|
| struct | olb::CellStatistic< T > |
| | Return value of any collision. More...
|
| |
| struct | olb::Dynamics< T, DESCRIPTOR > |
| | Interface for per-cell dynamics. More...
|
| |
| struct | olb::dynamics::DefaultCombination |
| | Default combination rule used by dynamics::Tuple. More...
|
| |
| struct | olb::dynamics::is_vectorizable< DYNAMICS, typename > |
| | DYNAMICS is not explicitly marked as unvectorizable. More...
|
| |
| struct | olb::dynamics::is_vectorizable< DYNAMICS, std::enable_if_t<!DYNAMICS::is_vectorizable > > |
| | DYNAMICS is explicitly marked as unvectorizable. More...
|
| |
| struct | olb::dynamics::Tuple< T, DESCRIPTOR, MOMENTA, EQUILIBRIUM, COLLISION, COMBINATION_RULE > |
| | Dynamics constructed as a tuple of momenta, equilibrium and collision. More...
|
| |
| struct | olb::dynamics::CustomCollision< T, DESCRIPTOR, MOMENTA > |
| |
| struct | olb::dynamics::ParameterFromCell< PARAMETER, DYNAMICS > |
| | Set PARAMETER of DYNAMICS from CELL (for CustomCollision-based DYNAMICS) More...
|
| |
| struct | olb::dynamics::is_generic< DYNAMICS, CELL, PARAMETERS, typename > |
| | DYNAMICS doesn't provide apply method template. More...
|
| |
| struct | olb::dynamics::is_generic< DYNAMICS, CELL, PARAMETERS, std::enable_if_t< std::is_member_function_pointer_v< decltype(&DYNAMICS::template apply< CELL, PARAMETERS >)> > > |
| | DYNAMICS provides apply method template. More...
|
| |
| struct | olb::dynamics::has_parametrized_momenta< DYNAMICS, typename > |
| | DYNAMICS is not explicitly marked as requiring parameters outside DYNAMICS::apply. More...
|
| |
| struct | olb::dynamics::has_parametrized_momenta< DYNAMICS, std::enable_if_t< DYNAMICS::has_parametrized_momenta > > |
| | DYNAMICS is explicitly marked as requiring parameters outside DYNAMICS::apply. More...
|
| |
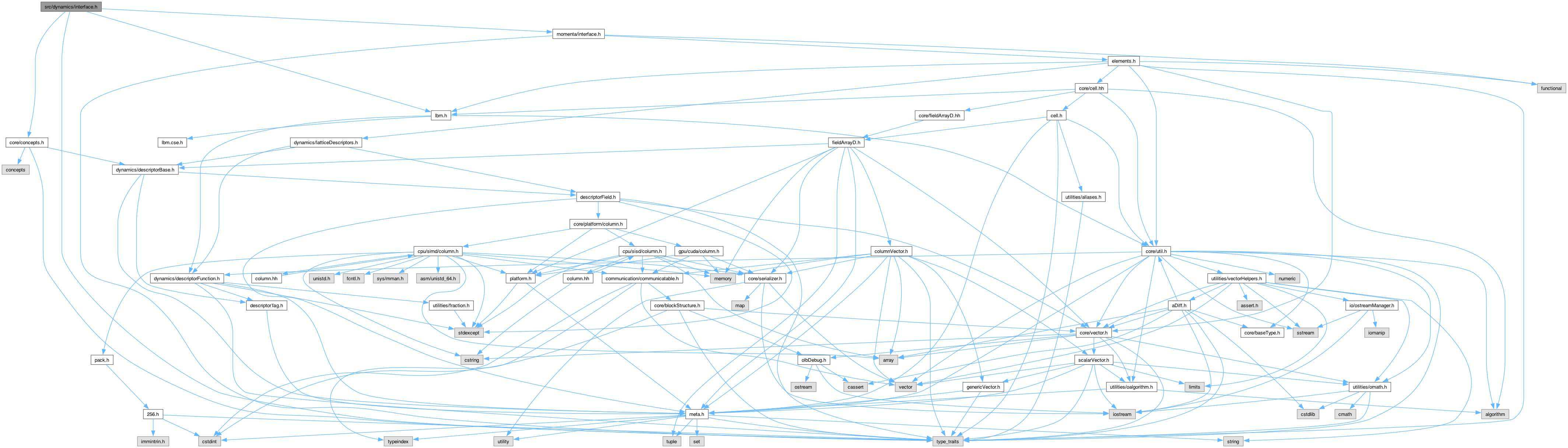
 Include dependency graph for interface.h:
Include dependency graph for interface.h: