |
| IndicatorF3D () | |
| Protected Member Functions inherited from olb::GenericF< bool, S > | |
| GenericF (int targetDim, int sourceDim) | |
| Protected Attributes inherited from olb::IndicatorF3D< S > | |
| Vector< S, 3 > | _myMin |
| Vector< S, 3 > | _myMax |
indicator function for a 3d-cuboid, parallel to the planes x=0, y=0, z=0.
| extend | must have only positive elements |
| xLength | must be positive |
Definition at line 238 of file indicatorF3D.h.
| olb::IndicatorCuboid3D< S >::IndicatorCuboid3D | ( | Vector< S, 3 > | extend, |
| Vector< S, 3 > | origin ) |
constructs an cuboid with x axis from origin[0] to origin[0]+extend[0], ...
Definition at line 640 of file indicatorF3D.hh.
References olb::IndicatorF3D< S >::_myMax, and olb::IndicatorF3D< S >::_myMin.
| olb::IndicatorCuboid3D< S >::IndicatorCuboid3D | ( | S | xlength, |
| S | ylength, | ||
| S | zlength, | ||
| Vector< S, 3 > | center ) |
constructs an cuboid with x axis dimension center[0]-xlength/2 to center[0]+xlength/2
Definition at line 650 of file indicatorF3D.hh.
References olb::IndicatorF3D< S >::_myMax, and olb::IndicatorF3D< S >::_myMin.
| Vector< S, 3 > const & olb::IndicatorCuboid3D< S >::getCenter | ( | ) | const |
Definition at line 660 of file indicatorF3D.hh.
|
overridevirtual |
| randomness | Callable returning uniformly sampled values in [0,1] |
Reimplemented from olb::IndicatorF3D< S >.
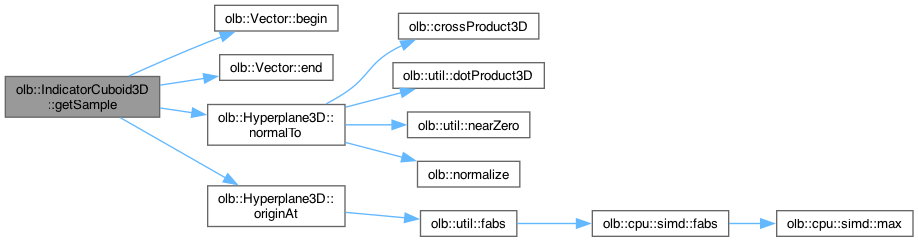
Definition at line 709 of file indicatorF3D.hh.
References olb::Vector< T, D >::begin(), olb::Vector< T, D >::end(), olb::Hyperplane3D< T >::normalTo(), and olb::Hyperplane3D< T >::originAt().
Here is the call graph for this function:| S const olb::IndicatorCuboid3D< S >::getxLength | ( | ) | const |
Definition at line 666 of file indicatorF3D.hh.
Here is the caller graph for this function:| S const olb::IndicatorCuboid3D< S >::getyLength | ( | ) | const |
Definition at line 672 of file indicatorF3D.hh.
| S const olb::IndicatorCuboid3D< S >::getzLength | ( | ) | const |
Definition at line 678 of file indicatorF3D.hh.
|
overridevirtual |
returns true if input is inside, otherwise false
Implements olb::GenericF< bool, S >.
Reimplemented in olb::IndicatorCuboidRotate3D< S >.
Definition at line 684 of file indicatorF3D.hh.
Here is the caller graph for this function:
|
overridevirtual |
Returns signed distance to the nearest point on the indicator surface.
Reimplemented from olb::IndicatorF3D< S >.
Reimplemented in olb::IndicatorCuboidRotate3D< S >.
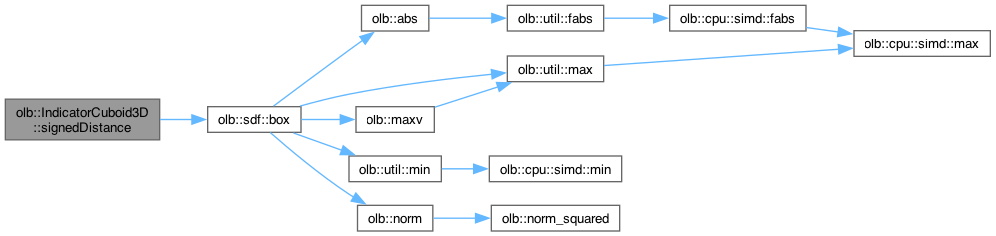
Definition at line 703 of file indicatorF3D.hh.
References olb::sdf::box().
Here is the call graph for this function: Here is the caller graph for this function: