|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
Top level namespace for all of OpenLB. More...
Namespaces | |
| namespace | boundaryhelper |
| namespace | collision |
| namespace | concepts |
| namespace | contact |
| namespace | cpu |
| Implementations of CPU specifics. | |
| namespace | descriptors |
| Descriptors for the 2D and 3D lattices. | |
| namespace | dynamics |
| namespace | equilibria |
| namespace | fd |
| namespace | forcing |
| Dynamics combination rules for various forcing schemes. | |
| namespace | FreeSurface |
| namespace | functor_dsl |
| Helper functions for building functors via composition. | |
| namespace | gpu |
| Implementations of GPU specifics. | |
| namespace | graphics |
| namespace | guoZhao |
| namespace | heatmap |
| namespace | interaction |
| namespace | legacy |
| namespace | meta |
| namespace | momenta |
| namespace | names |
| Define names as empty structs in order to enable calls like lattice(NavierStokes()). | |
| namespace | opti |
| All optimization code is contained in this namespace. | |
| namespace | parameters |
| namespace | particles |
| namespace | powerlaw |
| namespace | sdf |
| namespace | singleton |
| namespace | stage |
| namespace | statistics |
| namespace | TotalEnthalpy |
| namespace | util |
| namespace | utilities |
Classes | |
| struct | AbstractBlockO |
| Base of any block operator. More... | |
| struct | AbstractCollisionO |
| Base of collision operations performed by BlockDynamicsMap. More... | |
| struct | AbstractColumn |
| Abstract declarator of Column-like storage. More... | |
| struct | AbstractCouplingO |
| Base of block-wide coupling operators executed by SuperLatticeCoupling. More... | |
| struct | AbstractCyclicColumn |
| Abstract declarator of cyclic Column-like storage. More... | |
| struct | AbstractedConcreteParameters |
| Abstract base of ConcreteParametersD. More... | |
| class | AbstractFieldArrayD |
| Platform-agnostic interface to concrete host-side field arrays. More... | |
| struct | AbstractParameters |
| Dynamic access interface for FIELD-valued parameters. More... | |
| class | AdeUnitConverter |
| class | AdeUnitConverterFromResolutionAndLatticeVelocity |
| class | AdeUnitConverterFromResolutionAndRelaxationTime |
| class | AdsorptionConverter |
| class | AdsorptionConverterFromSchmidtNumberAndRelaxation |
| class | AdsorptionCouplingPostProcessor3D |
| Coupling post processor for adsorption on moving particles. More... | |
| class | AdsorptionCouplingPostProcessorGenerator3D |
| Generates post processor AdsorptionCouplingPostProcessor3D. More... | |
| class | AdsorptionFullCouplingPostProcessor3D |
| class | AdsorptionFullCouplingPostProcessorGenerator3D |
| class | AdsorptionReaction |
| Describes adsorption reactions in conjunction with a Isotherm class. More... | |
| class | AdvDiffBuoyancyForce3D |
| class | AdvDiffDragForce3D |
| class | AdvDiffMagneticWireForce3D |
| class | AdvDiffRotatingForce3D |
| class | AdvDiffSNDragForce3D |
| struct | AdvectionDiffusionBoundariesDynamics |
| struct | AdvectionDiffusionCornerDynamics2D |
| struct | AdvectionDiffusionCornerDynamics3D |
| class | AdvectionDiffusionEdgesDynamics |
| struct | AdvectionDiffusionExternalVelocityCollision |
| class | AdvectionDiffusionForce3D |
| class | AdvectionDiffusionParticleCouplingGenerator3D |
| class | AdvectionDiffusionParticleCouplingPostProcessor3D |
| class | AggParticle3D |
| class | AnalyticalComposed |
| class | AnalyticalConcatenation |
| class | AnalyticalConst |
| AnalyticalConst: DD -> XD, where XD is defined by value.size() More... | |
| class | AnalyticalCuboidwiseConst |
| Returns a constant value on every cuboids. More... | |
| class | AnalyticalDerivativeAD |
| class | AnalyticalDerivativeAD1D |
| Class for AD Differentiation of 1-dim Functor F: S -> T. More... | |
| class | AnalyticalDerivativeFD1D |
| Class for computing the derivative of a given 1D functor with a finite difference. More... | |
| class | AnalyticalF |
| AnalyticalF are applications from DD to XD, where X is set by the constructor. More... | |
| class | AnalyticalFfromBlockF2D |
| Converts block functors to analytical functors. More... | |
| class | AnalyticalFfromBlockF3D |
| Converts block functors to analytical functors. More... | |
| class | AnalyticalFfromIndicatorF3D |
| Converts IndicatorF to AnalyticalF (used for Analytical operands for Identity) More... | |
| class | AnalyticalFfromSuperF2D |
| Converts super functions to analytical functions. More... | |
| class | AnalyticalFfromSuperF3D |
| Converts super functors to analytical functors. More... | |
| class | AnalyticalIdentity |
| AnalyticalIdentity stores vectors, result of addition,multiplication, ... More... | |
| class | AnalyticalLinear1D |
| AnalyticalLinear1D: 1D -> 1D troughout given points (x0,v0) and (x1,v1) More... | |
| class | AnalyticalLinear2D |
| AnalyticalLinear2D: 2D -> 1D troughout given points (x0,y0,v0), (x1,y1,v1), (x2,y2,v2) More... | |
| class | AnalyticalLinear3D |
| 3D//////////////////////////////////////////// AnalyticalLinear3D: 3D -> 1D troughout given points (x0,y0,z0,v0), (x1,y1,z1,v1), (x2,y2,z2,v2), (x3,y3,z3,v3) More... | |
| class | AnalyticalNormal |
| AnalyticalNormal: DD -> XD, where XD is defined by value.size() More... | |
| class | AnalyticalParticleAdsorptionLinear2D |
| AnalyticalRandom2D: 2D -> 1D with maxValue in the center decreasing linearly with the distrance to the center to zero at the radius and zero outside. More... | |
| class | AnalyticalPorosityVolumeF |
| class | AnalyticalPorousVelocity2D |
| Analytical solution of porous media channel flow with low Reynolds number See Spaid and Phelan (doi:10.1063/1.869392) More... | |
| class | AnalyticalPorousVelocity3D |
| Analytical solution of porous media channel flow with low Reynolds number See Spaid and Phelan (doi:10.1063/1.869392) More... | |
| class | AnalyticalRandomBase |
| AnalyticalRandomBase: virtual base class for all the random functionals. More... | |
| class | AnalyticalRandomNormal |
| AnalyticalRandomNormal: DD -> 1D with random image in (0,1) More... | |
| class | AnalyticalRandomOld |
| AnalyticalRandomOld: DD -> 1D with random image in (0,1) More... | |
| class | AnalyticalRandomSeededBase |
| AnalyticalRamdomSeededBase: alternative version with seed specification. More... | |
| class | AnalyticalRandomSeededNormal |
| AnalyticalRamdomSeededNormal: alternative version with seed specification. More... | |
| class | AnalyticalRandomTruncatedNormal |
| AnalyticalRandomNormal: DD -> 1D with random image in (0,1) Normal distribution cut off outside [mean-n*stdDev, mean+n*stdDev]. More... | |
| class | AnalyticalRandomUniform |
| AnalyticalRandomUniform: DD -> 1D with random image in (0,1) More... | |
| class | AnalyticalScaled3D |
| AnalyticalScaled3D: 3D -> Image(AnalyticalF) scales AnalyticalF by _scale. More... | |
| class | AnalyticalSmoothedSquareWave |
| Smoothed square wave. epsilon = width of the mollified interval. More... | |
| class | AnalyticalSquare1D |
| represents an inverse parabola profile like it is used in Poiseuille inflow note: output depends only on first parameter, maps 1D,2D,3D->1D More... | |
| class | AnalyticalSquareWave |
| Square wave with given period length, amplitude, difference (= length of positive time / length of period) More... | |
| class | AnalyticalTypecast |
| Perform explicit typecast for the arguments and results of functor. More... | |
| class | AnalyticalVelocityVolumeF |
| class | AnalyticalWindProfileF3D |
| class | AnalyticCalcF |
| arithmetic helper class for analytical functors More... | |
| class | AngleBetweenVectors3D |
| This class calculates the angle alpha between vector _referenceVector and any other vector x. More... | |
| class | AntiBounceBackPostProcessor2D |
| class | AntiBounceBackPostProcessorGenerator2D |
| class | AnyFieldType |
| Helper for referring to arbitrary data instances. More... | |
| struct | Array |
| Describe FieldArray of a FIELD in Data. More... | |
| struct | AXIS_DIRECTION |
| class | BackCouplingModel |
| Abstact base class for BaseBackCouplingModel. More... | |
| class | Base64Decoder |
| class | Base64Encoder |
| class | BaseBackCouplingModel |
| Abstact class for all the back-coupling models, viz., momentum coupling from particle to fluid. More... | |
| class | BaseForwardCouplingModel |
| Abstact base class for all the local/non-local forward-coupling models. More... | |
| class | BaseLocalBackCouplingModel |
| Abstact class for all the local back-coupling models. More... | |
| class | BaseNonLocalBackCouplingModel |
| Abstact class for all the non-local back-coupling models. More... | |
| class | BaseSolver |
| BaseSolver implements the solving process of an instationary simulation, consisting of preSimulationTasks, time-stepping and postprocessing. More... | |
| class | BaseVTIreader |
| class | BaseVTIreader3D |
| class | batteryCouplingGenerator2D |
| class | batteryCouplingPostProcessor2D |
| Coupling of ADlattice[0] with the other AD lattices (tpartners) More... | |
| class | BlockAverage2D |
| BlockAverage2D returns the average in each component of f on a indicated subset. More... | |
| class | BlockAverage3D |
| BlockAverage3D returns the average in each component of f on a indicated subset. More... | |
| class | BlockCalcF2D |
| Block level arithmetic operations for BlockF2D functors. More... | |
| class | BlockCalcF3D |
| Block level arithmetic operations for BlockF3D functors. More... | |
| struct | BlockCollisionO |
| Collision operation on concrete blocks of PLATFORM. More... | |
| class | BlockCommunicationNeighborhood |
| Configurable overlap communication neighborhood of a block. More... | |
| struct | BlockCommunicator |
| Generic communicator for the overlap neighborhood of a block. More... | |
| class | BlockData |
| class | BlockData3D |
| class | BlockDataF2D |
| BlockDataF2D can store data of any BlockFunctor2D. More... | |
| class | BlockDataF3D |
| BlockDataF3D can store data of any BlockFunctor3D. More... | |
| class | BlockDiscretizationF2D |
| Block functor for discretizing values by an interval (bottomBoundary,topBoundary), as well as restricting the value by setting n equal-distributed points and rounding the value to the nearest point If n = 1, there won't be restricting, and for n>=1 there will be n-1 restricting points. More... | |
| class | BlockDiscretizationF3D |
| Block functor for discretizing values by an interval (bottomBoundary,topBoundary), as well as restricting the value by setting n equal-distributed points and rounding the value to the nearest point If n = 1, there won't be restricting, and for n>=1 there will be n-1 restricting points. More... | |
| class | BlockDynamicsMap |
| Map between cell indices and concrete dynamics. More... | |
| class | BlockEuklidNorm2D |
| BlockL2Norm2D returns pointwise the l2-norm, e.g. of a velocity. More... | |
| class | BlockEuklidNorm3D |
| functor returns pointwise the l2-norm, e.g. of a velocity More... | |
| class | BlockExtractComponentF2D |
| functor to extract one component More... | |
| class | BlockExtractComponentF3D |
| functor to extract one component More... | |
| class | BlockExtractComponentIndicatorF2D |
| functor to extract one component inside an indicator More... | |
| class | BlockExtractComponentIndicatorF3D |
| functor to extract one component inside an indicator More... | |
| class | BlockExtractIndicatorF2D |
| functor to extract data inside an indicator More... | |
| class | BlockExtractIndicatorF3D |
| functor to extract data inside an indicator More... | |
| class | BlockF2D |
| represents all functors that operate on a cuboid in general, mother class of BlockLatticeF, .. More... | |
| class | BlockF3D |
| represents all functors that operate on a cuboid in general, mother class of BlockLatticeF, .. More... | |
| class | BlockFiniteDifference3D |
| functor to get pointwise finite difference Dissipation on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | BlockGeometry |
| Representation of a block geometry. More... | |
| class | BlockGeometryFaces2D |
| class | BlockGeometryFaces3D |
| class | BlockGeometryFacesIndicator2D |
| class | BlockGeometryFacesIndicator3D |
| class | BlockGeometryStatistics2D |
| class | BlockGeometryStatistics3D |
| class | BlockGifWriter |
| BlockGifWriter writes given functor data to image file of format .ppm. More... | |
| class | BlockIdentity2D |
| identity functor More... | |
| class | BlockIdentity3D |
| identity functor More... | |
| class | BlockIndicatorBoundaryNeighbor2D |
| Block indicator identifying neighbors of boundary cells. More... | |
| class | BlockIndicatorBoundaryNeighbor3D |
| Block indicator identifying neighbors of boundary cells. More... | |
| class | BlockIndicatorF2D |
| Base block indicator functor (discrete) More... | |
| class | BlockIndicatorF3D |
| Base block indicator functor. More... | |
| class | BlockIndicatorFfromIndicatorF2D |
| BlockIndicatorF2D from IndicatorF2D. More... | |
| class | BlockIndicatorFfromIndicatorF3D |
| BlockIndicatorF3D from IndicatorF3D. More... | |
| class | BlockIndicatorFfromSmoothIndicatorF2D |
| BlockIndicatorF2D from SmoothIndicatorF2D. More... | |
| class | BlockIndicatorFfromSmoothIndicatorF3D |
| BlockIndicatorF3D from SmoothIndicatorF3D. More... | |
| class | BlockIndicatorIdentity2D |
| Block indicator identity. More... | |
| class | BlockIndicatorIdentity3D |
| Block indicator identity. More... | |
| class | BlockIndicatorLayer3D |
| Block indicator extended by a layer. More... | |
| class | BlockIndicatorMaterial2D |
| Block indicator functor from material numbers. More... | |
| class | BlockIndicatorMaterial3D |
| Block indicator functor from material numbers. More... | |
| class | BlockIndicatorMultiplication3D |
| Block indicator intersection. More... | |
| class | BlockIntegral2D |
| BlockIntegral2D integrates f on a indicated subset. More... | |
| class | BlockIntegral3D |
| BlockIntegral3D integrates f on a indicated subset. More... | |
| class | BlockIsotropicHomogeneousTKE3D |
| functor that returns pointwise the turbulent, kinetic energy More... | |
| class | BlockL1Norm2D |
| class | BlockL1Norm3D |
| BlockL1Norm3D returns componentwise the l1 norm. More... | |
| class | BlockL222D |
| BlockL223D returns componentwise the squared l2-norm. More... | |
| class | BlockL223D |
| BlockL223D returns componentwise the squared l2-norm. More... | |
| class | BlockLaplacian3D |
| functor to get pointwise finite difference Laplacian operator More... | |
| class | BlockLattice |
| Platform-abstracted block lattice for external access and inter-block interaction. More... | |
| class | BlockLatticeAverage2D |
| BlockLatticeAverage2D returns pointwise local average of a passed functor with a given material and radius on local lattice. More... | |
| class | BlockLatticeCellList |
| class | BlockLatticeCoords2D |
| BlockLatticeCoords2D returns pointwise density rho on local lattices. More... | |
| class | BlockLatticeCoords3D |
| BlockLatticeCoords3D returns pointwise density rho on local lattices. More... | |
| class | BlockLatticeCuboid2D |
| BlockLatticeCuboid2D returns pointwise the cuboid no. + 1 on local lattice. More... | |
| class | BlockLatticeCuboid3D |
| functor to get pointwise the cuboid no. + 1 on local lattice More... | |
| class | BlockLatticeDensity2D |
| BlockLatticeDensity2D returns pointwise density rho on local lattices. More... | |
| class | BlockLatticeDensity3D |
| functor returns pointwise density rho on local lattices More... | |
| class | BlockLatticeDiscreteNormal2D |
| BlockLatticeDiscreteNormal2D returns pointwise the discrete normal vector of the local lattice boundary cells. More... | |
| class | BlockLatticeDiscreteNormal3D |
| BlockLatticeDiscreteNormal3D returns pointwise the discrete normal vector of the local lattice boundary cells. More... | |
| class | BlockLatticeDiscreteNormalType2D |
| BlockLatticeDiscreteNormalType2D returns pointwise the type of a discrete normal vector. More... | |
| class | BlockLatticeDiscreteNormalType3D |
| BlockLatticeDiscreteNormalType3D returns pointwise the type of a discrete normal vector. More... | |
| class | BlockLatticeDissipation3D |
| functor returns pointwise dissipation density on local lattices More... | |
| class | BlockLatticeDissipationFD3D |
| class | BlockLatticeEul2LagrDensity3D |
| functor returns pointwise external field for Lagrangian particle density, converted to Eulerian More... | |
| class | BlockLatticeExternal2D |
| BlockLatticeExternal2D returns pointwise density rho on local lattices. More... | |
| class | BlockLatticeExternal3D |
| BlockLatticeExternal3D returns pointwise density rho on local lattices. More... | |
| class | BlockLatticeExternalScalarField2D |
| BlockLatticeExternalScalarField2D returns pointwise density rho on local lattices. More... | |
| class | BlockLatticeExternalScalarField3D |
| functor returns pointwise density rho on local lattices More... | |
| class | BlockLatticeExternalVelocity3D |
| functor returns pointwise external velocity (external field) on local lattice More... | |
| class | BlockLatticeExternalVelocityGradientFD3D |
| class | BlockLatticeF2D |
| represents all functors that operate on a DESCRIPTOR in general, e.g. getVelocity(), getForce(), getPressure() More... | |
| class | BlockLatticeF3D |
| represents all functors that operate on a DESCRIPTOR in general, e.g. getVelocity(), getForce(), getPressure() More... | |
| class | BlockLatticeFfromAnalyticalF2D |
| Block level functor for conversion of analytical to lattice functors. More... | |
| class | BlockLatticeFfromAnalyticalF3D |
| Block level functor for conversion of analytical to lattice functors. More... | |
| class | BlockLatticeField2D |
| class | BlockLatticeField3D |
| functor to get pointwise, lattice-dependent external field More... | |
| class | BlockLatticeFlux3D |
| functor returns pointwise lattice flux on local lattice More... | |
| class | BlockLatticeFpop3D |
| functor returns pointwise f population on local lattices More... | |
| class | BlockLatticeGeometry2D |
| BlockLatticeGeometry2D returns pointwise the material no. presenting the geometry on local lattice. More... | |
| class | BlockLatticeGeometry3D |
| functor returns pointwise the material no. presenting the geometry on local lattice More... | |
| class | BlockLatticeHighOrderKnudsen3D |
| class | BlockLatticeIdentity2D |
| identity functor More... | |
| class | BlockLatticeIdentity3D |
| identity functor More... | |
| class | BlockLatticeIndicatorSmoothIndicatorIntersection2D |
| functor that returns 1 if SmoothIndicatorF A intersects IndicatorF B; otherwise, 0 More... | |
| class | BlockLatticeIndicatorSmoothIndicatorIntersection3D |
| functor that returns 1 if SmoothIndicatorF A intersects IndicatorF B; otherwise, 0 More... | |
| class | BlockLatticeInterpDensity3Degree3D |
| class | BlockLatticeInterpPhysVelocity2D |
| class | BlockLatticeInterpPhysVelocity3D |
| class | BlockLatticeInterpPhysVelocity3Degree3D |
| class | BlockLatticeKineticEnergy3D |
| functor returns pointwise velocity on local lattice More... | |
| class | BlockLatticeKnudsen2D |
| class | BlockLatticeKnudsen3D |
| class | BlockLatticeMomentumExchangeForce |
| Functor that returns forces acting on a particle surface, returns data in output for every particle in a row(described are return values for the first particle). More... | |
| class | BlockLatticeMomentumExchangeForceLocal |
| functor to get pointwise momentum exchange on local lattice (block level) More... | |
| class | BlockLatticePhysBoundaryDistance3D |
| functor returns pointwise minimum distance to boundary given by indicators More... | |
| class | BlockLatticePhysBoundaryForce2D |
| BlockLatticePhysBoundaryForce2D returns pointwise phys force acting on a boundary. More... | |
| class | BlockLatticePhysBoundaryForce3D |
| functor returns pointwise phys force acting on a boundary with a given material on local lattice More... | |
| class | BlockLatticePhysCorrBoundaryForce2D |
| functor returns pointwise phys force acting on a indicated boundary on local lattice see: Caiazzo, Junk: Boundary Forces in lattice Boltzmann: Analysis of MEA More... | |
| class | BlockLatticePhysCorrBoundaryForce3D |
| functor returns pointwise phys force acting on a indicated boundary on local lattice see: Caiazzo, Junk: Boundary Forces in lattice Boltzmann: Analysis of MEA More... | |
| class | BlockLatticePhysCorrDrag2D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | BlockLatticePhysCorrDrag3D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | BlockLatticePhysCroppedPermeability3D |
| functor to get pointwise mesh-independent permeability values in (0,inf) in combination with (Extended)PorousBGKdynamics note: result is cropped to 1 More... | |
| class | BlockLatticePhysDarcyForce2D |
| BlockLatticePhysDarcyForce2D computes pointwise -nu/K*u on the lattice. can be used with BlockSum2D as objective. More... | |
| class | BlockLatticePhysDarcyForce3D |
| functor returns pointwise -nu/K*u on the lattice, can be used with BlockSum3D as objective More... | |
| class | BlockLatticePhysDissipation2D |
| BlockLatticePhysDissipation2D returns pointwise physical dissipation density on local lattices. More... | |
| class | BlockLatticePhysDissipation3D |
| functor returns pointwise dissipation density on local lattices More... | |
| class | BlockLatticePhysDissipationFD3D |
| class | BlockLatticePhysDrag2D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | BlockLatticePhysDrag3D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | BlockLatticePhysEffectiveDissipation3D |
| functor returns pointwise turbulent dissipation density on local lattices More... | |
| class | BlockLatticePhysEffectiveDissipationFD3D |
| class | BlockLatticePhysEnstrophyFD3D |
| functor that returns pointwise the enstrophy More... | |
| class | BlockLatticePhysExternalParticleVelocity2D |
| class | BlockLatticePhysExternalParticleVelocity3D |
| class | BlockLatticePhysExternalPorosity2D |
| class | BlockLatticePhysExternalPorosity3D |
| class | BlockLatticePhysExternalScalar2D |
| class | BlockLatticePhysExternalScalar3D |
| class | BlockLatticePhysExternalVelocity2D |
| class | BlockLatticePhysExternalVelocity3D |
| class | BlockLatticePhysExternalZeta2D |
| Zeta-Field (Geng2019) More... | |
| class | BlockLatticePhysF2D |
| represents all functors that operate on a DESCRIPTOR with output in Phys, e.g. physVelocity(), physForce(), physPressure() More... | |
| class | BlockLatticePhysF3D |
| represents all functors that operate on a DESCRIPTOR with output in Phys, e.g. physVelocity(), physForce(), physPressure() More... | |
| class | BlockLatticePhysHeatFlux2D |
| BlockLatticePhysHeatFlux2D returns pointwise phys heat flux on local lattice. More... | |
| class | BlockLatticePhysHeatFlux3D |
| BlockLatticePhysHeatFlux3D returns pointwise phys heat flux on local lattice. More... | |
| class | BlockLatticePhysHeatFluxBoundary3D |
| functor returns pointwise phys heat flux on a boundary with a given material on local lattice More... | |
| class | BlockLatticePhysPermeability2D |
| BlockLatticePhysPermeability2D returns pointwise mesh-independent permeability values in (0,inf) in combination with (Extended)PorousBGKdynamics note: result is cropped to 999999. More... | |
| class | BlockLatticePhysPermeability3D |
| functor to get pointwise mesh-independent permeability values in (0,inf) in combination with (Extended)PorousBGKdynamics note: result is cropped to 999999 More... | |
| class | BlockLatticePhysPoreSizeDistribution3D |
| functor returns pointwise pore radius for packings of spheres given by indicators returns NAN for non-pore voxels More... | |
| class | BlockLatticePhysPressure2D |
| BlockLatticePhysPressure2D returns pointwise phys pressure from rho on local lattices. More... | |
| class | BlockLatticePhysPressure3D |
| functor returns pointwise phys pressure from rho on local lattices More... | |
| class | BlockLatticePhysShearRateMag3D |
| functor returns pointwise phys shear rate magnitude on local lattice More... | |
| class | BlockLatticePhysStrainRate2D |
| BlockLatticePhysStrainRate2D returns pointwise phys strain rate on local lattice. More... | |
| class | BlockLatticePhysStrainRate3D |
| functor returns pointwise phys strain rate on local lattice, s_ij = 1/2*(du_idr_j + du_jdr_i) More... | |
| class | BlockLatticePhysStrainRateFD3D |
| class | BlockLatticePhysStressFD3D |
| class | BlockLatticePhysTauFromBoundaryDistance3D |
| functor returns pointwise pore radius for packings of spheres given by indicators returns NAN for non-pore voxels More... | |
| class | BlockLatticePhysTemperature2D |
| BlockLatticePhysTemperature2D returns pointwise phys temperature from rho on local lattices. More... | |
| class | BlockLatticePhysTemperature3D |
| class | BlockLatticePhysVelocity2D |
| BlockLatticePhysVelocity2D returns pointwise phys velocity on local lattice. More... | |
| class | BlockLatticePhysVelocity3D |
| functor returns pointwise phys velocity on local lattice More... | |
| class | BlockLatticePhysVelocityGradientFD3D |
| class | BlockLatticePhysViscosity2D |
| functor returns pointwise phys viscosity on local lattices More... | |
| class | BlockLatticePhysViscosity3D |
| functor returns pointwise phys viscosity on local lattices More... | |
| class | BlockLatticePhysVorticityFD3D |
| class | BlockLatticePhysWallShearStress2D |
| BlockLatticePhysBoundaryForce2D returns pointwise wall shear stress. More... | |
| class | BlockLatticePhysWallShearStress3D |
| functor returns pointwise phys wall shear stress acting on a boundary with a given material on local lattice More... | |
| struct | BlockLatticePlatform |
| class | BlockLatticePorosity2D |
| BlockLatticePorosity2D returns pointwise, lattice-dependent porosity values in [0,1] in combination with (Extended)PorousBGKdynamics: 0->solid, 1->fluid. More... | |
| class | BlockLatticePorosity3D |
| functor returns pointwise, lattice-dependent porosity values in [0,1] in combination with (Extended)PorousBGKdynamics: 0->solid, 1->fluid More... | |
| class | BlockLatticePSMPhysForce2D |
| functor returns pointwise phys force for PSM dynamics More... | |
| class | BlockLatticePSMPhysForce2DMod |
| functor returns pointwise phys force for PSM dynamics More... | |
| class | BlockLatticePSMPhysForce3D |
| functor returns pointwise phys force for PSM dynamics More... | |
| class | BlockLatticeRank2D |
| BlockLatticeRank2D returns pointwise the rank no. + 1 on local lattice. More... | |
| class | BlockLatticeRank3D |
| functor to get pointwise the rank no. + 1 on local lattice More... | |
| class | BlockLatticeRefinementMetricKnudsen2D |
| class | BlockLatticeRefinementMetricKnudsen3D |
| class | BlockLatticeSmoothDiracDelta3D |
| class | BlockLatticeSTLreader |
| class | BlockLatticeStokesDragForce |
| class | BlockLatticeStrainRate2D |
| BlockLatticeStrainRate2D returns pointwise strain rate on local lattice. More... | |
| class | BlockLatticeStrainRate3D |
| functor returns pointwise strain rate on local lattice, s_ij = 1/2*(du_idr_j + du_jdr_i) More... | |
| class | BlockLatticeStrainRateFD3D |
| class | BlockLatticeStructure2D |
| An interface to all the variants of (more or less) regular lattices. More... | |
| class | BlockLatticeStructure3D |
| BlockLatticeStructure3D is a interface class for defining dynamics on a BlockStructure3D. More... | |
| class | BlockLatticeThermalComfort3D |
| BlockLatticeThermalComfort3D returns pointwise PMV and PPD on local lattice. More... | |
| class | BlockLatticeThermalPhysF2D |
| represents all thermal functors that operate on a DESCRIPTOR with output in Phys, e.g. physTemperature(), physHeatFlux() More... | |
| class | BlockLatticeThermalPhysF3D |
| represents all thermal functors that operate on a DESCRIPTOR with output in Phys, e.g. physTemperature(), physHeatFlux() More... | |
| class | BlockLatticeTimeStepScale3D |
| functor to scale particle distributions to a time step More... | |
| class | BlockLatticeVelocity2D |
| BlockLatticeVelocity2D returns pointwise velocity on local lattices. More... | |
| class | BlockLatticeVelocity3D |
| functor returns pointwise velocity on local lattice More... | |
| class | BlockLatticeVelocityDenominator3D |
| class | BlockLatticeVelocityGradientFD3D |
| functor to get pointwise explicit filtering on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | BlockLatticeVolumeFractionApproximation2D |
| functor returns pointwise an approximation for the volume fraction More... | |
| class | BlockLatticeVolumeFractionApproximation3D |
| functor returns pointwise an approximation for the volume fraction More... | |
| class | BlockLatticeVolumeFractionPolygonApproximation2D |
| functor returns pointwise an approximation for the volume fraction More... | |
| class | BlockLatticeVorticityFD3D |
| class | BlockLoadBalancer |
| class | BlockLocalAverage2D |
| Averages given functor inside the local sphere. More... | |
| class | BlockLocalAverage3D |
| Averages given functor inside the local sphere. More... | |
| class | BlockLpNorm2D |
| Block level functor that returns the Lp norm over omega of the euklid norm of the input block functor. More... | |
| class | BlockLpNorm3D |
| Block level functor that returns the Lp norm over omega of the euklid norm of the input block functor. More... | |
| class | BlockMax2D |
| BlockMax2D returns the max in each component of f on a indicated subset. More... | |
| class | BlockMax3D |
| BlockMax3D returns the max in each component of f on a indicated subset. More... | |
| class | BlockMin2D |
| BlockMin2D returns the min in each component of f on a indicated subset. More... | |
| class | BlockMin3D |
| BlockMin3D returns the min in each component of f on a indicated subset. More... | |
| struct | BlockO |
| Base of block-wide operators such as post processors. More... | |
| class | BlockPhysFiniteDifference3D |
| class | BlockPhysLaplacian3D |
| functor to get pointwise finite difference Laplacian operator More... | |
| class | BlockPostProcessorMap |
| Map of post processors of a single priority and stage. More... | |
| class | BlockReduction2D1D |
| BlockReduction2D1D reduces the data of a SuperF2D functor to the intersection between a given 2D hyperplane and the super geometry. More... | |
| class | BlockReduction2D2D |
| BlockReduction2D2D interpolates the data of a SuperF2D functor in a given resolution. More... | |
| class | BlockReduction3D2D |
| BlockReduction3D2D reduces the data of a SuperF3D functor to the intersection between a given hyperplane and the super geometry. More... | |
| class | BlockRoundingF2D |
| Block functor for rounding the value in a certain mode: None := No rounding NearestInteger := rounding to nearest integer Floor:= rounding to nearest lower integer Ceil := rounding to nearest higher integer. More... | |
| class | BlockRoundingF3D |
| Block functor for rounding the value in a certain mode: None := No rounding NearestInteger := rounding to nearest integer Floor:= rounding to nearest lower integer Ceil := rounding to nearest higher integer. More... | |
| class | BlockStdDeviationF3D |
| BlockStdDeviationF3D returns the Deviation in each component of f on a indicated subset calcutalted with Steiner translation theorem. More... | |
| class | BlockStructure2D |
| class | BlockStructureD |
| Base of a regular block. More... | |
| class | BlockSum2D |
| BlockSum2D sums all components of f over a indicated subset. More... | |
| class | BlockSum3D |
| BlockSum3D sums all components of f over a indicated subset. More... | |
| class | BlockTypecastF3D |
| perform explicit typecast from output type T2 to T More... | |
| class | BlockVarianceF3D |
| BlockVarianceF3D returns the Variance in each component of f on a indicated subset calcutalted with Steiner translation theorem. More... | |
| class | BlockVTIreader3D |
| class | BlockVTKwriter2D |
| BlockVTKwriter2D writes any BLockF2D to vtk-based output files. More... | |
| class | BlockVTKwriter3D |
| BlockVTKwriter3D writes any BLockF3D to vtk-based output files. More... | |
| class | Boundary3D |
| Prototype for all particle boundaries. More... | |
| struct | BoundaryHelpers |
| All boundary helper functions are inside this structure. More... | |
| class | BoundaryStreamPostProcessor2D |
| class | BoundaryStreamPostProcessorGenerator2D |
| class | BouzidiAdeDirichletPostProcessor |
| class | BouzidiPostProcessor |
| Post processor for the zero-velocity Bouzidi boundary. More... | |
| class | BouzidiVelocityPostProcessor |
| Post processor for the velocity Bouzidi boundary. More... | |
| class | BufferSerializable |
| Base class for serializable objects of dynamic size More... | |
| class | BuoyancyForce3D |
| class | CarnahanStarling |
| class | CartesianToCylinder3D |
| This class converts Cartesian coordinates of point x to cylindrical coordinates wrote into output field (output[0] = radius, output[1] = phi, output[2] = z). More... | |
| class | CartesianToPolar2D |
| This class converts Cartesian coordinates of point x to polar coordinates wrote into output field (output[0] = radius>= 0, output[1] = phi in [0, 2Pi). More... | |
| class | CartesianToSpherical3D |
| This class converts Cartesian coordinates of point x to spherical coordinates wrote into output field (output[0] = radius, output[1] = phi, output[2] = theta). More... | |
| class | Cell |
| Highest-level interface to Cell data. More... | |
| class | CellD |
| Single cell implementing the full field data interface. More... | |
| class | CellIndexListD |
| List of cell indices and associated field data. More... | |
| struct | CellStatistic |
| Return value of any collision. More... | |
| struct | CellStatistic< cpu::simd::Pack< T > > |
| struct | ChemicalPotentialCoupling2D |
| struct | ChemicalPotentialCoupling3D |
| class | CirclePoiseuille3D |
| Velocity profile for util::round pipes and a laminar flow of a Newtonian fluid: u(r)=u_max*(1-(r/R)^2) More... | |
| class | CirclePoiseuilleStrainRate3D |
| Strain rate for util::round pipes and laminar flow of a Newtonian fluid. More... | |
| class | CirclePowerLaw3D |
| This functor returns a quadratic Poiseuille profile for use with a pipe with util::round cross-section. More... | |
| class | CirclePowerLawTurbulent3D |
| Velocity profile for util::round pipes and turbulent flows: u(r)=u_max*(1-r/R)^(1/n) The exponent n can be calculated by n = 1.03 * ln(Re) - 3.6 n=7 is used for many flow applications. More... | |
| class | CLIreader |
| Very simple CLI argument parser. More... | |
| struct | CollisionSubdomainMask |
| Mask describing the subdomain on which to apply the collision step. More... | |
| class | ColumnVector |
| Vector of columns. More... | |
| struct | ColumnVectorBase |
| Base of all ColumnVector specializations. More... | |
| class | CombinedAdvectionDiffusionRLBdynamics |
| class | CombinedRLBdynamics |
| Regularized BGK collision followed by any other Dynamics. More... | |
| struct | Communicatable |
| class | Communicator2D |
| class | Communicator3D |
| class | ComposedSuperLatticeF3D |
| class | ConcentrationAdvectionDiffusionCouplingGenerator2D |
| class | ConcentrationAdvectionDiffusionCouplingGenerator3D |
| class | ConcentrationAdvectionDiffusionCouplingPostProcessor2D |
| Coupling of ADlattice[0] with the other AD lattices (tpartners) More... | |
| class | ConcentrationAdvectionDiffusionCouplingPostProcessor3D |
| Coupling of ADlattice[0] with the other AD lattices (tpartners) More... | |
| class | ConcreteBlockCollisionO |
| Collision operation of concrete DYNAMICS on concrete block lattices of PLATFORM. More... | |
| class | ConcreteBlockCollisionO< T, DESCRIPTOR, Platform::CPU_SIMD, DYNAMICS > |
| Application of the collision step on a concrete SIMD block. More... | |
| class | ConcreteBlockCollisionO< T, DESCRIPTOR, Platform::CPU_SISD, DYNAMICS > |
| Application of the collision step on a concrete SISD block. More... | |
| class | ConcreteBlockCollisionO< T, DESCRIPTOR, Platform::GPU_CUDA, DYNAMICS > |
| Application of the collision step on a concrete CUDA block. More... | |
| class | ConcreteBlockCommunicator |
| class | ConcreteBlockCommunicator< ConcreteBlockLattice< T, DESCRIPTOR, PLATFORM > > |
| class | ConcreteBlockCommunicator< ConcreteBlockLattice< T, DESCRIPTOR, Platform::GPU_CUDA > > |
| class | ConcreteBlockCouplingO |
| Coupling of COUPLEES using concrete OPERATOR with SCOPE on PLATFORM lattices. More... | |
| class | ConcreteBlockCouplingO< COUPLEES, PLATFORM, COUPLER, OperatorScope::PerCell > |
| class | ConcreteBlockCouplingO< COUPLEES, PLATFORM, COUPLER, OperatorScope::PerCellWithParameters > |
| class | ConcreteBlockCouplingO< COUPLEES, Platform::GPU_CUDA, COUPLER, OperatorScope::PerCell > |
| Application of a block-wise COUPLER on concrete CUDA COUPLEES. More... | |
| class | ConcreteBlockCouplingO< COUPLEES, Platform::GPU_CUDA, COUPLER, OperatorScope::PerCellWithParameters > |
| Application of a block-wise COUPLER on concrete CUDA COUPLEES with parameters. More... | |
| class | ConcreteBlockLattice |
| Implementation of BlockLattice on a concrete PLATFORM. More... | |
| class | ConcreteBlockMask |
| class | ConcreteBlockMask< T, Platform::CPU_SIMD > |
| class | ConcreteBlockMask< T, Platform::CPU_SISD > |
| class | ConcreteBlockMask< T, Platform::GPU_CUDA > |
| class | ConcreteBlockO |
| Block application of concrete OPERATOR called using SCOPE on PLATFORM. More... | |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::CPU_SIMD, OPERATOR, OperatorScope::PerBlock > |
| Application of a block-wise OPERATOR on a concrete vector CPU block. More... | |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::CPU_SIMD, OPERATOR, OperatorScope::PerCell > |
| Application of a cell-wise OPERATOR on a concrete vector CPU block. More... | |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::CPU_SIMD, OPERATOR, OperatorScope::PerCellWithParameters > |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::CPU_SISD, OPERATOR, OperatorScope::PerBlock > |
| Application of a block-wise OPERATOR on a concrete scalar CPU block. More... | |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::CPU_SISD, OPERATOR, OperatorScope::PerCell > |
| Application of a cell-wise OPERATOR on a concrete scalar CPU block. More... | |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::CPU_SISD, OPERATOR, OperatorScope::PerCellWithParameters > |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::GPU_CUDA, OPERATOR, OperatorScope::PerBlock > |
| Application of a block-wise OPERATOR on a concrete CUDA block. More... | |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::GPU_CUDA, OPERATOR, OperatorScope::PerCell > |
| Application of a cell-wise OPERATOR on a concrete CUDA block. More... | |
| class | ConcreteBlockO< T, DESCRIPTOR, Platform::GPU_CUDA, OPERATOR, OperatorScope::PerCellWithParameters > |
| Application of a parametrized cell-wise OPERATOR on a concrete CUDA block. More... | |
| class | ConcreteCommunicatable |
| class | ConcreteCommunicatable< ColumnVector< COLUMN, D > > |
| class | ConcreteCommunicatable< cpu::simd::CyclicColumn< T > > |
| class | ConcreteCommunicatable< FieldArrayD< T, DESCRIPTOR, PLATFORM, FIELD > > |
| class | ConcreteCommunicatable< gpu::cuda::Column< T > > |
| Communicatable implementation for a single gpu::cuda::Column. More... | |
| class | ConcreteCommunicatable< gpu::cuda::CyclicColumn< T > > |
| Communicatable implementation for a single gpu::cuda::CyclicColumn. More... | |
| class | ConcreteCommunicatable< MultiFieldArrayD< T, DESCRIPTOR, PLATFORM, FIELDS... > > |
| class | ConcreteCommunicatable< std::vector< COLUMN > > |
| struct | ConcreteHeterogeneousCopyTask |
| Private implementation of HeterogeneousCopyTask (PIMPL) More... | |
| struct | ConcreteParametersD |
| Concrete storage of ParametersD in olb::Data. More... | |
| class | ConcreteParametersD< T, DESCRIPTOR, Platform::GPU_CUDA, PARAMETERS > |
| Representation of (Dynamics,Operator)Parameters<DYNAMICS> for CUDA block lattice. More... | |
| struct | ConcretizableBlockData |
| Curried BlockData template for use in callUsingConcretePlatform. More... | |
| struct | ConcretizableBlockGeometry |
| Curried BlockGeometry template for use in callUsingConcretePlatform. More... | |
| struct | ConcretizableBlockLattice |
| Curried ConcreteBlockLattice template for use in callUsingConcretePlatform. More... | |
| struct | ConcretizableFieldArrayD |
| Curried FieldArrayD template for use in callUsingConcretePlatform. More... | |
| class | ConsoleWriter |
| class | ConstantRate |
| class | ConstCell |
| Highest-level interface to read-only Cell data. More... | |
| class | ConstSpan |
| class | ContactDetection |
| class | Container |
| Container is a std::vector inspired data wrapper that allows for simple content manipulation of its owned data. More... | |
| class | ContainerF |
| ContainerF is a NON-PARALLELIZED (no block/super differentiation) functor intended to extract data from Container objects as used e.g. More... | |
| class | ConvectionBoundaryProcessor3D |
| This class interpolates missing f_i from values near the boundary to get a more stable outflow condition for the density. More... | |
| class | ConvectionBoundaryProcessorGenerator3D |
| struct | CONVERSION_FACTOR_LENGTH |
| struct | CONVERSION_FACTOR_VELOCITY |
| class | Cosinus |
| Cosinus: Cosinus with period and amplitude. More... | |
| class | CosinusComposite |
| CosinusComposite: Composition of two Cosinus to shift the low point within a period - difference denotes the share of the period in which the low point is located. Calculated with case discrimination (xperiod < d or d <= xperiod) More... | |
| class | CSV |
| class | CubicDeltaBackCouplingModel |
| Back-coupling is performed on the cell containing the particle and its neighbours within a cube of one lattice spacing, as per in Maier et al. More... | |
| class | Cuboid2D |
| A regular single 2D cuboid is the basic component of a 2D cuboid structure which defines the grid. More... | |
| class | Cuboid3D |
| A regular single 3D cuboid is the basic component of a 3D cuboid structure which defines the grid. More... | |
| class | CuboidGeometry2D |
| A cuboid structure represents the grid of a considered domain. More... | |
| class | CuboidGeometry3D |
| A cuboid geometry represents a voxel mesh. More... | |
| struct | cum |
| class | CylinderToCartesian3D |
| This class converts cylindrical of point x (x[0] = radius, x[1] = phi, x[2] = z) to Cartesian coordinates (wrote into output field). More... | |
| class | Data |
| Storage of any FIELD_TYPE data on PLATFORM. More... | |
| class | DeenSmoothingFunctional |
| Smoothing functional as in Deen et al (2004), Chem. More... | |
| struct | DensityOutletCoupling2D |
| class | DewsburyDragModel |
| Class to compute the drag coefficient for gas bubbles in a liquid fluid phase as in Dewsbury et al. More... | |
| class | DragModel |
| Abstact base class for DragModelBase. More... | |
| class | DragModelBase |
| Abstact class for all the drag models. More... | |
| class | DynamicFieldGroupsD |
| Storage for dynamic field groups (Prototype for ParticleSystem) More... | |
| class | DynamicFieldGroupsD< T, meta::list< GROUPS... > > |
| struct | Dynamics |
| Interface for per-cell dynamics. More... | |
| struct | DynamicsMask |
| Describe mask of DYNAMICS in Data. More... | |
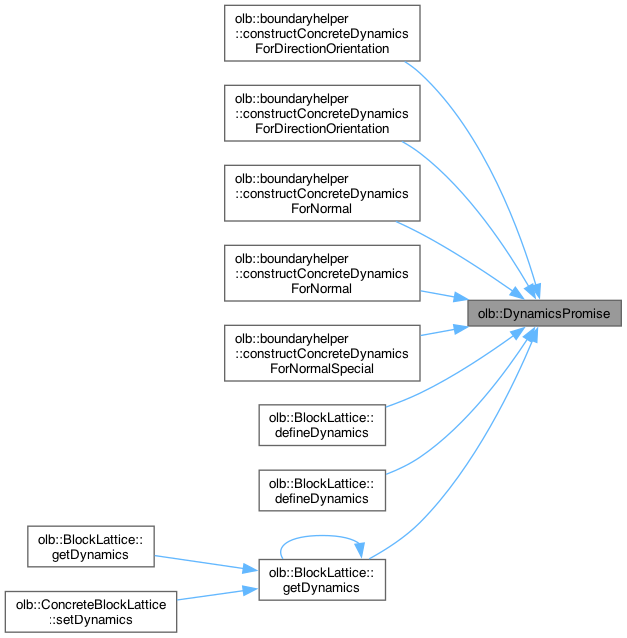
| class | DynamicsPromise |
| Factory for instances of a specific Dynamics type. More... | |
| class | EccentricLatticeVelocityField |
| Computes resulting lattice velocity of an object from translational and rotational velocity. More... | |
| class | EccentricVelocityField |
| Computes resulting velocity of an object from translational and rotational velocity. More... | |
| class | EllipticPoiseuille3D |
| This functor returns a quadratic Poiseuille profile for use with a pipe with elliptic cross-section. More... | |
| class | ElParticle3D |
| class | EntityF |
| class | EntropicDynamics |
| Implementation of the entropic collision step. More... | |
| class | EntropicEqDynamics |
| Implementation of the entropic collision step. More... | |
| struct | entropicLbHelpers |
| struct | entropicLbHelpers< T, descriptors::D2Q9<> > |
| struct | entropicLbHelpers< T, descriptors::D3Q19<> > |
| struct | equilibrium |
| class | Eul2LagrNormDistrPostProcessor3D |
| class | Eul2LagrNormDistrPostProcessorGenerator3D |
| class | Eul2LagrOperation3D |
| class | Eul2LagrOperator3D |
| class | Eul2LagrOperatorBase3D |
| class | Eul2LagrPostProcessor3D |
| class | Eul2LagrPostProcessorGenerator3D |
| class | ExpOn1stSpecieRate |
| Class implementing exponentially-decreasing reaction rate on the 1st reacting species, that is: nu = [A]/t0, with t0 being the time constant in lattice units. More... | |
| class | Expr |
| Basic value-substitute enabling extraction of expression trees for code generation. More... | |
| struct | ExprBase |
| class | ExtendedFdPlaneBoundaryPostProcessor3D |
| This class computes the finite difference approximation to LB boundary conditions on a plane wall in 3D with all the terms of the CE expansion. More... | |
| class | ExtendedFdPlaneBoundaryProcessorGenerator3D |
| class | ExtendedStraightFdBoundaryPostProcessor2D |
| This class computes the finite difference approximation to LB boundary conditions on a flat wall in 2D with all the terms of the CE expansion. More... | |
| class | ExtendedStraightFdBoundaryProcessorGenerator2D |
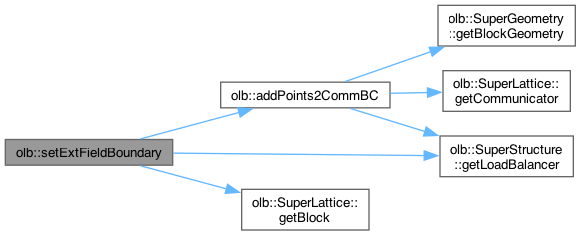
| class | ExtFieldBoundaryProcessor3D |
| This class copies missing values in the external field from the neighbour in normal direction. More... | |
| class | ExtFieldBoundaryProcessorGenerator3D |
| class | FdAdvectionDiffusionModel |
| class | FdBasePostProcessor2D |
| class | FdBasePostProcessor3D |
| class | FdBoundaryPostProcessor2D |
| class | FdBoundaryPostProcessor3D |
| class | FdPostProcessor2D |
| class | FdPostProcessor3D |
| class | FdUpdater |
| class | FdUpdaterBase |
| class | FieldArrayD |
| SoA storage for instances of a single FIELD. More... | |
| class | FieldTypeRegistry |
| Efficient indexing of dynamically allocated data fields. More... | |
| class | FieldTypeRegistry< T, DESCRIPTOR, Platform::GPU_CUDA > |
| Maintain on-device structure for dynamic field access. More... | |
| class | FileName |
| FileName class. More... | |
| class | FiniteDifferenceReactingSpecies2D |
| class | FiniteDifferenceReactingSpecies3D |
| class | Force3D |
| Prototype for all particle forces. More... | |
| struct | ForceCoupling2D |
| struct | ForceCoupling3D |
| class | ForcedEntropicDynamics |
| Implementation of the forced entropic collision step. More... | |
| class | ForcedEntropicEqDynamics |
| Implementation of the forced entropic collision step. More... | |
| class | ForcedPSMBGKdynamics |
| Implementation of the Partially Saturated Method (PSM), see Krüger, Timm, et al. More... | |
| struct | ForcedVANSBGKdynamics |
| VANS BGK collision step with external force. More... | |
| class | ForceFromExtField3D |
| class | ForwardCouplingModel |
| Abstact base class for all the forward-coupling models Its raison d'etre consists of not being templetized in Lattice. More... | |
| class | FreeEnergyChemicalPotentialCoupling2D |
| This class calculates the chemical potential and stores it in the external field of the respective lattice. More... | |
| class | FreeEnergyChemicalPotentialCoupling3D |
| This class calculates the chemical potential and stores it in the external field of the respective lattice. More... | |
| class | FreeEnergyChemicalPotentialGenerator2D |
| Generator class for the PostProcessors calculating the chemical potential. More... | |
| class | FreeEnergyChemicalPotentialGenerator3D |
| Generator class for the PostProcessors calculating the chemical potential. More... | |
| class | FreeEnergyChemPotBoundaryProcessor2DA |
| PostProcessors for the chemical potential boundary condition in the free energy model. More... | |
| class | FreeEnergyChemPotBoundaryProcessor2DB |
| class | FreeEnergyChemPotBoundaryProcessor3DA |
| PostProcessors for the chemical potential boundary condition in the free energy model. More... | |
| class | FreeEnergyChemPotBoundaryProcessor3DB |
| class | FreeEnergyConvectiveProcessor2D |
| PostProcessor for pressure / velocity outflow boundaries in the free energy model. More... | |
| class | FreeEnergyConvectiveProcessor3D |
| PostProcessor for the density / velocity outflow boundaries in the free energy model. More... | |
| class | FreeEnergyDensityOutletCoupling2D |
| PostProcessor for setting a constant density outlet. More... | |
| class | FreeEnergyDensityOutletCoupling3D |
| PostProcessor for setting a constant density outlet. More... | |
| class | FreeEnergyDensityOutletGenerator2D |
| Generator class for the PostProcessors assigning the density boundary condition at the outlet. More... | |
| class | FreeEnergyDensityOutletGenerator3D |
| Generator class for the PostProcessors assigning the density boundary condition at the outlet. More... | |
| class | FreeEnergyForceCoupling2D |
| PostProcessor calculating the interfacial force in the free energy model. More... | |
| class | FreeEnergyForceCoupling3D |
| PostProcessor calculating the interfacial force in the free energy model. More... | |
| class | FreeEnergyForceGenerator2D |
| Generator class for the PostProcessors calculating the interfacial force. More... | |
| class | FreeEnergyForceGenerator3D |
| Generator class for the PostProcessors calculating the interfacial force. More... | |
| class | FreeEnergyInletOutletCoupling2D |
| PostProcessor for assigning the velocity at inlet and outlets to lattice two and three. More... | |
| class | FreeEnergyInletOutletCoupling3D |
| PostProcessor for assigning the velocity at inlet and outlets to lattice two and three. More... | |
| class | FreeEnergyInletOutletGenerator2D |
| Generator class for the PostProcessors assigning the velocity at the outlet to lattice two and three. More... | |
| class | FreeEnergyInletOutletGenerator3D |
| Generator class for the PostProcessors assigning the velocity at the outlet to lattice two and three. More... | |
| class | FreeEnergyWallProcessor2D |
| PostProcessor for the wetting boundary condition in the free energy model. More... | |
| class | FreeEnergyWallProcessor3D |
| PostProcessor for the wetting boundary condition in the free energy model. More... | |
| class | FreeSurface2DSetup |
| Generator class for the PostProcessors tracking the interface. More... | |
| class | FreeSurface3DSetup |
| class | FreeSurfaceFinalizeConversionPostProcessor2D |
| Free Surface Processor 7 Finishes up left over cell conversions and prepares the state for the next simulation step. More... | |
| class | FreeSurfaceFinalizeConversionPostProcessor3D |
| Free Surface Processor 7 Finishes up left over cell conversions and prepares the state for the next simulation step. More... | |
| class | FreeSurfaceMassExcessPostProcessor2D |
| Free Surface Processor 6 Calculates mass excess from the cell type conversions and distributes them to neighbouring interface cells Keeps mass local if no neighbour exists until an interface reappears at this position. More... | |
| class | FreeSurfaceMassExcessPostProcessor3D |
| Free Surface Processor 6 Calculates mass excess from the cell type conversions and distributes them to neighbouring interface cells Keeps mass local if no neighbour exists until an interface reappears at this position. More... | |
| class | FreeSurfaceMassFlowPostProcessor2D |
| Free Surface Processor 1-3 Mass Flow Cleans up leftover flags from the previous simulation step. More... | |
| class | FreeSurfaceMassFlowPostProcessor3D |
| Free Surface Processor 1-3 Mass Flow Cleans up leftover flags from the previous simulation step. More... | |
| class | FreeSurfaceToFluidCellConversionPostProcessor2D |
| class | FreeSurfaceToFluidCellConversionPostProcessor3D |
| class | FreeSurfaceToGasCellConversionPostProcessor2D |
| Free Surface Processor 5 ToGas Converts cells to interface from fluid if a neighbouring cell was converted to a gas cell. More... | |
| class | FreeSurfaceToGasCellConversionPostProcessor3D |
| Free Surface Processor 5 ToGas Converts cells to interface from fluid if a neighbouring cell was converted to a gas cell. More... | |
| class | FreundlichIsotherm |
| class | Fringe2D |
| class | Fringe3D |
| struct | FullSlipBoundaryPostProcessor2D |
| struct | FullSlipBoundaryPostProcessor3D |
| class | FunctorPtr |
| Smart pointer for managing the various ways of passing functors around. More... | |
| class | GaussDistribution |
| Functor for a Gaussian (normal) distribution. More... | |
| class | GaussianHill2D |
| 8.6.1 Gauss Hill inital values More... | |
| class | GaussianHillTimeEvolution2D |
| 8.6.1 Gauss Hill time evolution More... | |
| class | GenericF |
| GenericF is a base class, that can represent continuous as well as discrete functions. More... | |
| struct | GenericVector |
| Generic vector of values supporting basic arithmetic. More... | |
| struct | GlobalPostProcessor2D |
| struct | GlobalPostProcessor3D |
| class | Gnuplot |
| struct | GranularCoupling |
| granular flow More... | |
| class | GroupedDataCommunicatable |
| struct | GroupedDataCommunicatableHelper |
| Declare GroupedDataCommunicatable containing each GROUP in DESCRIPTOR::fields_t. More... | |
| class | GroupedFieldF |
| GroupedFieldF is a NON-PARALLELIZED (no block/super differentiation) functor. More... | |
| class | HaiderLevenspielDragForce3D |
| class | HaiderLevenspielParticle3D |
| class | HaldaneRate |
| Class implementing Haldane kinetics, with 1st field being substrate concentration [S], 2nd being bacteria concentration [X]: nu = mu * [X]; mu = muMax * [S] / ([S] + Ks + [S]^2/KI) More... | |
| class | HarmonicOscillatingRotatingForceField3D |
| This functor gives a parabolic profile for a given point x as it computes the distance between x and the axis. More... | |
| class | HertzMindlinDeresiewicz3D |
| struct | HeterogeneousCopyTask |
| Wrapper for a local heterogeneous block communication request. More... | |
| class | HeterogeneousCopyTask< T, DESCRIPTOR, Platform::GPU_CUDA, TARGET > |
| Wrapper for a local heterogeneous block communication request. More... | |
| class | HeterogeneousCopyTask< T, DESCRIPTOR, SOURCE, Platform::GPU_CUDA > |
| Wrapper for a local heterogeneous block communication request. More... | |
| class | HeterogeneousCopyTaskDataForGpuSource |
| Private implementation of heterogeneous copy task between GPU_CUDA source and CPU_* target. More... | |
| class | HeterogeneousCopyTaskDataForGpuTarget |
| Private implementation of heterogeneous copy task between CPU_* source and GPU_CUDA target. More... | |
| class | HeterogeneousLoadBalancer |
| Load balancer for heterogeneous CPU-GPU systems. More... | |
| class | HeuristicLoadBalancer |
| Constructs a load balancer from a given cuboid geometry using a heurist. More... | |
| struct | Hyperplane2D |
| Definition of a analytical line embedded in 2D space. More... | |
| struct | Hyperplane3D |
| Definition of a analytical 2D plane embedded in 3D space. More... | |
| class | HyperplaneLattice2D |
| Parametrization of a hyperplane lattice (i.e. a line lattice). More... | |
| class | HyperplaneLattice3D |
| Parametrization of a hyperplane lattice. More... | |
| struct | ImplementationOf |
| Specializable declarator for concrete implementations of abstract storage types. More... | |
| struct | ImplementationOf< AbstractColumn< T >, Platform::CPU_SIMD > |
| Declare cpu::sisd::Column as the AbstractColumn implementation for CPU SISD targets. More... | |
| struct | ImplementationOf< AbstractColumn< T >, Platform::CPU_SISD > |
| Declare cpu::sisd::Column as the AbstractColumn implementation for CPU SISD targets. More... | |
| struct | ImplementationOf< AbstractColumn< T >, Platform::GPU_CUDA > |
| Declare gpu::cuda::Column as the AbstractColumn implementation for GPU CUDA targets. More... | |
| struct | ImplementationOf< AbstractCyclicColumn< T >, Platform::CPU_SIMD > |
| Declare cpu::sisd::CyclicColumn as the AbstractCyclicColumn implementation for CPU SISD targets. More... | |
| struct | ImplementationOf< AbstractCyclicColumn< T >, Platform::CPU_SISD > |
| Declare cpu::sisd::CyclicColumn as the AbstractCyclicColumn implementation for CPU SISD targets. More... | |
| struct | ImplementationOf< AbstractCyclicColumn< T >, Platform::GPU_CUDA > |
| Declare gpu::cuda::CyclicColumn as the AbstractCyclicColumn implementation for GPU CUDA targets. More... | |
| class | InamuroAnalyticalDynamics |
| Implementation of Inamuro boundary condition following the paper "A non-slip boundary condition for lattice Boltzmann simulations", Inamuro, Takaji; Yoshino, Masato; Ogino, Fumimaru, (1995). More... | |
| class | InamuroNewtonRaphsonDynamics |
| This class computes the inamuro BC with general dynamics. More... | |
| class | IndicatorBlockData2D |
| indicator from VTIreader More... | |
| class | IndicatorBlockData3D |
| class | IndicatorCircle2D |
| indicator function for a 2D circle More... | |
| class | IndicatorCircle3D |
| indicator function for a 3D circle More... | |
| class | IndicatorCone3D |
| indicator function for a 3d frustum More... | |
| class | IndicatorCuboid2D |
| indicator function for a 2D-cuboid, parallel to the planes x=0, y=0; theta rotates cuboid around its center, theta in radian measure More... | |
| class | IndicatorCuboid3D |
| indicator function for a 3d-cuboid, parallel to the planes x=0, y=0, z=0. More... | |
| class | IndicatorCuboidRotate3D |
| indicator function for a 3d-cuboid, turned by an angle theta around an axis of rotation More... | |
| class | IndicatorCylinder3D |
| indicator function for a 3d-cylinder More... | |
| class | IndicatorEllipsoid3D |
| indicator function for an ellipsoid More... | |
| class | IndicatorEquiTriangle2D |
| indicator function for a 2D equilateral triangle More... | |
| class | IndicatorF1D |
IndicatorF1D is an application from  | |
| class | IndicatorF2D |
IndicatorF2D is an application from  | |
| class | IndicatorF2DfromIndicatorF3D |
| indicator function for a 2D-cuboid, parallel to the planes x=0, y=0; theta rotates cuboid around its center, theta in radian measure More... | |
| class | IndicatorF3D |
IndicatorF3D is an application from  | |
| class | IndicatorIdentity2D |
| class | IndicatorIdentity3D |
| class | IndicatorInternal3D |
| indicator function for the internal part of an input indicator More... | |
| class | IndicatorLayer2D |
Indicator function creating an layer around an input indicator (for positive layerSize) or reducing the input indicator by a layer (for negative layerSize). More... | |
| class | IndicatorLayer3D |
| indicator function for a layer More... | |
| class | IndicatorSDF2D |
| class | IndicatorSDF3D |
| class | IndicatorSphere3D |
| indicator function for a 3D-sphere More... | |
| class | IndicatorSuperEllipsoid3D |
| indicator function for a super ellipsoid More... | |
| class | IndicatorTranslate3D |
| class | IndicatorTriangle2D |
| indicator function for a 2D triangle More... | |
| class | IndicCalc1D |
| IndicCalc1D //////////////////////////////// arithmetic helper class for Indicator 1d functors. More... | |
| class | IndicCalc2D |
| indicCalc2D //////////////////////////////// arithmetic helper class for Indicator 2D functors More... | |
| class | IndicComb3D |
| IndicComb3D //////////////////////////////// arithmetic helper class for Indicator 3d functors. More... | |
| class | IndicElongation |
| class | IndicInverse |
| class | IndicMinus1D |
| subtraction functor acts as without More... | |
| class | IndicMinus2D |
| Subtraction. More... | |
| class | IndicMinus3D |
| Subtraction. More... | |
| class | IndicMultiplication1D |
| multiplication functor acts as intersection More... | |
| class | IndicMultiplication2D |
| Intersection. More... | |
| class | IndicMultiplication3D |
| Intersection. More... | |
| class | IndicPlus1D |
| addition functor acts as union More... | |
| class | IndicPlus2D |
| Union. More... | |
| class | IndicPlus3D |
| Union. More... | |
| class | IndicScale |
| struct | InletOutletCoupling2D |
| struct | InletOutletCoupling3D |
| class | InterpMagForceForMagP3D |
| class | Isotherm |
| Base class for isotherms. More... | |
| class | Krause |
| class | LaddForwardCouplingModel |
| Class for a forward-coupling model following the Ladd's mechanism. More... | |
| class | LaddMomentumExchange |
| Using Ladd mechanism. More... | |
| class | LangmuirIsotherm |
| class | LatticeBoltzmannReactingSpecies2D |
| class | LatticeBoltzmannReactingSpecies3D |
| class | LatticeCouplingGenerator2D |
| class | LatticeCouplingGenerator3D |
| struct | LatticePosAndWeight |
| Data structure for smoothing functionals. More... | |
| class | LatticeStatistics |
| struct | lbHelpers |
| struct | lbm |
| Collection of common computations for LBM. More... | |
| class | LbSolver |
| LbSolver is a generic solver for Lattice-Boltzmann problems. More... | |
| class | LegacyBlockCollisionO |
| Concrete collision operator for legacy dynamics. More... | |
| class | LegacyBlockPostProcessorO |
| Block operator for supporting legacy post processor in the new operator-centric framework. More... | |
| class | LegacyConcreteDynamics |
| Concrete CPU dynamics for legacy dynamics. More... | |
| struct | LESADECoupling |
| LES-ADE coupling with Schmidt number stabilization. More... | |
| struct | LESReactionCoupling |
| LES-ADE coupling for multiple reactions. More... | |
| class | LightSourceCylindrical3D |
| light source as a cylinder along z-axis More... | |
| class | LinearAveragingSmoothingFunctional |
| Abstact class for all the linear-averaging smoothing functionals. More... | |
| class | LinearContactForce3D |
| class | LinearDampingForceForMagDipoleMoment3D |
| class | LinearIsotherm |
| class | LoadBalancer |
| Base class for all LoadBalancer. More... | |
| class | LocalBackCouplingModel |
| Back-coupling is performed only on the cell containing the particle. More... | |
| class | LocalBaseForwardCouplingModel |
| Abstact class for all the local forward-coupling models, viz., momentum coupling from fluid to particle. More... | |
| struct | LocalPostProcessor2D |
| struct | LocalPostProcessor3D |
| class | LogNormalDistribution |
| Functor for a logarithmic normal distribution. More... | |
| struct | LongitudinalMixingReactionCoupling |
| Reaction Coupling for the In-Bulk appraoch of lognitudinalMixing3d example. More... | |
| struct | LpNormImpl |
| Lp norm functor implementation details specific to the P parameter. More... | |
| struct | LpNormImpl< T, W, 0 > |
| Linf norm functor implementation details. More... | |
| struct | LpNormImpl< T, W, 1 > |
| L1 norm functor implementation details. More... | |
| struct | LpNormImpl< T, W, 2 > |
| L2 norm functor implementation details. More... | |
| class | MagneticFieldFromCylinder3D |
| class | MagneticForceForMagP3D |
| class | MagneticForceFromCylinder3D |
| Magnetic field that creates magnetization in wire has to be orthogonal to the wire. More... | |
| class | MagneticParticle3D |
| class | MaterialBoundary3D |
| class | MaterialSTLBoundary3D |
| class | Matrix |
| Matrix with a defined number of ROWS and columns (COLS) More... | |
| struct | MCMPForcedPostProcessor |
| Multi-Component-Multi-Phase Shan-Chen force with thermodynamic equation of state based on. More... | |
| class | MixedScaleBoussinesqCouplingGenerator2D |
| class | MixedScaleBoussinesqCouplingGenerator3D |
| class | MixedScaleBoussinesqCouplingPostProcessor2D |
| class | MixedScaleBoussinesqCouplingPostProcessor3D |
| class | MonodRate |
| Class implementing Monod kinetics, with 1st field being substrate concentration [S], 2nd being bacteria concentration [X]: nu = mu * [X]; mu = muMax * [S] / ([S] + Ks) More... | |
| class | MorsiDragModel |
| Class to compute the standard drag coefficient as in Morsi and Alexander (1972). More... | |
| class | MPI_Group_Wrapper |
| class | MpiRecvRequest |
| Non-blocking MPI receive request. More... | |
| class | MpiRequest |
| Basic wrapper around a single MPI_Request. More... | |
| class | MpiSendRequest |
| Non-blocking MPI send request. More... | |
| struct | mrt |
| class | MultiComponentPengRobinson |
| class | MultiConcreteCommunicatable |
| class | MultiFieldArrayD |
| Storage for a fixed set of static FIELDS and arbitrary custom fields. More... | |
| struct | MultiFieldArrayForDescriptorHelper |
| Declare MultiFieldArrayD containing each field in DESCRIPTOR::fields_t. More... | |
| class | MultiPhaseUnitConverter |
| Conversion between physical and lattice units, as well as discretization for multiple component lattices. More... | |
| class | Musker |
| Musker profile. More... | |
| class | NaiveForwardCouplingModel |
| Class for a naive forward-coupling model. More... | |
| class | NaiveMomentumExchange |
| Naive way. More... | |
| class | NaiveNonLocalForwardCouplingModel |
| Class for a naive, non-local forward-coupling model as in Sungkorn et al. More... | |
| class | NanoflannContact |
| class | NanoflannParticleAdaptor |
| struct | NavierStokesAdvectionDiffusionCoupling |
| Coupling between a Navier-Stokes and an Advection-Diffusion lattice. More... | |
| struct | NavierStokesAdvectionDiffusionVelocityCoupling |
| Velocity coupling between Navier-Stokes and an Advection-Diffusion lattice. More... | |
| class | NewtonianParticleReynoldsNumber |
| Class class for Newtonian particle Reynolds number computation within drag model. More... | |
| class | NonLocalBaseBackCouplingModel |
| Class for a generic non-local back-coupling model (but this is NOT VIRTUAL!), viz., momentum coupling from particle to fluid, for model more complicated that CubicDeltaBackCouplingModel. More... | |
| class | NonLocalBaseForwardCouplingModel |
| Abstact class for all the non-local forward-coupling models, viz., momentum coupling from fluid to particle. More... | |
| class | Normal |
| class | Octree |
| class | olb_fstream |
| class | olb_ifstream |
| class | olb_ofstream |
| class | OMBuf |
| userdefined stream buffer for OstreamManager More... | |
| struct | ompManager |
| struct | OperatorParameters |
| Describe paramaters of OPERATOR in Data. More... | |
| class | OrthogonalHeterogeneousLoadBalancer |
| Load balancer for heterogeneous CPU-GPU systems. More... | |
| class | OstreamManager |
| class for marking output with some text More... | |
| class | OuterVelocityCornerProcessor2D |
| This class computes the skordos BC in 2D on a convex corner but with a limited number of terms added to the equilibrium distributions (i.e. More... | |
| struct | OuterVelocityCornerProcessor3D |
| class | OuterVelocityEdgeProcessor3D |
| This class computes the skordos BC on a convex edge wall in 3D but with a limited number of terms added to the equilibrium distributions (i.e. More... | |
| class | ParameterD |
| Storage of a single FIELD-valued parameter. More... | |
| struct | ParametersD |
| Set of FIELD-valued parameters. More... | |
| class | ParBuf |
| class | PartialSlipBoundaryProcessor2D |
| This class computes a partial slip BC in 2D. More... | |
| class | PartialSlipBoundaryProcessor3D |
| This class computes a partial slip BC in 3D. More... | |
| class | PartialSlipBoundaryProcessorGenerator2D |
| class | PartialSlipBoundaryProcessorGenerator3D |
| class | Particle3D |
| struct | ParticleAdvectionDiffusionBGKdynamics |
| This approach contains a slight error in the diffusion term. More... | |
| class | ParticleCircumRadiusF |
| ParticleCircumRadiusF NON-PARALLELIZED (no block/super differentiation) functor, which returns the circumRadius of a smoothIndicator. More... | |
| class | ParticleDistribution |
| Particle distribution for time and size discretization. More... | |
| class | ParticleIndicatorF3D |
| class | ParticleOperation3D |
| class | ParticleReynoldsNumber |
| Abstract class for particle Reynolds number computation within drag model. More... | |
| class | ParticleReynoldsNumberBase |
| Abstract class for particle Reynolds number computation within drag model. More... | |
| class | ParticleSystem3D |
| class | PassiveAdvectionOperation3D |
| class | PassiveSoluteCouplingPostProcessor3D |
| Coupler for solute that is only coupled to the fluid velocity. More... | |
| class | PassiveSoluteCouplingPostProcessorGenerator3D |
| class | PengRobinson |
| class | PeriodicBoundary3D |
| struct | PhaseFieldAdvectionDiffusionBGKdynamics |
| class | PhaseFieldCouplingGenerator2D |
| class | PhaseFieldCouplingGenerator3D |
| class | PhaseFieldCouplingPostProcessor2D |
| class | PhaseFieldCouplingPostProcessor3D |
| class | PlaneFdBoundaryProcessor3D |
| This class computes the skordos BC on a plane wall in 3D but with a limited number of terms added to the equilibrium distributions (i.e. More... | |
| class | PLattice |
| class | PLSsolution3D |
| see Mink et al. 2016 in Sec.3.1. More... | |
| class | Poiseuille2D |
| class | PoiseuilleStrainRate2D |
| class | PolarToCartesian2D |
| This class converts polar coordinates of point x (x[0] = radius, x[1] = phi) to Cartesian coordinates (wrote into output field). More... | |
| class | PolynomialStartScale |
| PolynomialStartScale: 1D -> 1D a start curve based on a polynomial fifth order for a continuous transition at 0 and 1: maxValue*(6*y^5-15*y^4+10*y^3) More... | |
| class | PopulationCellD |
| Minimal cell storing only population data. More... | |
| class | PorousAdvectionDiffusionBGKdynamics |
| This approach contains a slight error in the diffusion term. More... | |
| class | PorousNavierStokesAdvectionDiffusionCouplingGenerator3D |
| class | PorousNavierStokesAdvectionDiffusionCouplingPostProcessor3D |
| class | PostProcessor2D |
| Interface of 2D post-processing steps. More... | |
| class | PostProcessor3D |
| class | PostProcessorGenerator2D |
| class | PostProcessorGenerator3D |
| class | PostProcessorPromise |
| Factory for instances of a specific POST_PROCESSOR type. More... | |
| class | PowerLaw2D |
| class | PowerLawDewsburyDragModel |
| Class to compute the drag coefficient for gas bubbles in a liquid fluid phase as in Dewsbury et al. More... | |
| class | PowerLawMorsiDragModel |
| Class to compute the standard drag coefficient as in Morsi and Alexander (1972), in a power-law fluid. More... | |
| class | PowerLawParticleReynoldsNumber |
| Class class for power-law particle Reynolds number computation within drag model. More... | |
| class | PowerLawProfile |
| PowerLaw profile. More... | |
| class | PowerLawSchillerNaumannDragModel |
| Class to compute the standard drag coefficient as in Schiller and Naumann (1935), in a power-law fluid. More... | |
| class | PowerLawSunDragModel |
| Class to compute the drag coefficient for gas bubbles in a liquid fluid phase as in Sun, Guo, Wang et al. More... | |
| class | PsiEqualsRho |
| class | RadiativeUnitConverter |
| Conversion between physical and lattice units, as well as discretization. More... | |
| struct | RandomLoadBalancer |
| Basic Random Load Balancer. More... | |
| class | RandomTruncatedWalkOperation3D |
| class | RandomWalkOperation3D |
| class | Rate |
| class | ReactingSpecies2D |
| class | ReactingSpecies3D |
| class | ReactionGenerator2D |
| class | ReactionGenerator3D |
| class | ReactionPostProcessor2D |
| class | ReactionPostProcessor3D |
| class | RectanglePoiseuille3D |
| This functor returns a Poiseuille profile for use with a pipe with square shaped cross-section. More... | |
| class | RectangleTrigonometricPoiseuille3D |
| class | ReflectBoundary3D |
| class | RegularCachedIndicatorF3D |
| struct | RhoStatistics |
| Multiphysics class for coupling between different lattices. More... | |
| struct | robinBoundaryExtendedPostProcessor3DCorners |
| struct | robinBoundaryExtendedPostProcessor3DEdges |
| struct | robinBoundaryLatticePostProcessor3D |
| First scheme adapted from Xuhui Meng and Zhaoli Guo. More... | |
| struct | robinBoundaryLatticePostProcessor3Dother |
| class | RotatingForceField3D |
| This functor gives a parabolic profile for a given point x as it computes the distance between x and the axis. More... | |
| class | RotatingLinear3D |
| This functor gives a linar profile for a given point x as it computes the distance between x and the axis. More... | |
| class | RotatingLinearAnnulus3D |
| This functor gives a linar profile in an annulus for a given point x between the inner and outer radius as it computes the distance between x and the inner and outer radius. More... | |
| class | RotatingParticle3D |
| class | RotatingQuadratic1D |
| This functor gives a parabolic profile for a given point x as it computes the distance between x and the axis. More... | |
| class | RotationRoundAxis3D |
| This class saves coordinates of the resulting point after rotation in the output field. More... | |
| class | RtlbmDiffuseBoundaryDynamics |
| Defines incoming (axis parallel) directions on flat walls. More... | |
| class | RtlbmDiffuseConstBoundaryDynamics |
| Defines incoming directions on flat walls. More... | |
| class | RtlbmDiffuseConstCornerBoundaryDynamics |
| Defines incoming directions on corner boundaries. More... | |
| class | RtlbmDiffuseConstEdgeBoundaryDynamics |
| Defines incoming directions on edge boundaries. More... | |
| class | RtlbmDiffuseCornerBoundaryDynamics |
| class | RtlbmDiffuseEdgeBoundaryDynamics |
| class | RtlbmDirectedBoundaryDynamics |
| class | RtlbmDirectedCornerBoundaryDynamics |
| class | RtlbmDirectedEdgeBoundaryDynamics |
| class | RTLBMdynamicsMcHardy |
| Solves RTE according Christopher McHardy et al 2016. More... | |
| class | RTLBMdynamicsMcHardyRK |
| struct | SCALAR2 |
| struct | ScalarVector |
| Vector of scalars. More... | |
| class | SchillerNaumannDragForce3D |
| class | SchillerNaumannDragModel |
| Class to compute the standard drag coefficient as in Schiller and Naumann (1935). More... | |
| struct | SEEDS |
| struct | SEEDS_COUNT |
| struct | SEEDS_VORTICITY |
| class | Serializable |
Base class for serializable objects of constant size. For dynamic size use BufferSerializable. More... | |
| class | Serializer |
Class for writing, reading, sending and receiving Serializable objects. More... | |
| class | ShanChen93 |
| class | ShanChen94 |
| class | ShanChenDynOmegaForcedGenerator2D |
| class | ShanChenDynOmegaForcedGenerator3D |
| class | ShanChenDynOmegaForcedPostProcessor2D |
| Multiphysics class for coupling between different lattices. More... | |
| class | ShanChenDynOmegaForcedPostProcessor3D |
| Multiphysics class for coupling between different lattices. More... | |
| struct | ShanChenForcedPostProcessor |
| class | ShanChenForcedSingleComponentGenerator2D |
| class | ShanChenForcedSingleComponentGenerator3D |
| struct | ShanChenForcedSingleComponentPostProcessor |
| class | ShanChenForcedSingleComponentPostProcessor2D |
| Multiphysics class for coupling between different lattices. More... | |
| class | ShanChenForcedSingleComponentPostProcessor3D |
| Multiphysics class for coupling between different lattices. More... | |
| struct | SIGMA |
| struct | SimdBase |
| class | SimpleReflectBoundary3D |
| class | SimulateParticles |
| class | SimulateParticles< T, HaiderLevenspielParticle3D > |
| class | SimulateParticles< T, MagneticParticle3D > |
| class | SimulateParticles< T, RotatingParticle3D > |
| class | Sinus |
| Sinus: Sinus with period and amplitude. More... | |
| class | SinusStartScale |
| SinusStartScale: 1D -> 1D a start curve based on sinus for a continuous transition at 0 and 1. More... | |
| struct | SlipBoundaryPostProcessor3D |
| class | SlipBoundaryProcessor2D |
| This class computes a slip BC in 2D. More... | |
| class | SlipBoundaryProcessor3D |
| This class computes a slip BC in 3D. More... | |
| class | SlipBoundaryProcessorGenerator2D |
| class | SlipBoundaryProcessorGenerator3D |
| struct | SmagorinskyBoussinesqCoupling |
| AD coupling with Boussinesq bouancy for Smagorinsky-LES. More... | |
| class | SmagorinskyBoussinesqCouplingGenerator2D |
| class | SmagorinskyBoussinesqCouplingGenerator3D |
| class | SmagorinskyBoussinesqCouplingPostProcessor2D |
| class | SmagorinskyBoussinesqCouplingPostProcessor3D |
| class | SmoothBlockIndicator3D |
| class | SmoothIndicatorCircle2D |
| implements a smooth circle in 2D with an _epsilon sector More... | |
| class | SmoothIndicatorCone3D |
| implements a smooth particle cone in 3D with an _epsilon sector More... | |
| class | SmoothIndicatorCuboid2D |
| implements a smooth cuboid in 2D with an _epsilon sector. More... | |
| class | SmoothIndicatorCuboid3D |
| implements a smooth particle cuboid in 3D with an _epsilon sector. More... | |
| class | SmoothIndicatorCustom2D |
| class | SmoothIndicatorCustom3D |
| class | SmoothIndicatorCylinder3D |
| implements a smooth particle cylinder in 3D with an _epsilon sector. More... | |
| class | SmoothIndicatorEllipsoid3D |
| implements a smooth particle ellipsoid in 3D with an _epsilon sector. More... | |
| class | SmoothIndicatorF2D |
| class | SmoothIndicatorF2D< T, S, false > |
SmoothIndicatorF2D is an application from ![$ \Omega \subset R^3 \to [0,1] $](../../form_9_dark.png) | |
| class | SmoothIndicatorF2D< T, S, true > |
| SmoothIndicatorF2D is an application from | |
| class | SmoothIndicatorF3D |
| class | SmoothIndicatorF3D< T, S, false > |
| SmoothIndicatorF3D is an application from | |
| class | SmoothIndicatorF3D< T, S, true > |
| SmoothIndicatorF3D is an application from | |
| class | SmoothIndicatorFactoredCircle2D |
| factorizable output smooth circle in 2D with a tangiant or ramp epsilon sector More... | |
| class | SmoothIndicatorFactoredCircle3D |
| factorizable output smooth sphere in 3D with a tangiant or ramp epsilon sector More... | |
| class | SmoothIndicatorFactoredCuboid2D |
| factorizable output smooth cuboid in 2D with a tangiant or ramp epsilon sector More... | |
| class | SmoothIndicatorHTCircle2D |
| implements a smooth circle in 2D with an tangiant _epsilon sector More... | |
| class | SmoothIndicatorIdentity2D |
| class | SmoothIndicatorIdentity3D |
| class | SmoothIndicatorSphere3D |
| implements a smooth sphere in 3D with an _epsilon sector More... | |
| class | SmoothIndicatorSuperEllipsoid3D |
| implements a smooth particle super-ellipsoid in 3D. The epsilon sector is currently missing. More... | |
| class | SmoothIndicatorTriangle2D |
| implements a smooth triangle in 2D with an _epsilon sector More... | |
| class | SmoothIndicCalc2D |
| IndicSmoothCalc2D //////////////////////////////// arithmetic helper class for Indicator 2d functors. More... | |
| class | SmoothIndicCalc3D |
| IndicSmoothCalc3D //////////////////////////////// arithmetic helper class for Indicator 3d functors. More... | |
| class | SmoothIndicPlus2D |
| addition functor acts as union More... | |
| class | SmoothIndicPlus3D |
| addition functor acts as union More... | |
| class | SmoothingFunctional |
| Abstact class for all the smoothing functionals. More... | |
| struct | SolidBoundary |
| struct | SourcedAdvectionDiffusionBGKdynamics |
| struct | SourcedLimitedAdvectionDiffusionBGKdynamics |
| class | SpecialAnalyticalFfromBlockF3D |
| Converts block functors to analytical functors (special) More... | |
| class | SphericalToCartesian3D |
| This class converts spherical coordinates of point x (x[0] = radius, x[1] = phi, x[2] = theta) to Cartesian coordinates wrote into output field. More... | |
| class | Spotlight |
| struct | StatisticsPostProcessor |
| class | StepSmoothingFunctional |
| Stepwise smoothing functional. More... | |
| class | STLmesh |
| class | STLreader |
| struct | STLtriangle |
| class | StochasticSGSdynamics |
| Implementation of the MRT collision step with stochastic relaxation based on " A stochastic subgrid model with application to turbulent flow and scalar mixing"; Phys. More... | |
| class | StokesDragForce3D |
| class | StokesDragForceForHomVelField3D |
| class | StokesSimplifiedDragModel |
| Class to compute a drag coefficient Cd=1.83 for low-Re Stokes drag. More... | |
| class | StraightConvectionBoundaryProcessor2D |
| This class computes a convection BC on a flat wall in 2D. More... | |
| class | StraightConvectionBoundaryProcessor3D |
| class | StraightConvectionBoundaryProcessorGenerator2D |
| class | StraightFdBoundaryProcessor2D |
| This class computes the skordos BC on a flat wall in 2D but with a limited number of terms added to the equilibrium distributions (i.e. More... | |
| struct | StripeOffDensityOffsetO |
| Operator for striping off density offset. More... | |
| class | SunDragModel |
| Class to compute the drag coefficient for gas bubbles in a liquid fluid phase as in Sun, Guo, Wang et al. More... | |
| class | SuperAbsoluteErrorLpNorm2D |
| Absolute error norm functor. More... | |
| class | SuperAbsoluteErrorLpNorm3D |
| Absolute error norm functor. More... | |
| class | SuperAverage2D |
| SuperAverage2D returns the average in each component of f on a indicated subset. More... | |
| class | SuperAverage3D |
| SuperAverage3D returns the average in each component of f on a indicated subset. More... | |
| class | SuperCalcF2D |
| Arithmetic operations for SuperF2D functors. More... | |
| class | SuperCalcF3D |
| Arithmetic operations for SuperF3D functors. More... | |
| class | SuperCommunicationTagCoordinator |
| Communication-free negotation of unique tags for inter-cuboid communication. More... | |
| class | SuperCommunicator |
| Generic communicator for overlaps between blocks of SUPER. More... | |
| class | SuperConst2D |
| Functor returning a constant vector for all inputs. More... | |
| class | SuperConst3D |
| Functor returning a constant vector for all inputs. More... | |
| class | SuperContainerF |
| class | SuperData |
| class | SuperData3D |
| class | SuperDataF2D |
Functor from SuperData2D More... | |
| class | SuperDataF3D |
Functor from SuperData3D More... | |
| class | SuperDiscretizationF2D |
| Super functor for discretizing values by an interval (bottomBoundary,topBoundary), as well as restricting the value by setting n equal-distributed points and rounding the value to the nearest point If n = 1, there won't be restricting, and for n>=1 there will be n-1 restricting points. More... | |
| class | SuperDiscretizationF3D |
| Super functor for discretizing values by an interval (bottomBoundary,topBoundary), as well as restricting the value by setting n equal-distributed points and rounding the value to the nearest point If n = 1, there won't be restricting, and for n>=1 there will be n-1 restricting points. More... | |
| class | SuperEntityF |
| class | SuperEuklidNorm2D |
| functor that returns pointwise the l2-norm, e.g. of a velocity More... | |
| class | SuperEuklidNorm3D |
| functor that returns pointwise the l2-norm, e.g. of a velocity More... | |
| class | SuperExtractComponentF3D |
| functor to extract one component More... | |
| class | SuperExtractComponentIndicatorF3D |
| functor to extract one component inside an indicator More... | |
| class | SuperExtractIndicatorF3D |
| functor to extract data inside an indicator More... | |
| class | SuperF2D |
| represents all functors that operate on a SuperStructure<T,2> in general More... | |
| class | SuperF3D |
| represents all functors that operate on a SuperStructure<T,3> in general More... | |
| class | SuperField2D |
| class | SuperField3D |
| class | SuperFieldArrayD |
| class | SuperFiniteDifference3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperGeometry |
| Representation of a statistic for a parallel 2D geometry. More... | |
| class | SuperGeometryFaces2D |
| Accumulates the discrete surface of indicated cells facing unit directions and returns the individual as well as the total surface in phys units. More... | |
| class | SuperGeometryFaces3D |
| Accumulates the discrete surface of indicated cells facing unit directions and returns the individual as well as the total surface in phys units. More... | |
| class | SuperGeometryFacesIndicator2D |
| functor counts to get the discrete surface for a material no. and SmoothIndicator in direction (1,0,0), (0,1,0), (0,0,1), (-1,0,0), (0,-1,0), (0,0,-1) and total surface, then it converts it into phys units More... | |
| class | SuperGeometryFacesIndicator3D |
| functor counts to get the discrete surface for a material no. and SmoothIndicator in direction (1,0,0), (0,1,0), (0,0,1), (-1,0,0), (0,-1,0), (0,0,-1) and total surface, then it converts it into phys units More... | |
| class | SuperGeometryStatistics2D |
| class | SuperGeometryStatistics3D |
| class | SuperIdentity2D |
| identity functor for memory management More... | |
| class | SuperIdentity3D |
| identity functor for memory management More... | |
| class | SuperIdentityOnSuperIndicatorF3D |
| identity functor for memory management More... | |
| class | SuperIndicatorBoundaryNeighbor2D |
| Indicator identifying neighbors of boundary cells. More... | |
| class | SuperIndicatorBoundaryNeighbor3D |
| Indicator identifying neighbors of boundary cells. More... | |
| class | SuperIndicatorF2D |
| class | SuperIndicatorF3D |
| Base indicator functor (discrete) More... | |
| class | SuperIndicatorFfromIndicatorF2D |
| SuperIndicatorF2D from IndicatorF2D. More... | |
| class | SuperIndicatorFfromIndicatorF3D |
| SuperIndicatorF3D from IndicatorF3D. More... | |
| class | SuperIndicatorFfromSmoothIndicatorF2D |
| SuperIndicatorF2D from SmoothIndicatorF2D. More... | |
| class | SuperIndicatorFfromSmoothIndicatorF3D |
| SuperIndicatorF3D from SmoothIndicatorF3D. More... | |
| class | SuperIndicatorIdentity2D |
| Indicator identity functor. More... | |
| class | SuperIndicatorIdentity3D |
| Indicator identity functor. More... | |
| class | SuperIndicatorLayer3D |
| Indicator extended by a layer. More... | |
| class | SuperIndicatorMaterial2D |
| Indicator functor from material numbers. More... | |
| class | SuperIndicatorMaterial3D |
| Indicator functor from material numbers. More... | |
| class | SuperIndicatorMultiplication3D |
| Indicator intersection functor. More... | |
| class | SuperIntegral2D |
| SuperIntegral2D integrates f on a indicated subset. More... | |
| class | SuperIntegral3D |
| SuperIntegral3D integrates f on a indicated subset. More... | |
| class | SuperIsotropicHomogeneousTKE3D |
| class | SuperLaplacian3D |
| functor to get pointwise finite difference Laplacian operator More... | |
| class | SuperLattice |
| Super class maintaining block lattices for a cuboid decomposition. More... | |
| class | SuperLatticeCellList |
| class | SuperLatticeCoords2D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeCoords3D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeCoupling |
| Coupling operator COUPLER on named COUPLEES. More... | |
| class | SuperLatticeCuboid2D |
| functor to get pointwise the cuboid no. + 1 on local lattice More... | |
| class | SuperLatticeCuboid3D |
| functor to get pointwise the cuboid no. + 1 on local lattice More... | |
| class | SuperLatticeDensity2D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeDensity3D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeDiscreteNormal2D |
| functor to get pointwise the discrete normal vector of local lattice boundary cells More... | |
| class | SuperLatticeDiscreteNormal3D |
| functor to get pointwise the discrete normal vector of local lattice boundary cells More... | |
| class | SuperLatticeDiscreteNormalType2D |
| functor to get pointwise the type of a discrete normal vector More... | |
| class | SuperLatticeDiscreteNormalType3D |
| functor to get pointwise the type of a discrete normal vector More... | |
| class | SuperLatticeDissipation3D |
| functor to get pointwise dissipation density on local lattices More... | |
| class | SuperLatticeDissipationFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticeEul2LagrDensity3D |
| functor to get pointwise external field for Lagrangian particle density, converted to Eulerian More... | |
| class | SuperLatticeExternal2D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeExternal3D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeExternalScalarField2D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeExternalScalarField3D |
| functor to get pointwise density rho on local lattices More... | |
| class | SuperLatticeExternalVelocity3D |
| functor to get pointwise velocity on local lattice More... | |
| class | SuperLatticeExternalVelocityGradientFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticeF2D |
| represents all functors that operate on a SuperLattice in general, e.g. getVelocity(), getForce(), getPressure() More... | |
| class | SuperLatticeF3D |
| represents all functors that operate on a SuperLattice in general, e.g. getVelocity(), getForce(), getPressure() More... | |
| class | SuperLatticeFfromAnalyticalF2D |
| Functor used to convert analytical functions to lattice functions. More... | |
| class | SuperLatticeFfromAnalyticalF3D |
| Functor used to convert analytical functions to lattice functions. More... | |
| class | SuperLatticeField2D |
| class | SuperLatticeField3D |
| functor to get pointwise, lattice-dependent external field More... | |
| class | SuperLatticeFlux3D |
| functor to get pointwise flux on local lattice More... | |
| class | SuperLatticeFpop3D |
| functor to get pointwise f population on local lattices More... | |
| class | SuperLatticeGeometry2D |
| functor to get pointwise the material no. presenting the geometry on local lattice More... | |
| class | SuperLatticeGeometry3D |
| functor to get pointwise the material no. presenting the geometry on local lattice More... | |
| class | SuperLatticeHighOrderKnudsen3D |
| class | SuperLatticeIdentity3D |
| identity functor for memory management More... | |
| class | SuperLatticeIndicatorSmoothIndicatorIntersection2D |
| functor that returns 1 if SmoothIndicatorF A intersects IndicatorF B; otherwise, 0 More... | |
| class | SuperLatticeIndicatorSmoothIndicatorIntersection3D |
| functor that returns 1 if SmoothIndicatorF A intersects IndicatorF B; otherwise, 0 More... | |
| class | SuperLatticeInterpDensity3Degree3D |
| class | SuperLatticeInterpPhysVelocity2D |
| class | SuperLatticeInterpPhysVelocity3D |
| class | SuperLatticeInterpPhysVelocity3Degree3D |
| class | SuperLatticeInterpVelocity3D |
| class | SuperLatticeKineticEnergy3D |
| functor to get pointwise velocity on local lattice More... | |
| class | SuperLatticeKnudsen2D |
| SuperLatticeKnudsen2D measures cell-local ratio between non-equilibrium and equilibrium distribution. More... | |
| class | SuperLatticeKnudsen3D |
| SuperLatticeKnudsen3D measures cell-local ratio between non-equilibrium and equilibrium distribution. More... | |
| class | SuperLatticeMomentumExchangeForceLocal |
| The following are functors that work in the traditional (output[], input[]) sense, They can therefore be used e.g. More... | |
| class | SuperLatticeMomentumExchangeForceLocalParallel |
| functor to get pointwise momentum exchange on local lattice (parallel particle version) More... | |
| class | SuperLatticeParticleForce |
| Functor that returns forces acting on a particle surface, returns data in output for every particle in a row(described are return values for the first particle). More... | |
| class | SuperLatticePhysBoundaryDistance3D |
| functor that returns the minimum distance (in m) to a set of indicators given by an xmlReader More... | |
| class | SuperLatticePhysBoundaryForce2D |
| functor to get pointwise phys force acting on a boundary with a given material on local lattice More... | |
| class | SuperLatticePhysBoundaryForce3D |
| functor to get pointwise phys force acting on a boundary with a given material on local lattice More... | |
| class | SuperLatticePhysCorrBoundaryForce2D |
| functor to get pointwise phys force acting on a boundary with a given material on local lattice see: Caiazzo, Junk: Boundary Forces in lattice Boltzmann: Analysis of MEA More... | |
| class | SuperLatticePhysCorrBoundaryForce3D |
| functor to get pointwise phys force acting on a boundary with a given material on local lattice see: Caiazzo, Junk: Boundary Forces in lattice Boltzmann: Analysis of MEA More... | |
| class | SuperLatticePhysCorrDrag2D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | SuperLatticePhysCorrDrag3D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | SuperLatticePhysCroppedPermeability3D |
| functor to get pointwise mesh-independent permeability values in (0,inf) in combination with (Extended)PorousBGKdynamics note: result is cropped to 1 More... | |
| class | SuperLatticePhysDarcyForce2D |
| computes pointwise -nu/K*u on the lattice, can be used with SuperSum2D as objective More... | |
| class | SuperLatticePhysDarcyForce3D |
| computes pointwise -nu/K*u on the lattice, can be used with SuperSum3D as objective More... | |
| class | SuperLatticePhysDissipation2D |
| functor to get pointwise dissipation density on local lattices More... | |
| class | SuperLatticePhysDissipation3D |
| functor to get pointwise dissipation density on local lattices More... | |
| class | SuperLatticePhysDissipationFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticePhysDrag2D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | SuperLatticePhysDrag3D |
| functor to get pointwise phys force acting on a indicated boundary on local lattice More... | |
| class | SuperLatticePhysEffectiveDissipation3D |
| functor to get pointwise turbulent dissipation density on local lattices More... | |
| class | SuperLatticePhysEffectiveDissipationFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticePhysEnstrophyFD3D |
| class | SuperLatticePhysExternalParticleVelocity2D |
| class | SuperLatticePhysExternalParticleVelocity3D |
| class | SuperLatticePhysExternalPorosity2D |
| class | SuperLatticePhysExternalPorosity3D |
| class | SuperLatticePhysExternalScalar2D |
| class | SuperLatticePhysExternalScalar3D |
| class | SuperLatticePhysExternalVelocity2D |
| class | SuperLatticePhysExternalVelocity3D |
| class | SuperLatticePhysExternalZeta2D |
| class | SuperLatticePhysF2D |
| represents all functors that operate on a DESCRIPTOR with output in Phys, e.g. physVelocity(), physForce(), physPressure() More... | |
| class | SuperLatticePhysF3D |
| represents all functors that operate on a DESCRIPTOR with output in Phys, e.g. physVelocity(), physForce(), physPressure() More... | |
| struct | SuperLatticePhysField2D |
| struct | SuperLatticePhysField3D |
| class | SuperLatticePhysHeatFlux2D |
| functor to get pointwise heat flux on local lattice More... | |
| class | SuperLatticePhysHeatFlux3D |
| functor to get pointwise heat flux on local lattice More... | |
| class | SuperLatticePhysHeatFluxBoundary3D |
| functor to get pointwise phys heat flux on a boundary with a given material on local lattice More... | |
| class | SuperLatticePhysPermeability2D |
| functor to get pointwise mesh-independent permeability values in (0,inf) in combination with (Extended)PorousBGKdynamics note: result is cropped to 999999 More... | |
| class | SuperLatticePhysPermeability3D |
| functor to get pointwise mesh-independent permeability values in (0,inf) in combination with (Extended)PorousBGKdynamics note: result is cropped to 999999 More... | |
| class | SuperLatticePhysPoreSizeDistribution3D |
| functor returns pointwise pore radius (in m) for packings of spheres given by an xmlReader returns NAN for non-pore voxels More... | |
| class | SuperLatticePhysPressure2D |
| functor to get pointwise phys pressure from rho on local lattices More... | |
| class | SuperLatticePhysPressure3D |
| functor to get pointwise phys pressure from rho on local lattices More... | |
| class | SuperLatticePhysShearRateMag3D |
| functor to get pointwise phys shear rate magnitude on local lattice More... | |
| class | SuperLatticePhysStrainRate2D |
| functor to get pointwise phys strain rate on local lattice s_ij = 1/2*(du_idr_j + du_jdr_i) More... | |
| class | SuperLatticePhysStrainRate3D |
| functor to get pointwise phys strain rate on local lattice s_ij = 1/2*(du_idr_j + du_jdr_i) More... | |
| class | SuperLatticePhysStrainRateFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticePhysStressFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticePhysTauFromBoundaryDistance3D |
| functor returns pointwise pore radius (in m) for packings of spheres given by an xmlReader returns NAN for non-pore voxels More... | |
| class | SuperLatticePhysTemperature2D |
| functor to get pointwise phys temperature from rho on local lattices More... | |
| class | SuperLatticePhysTemperature3D |
| functor to get pointwise phys temperature from rho on local lattices More... | |
| class | SuperLatticePhysVelocity2D |
| functor to get pointwise phys velocity on local lattice More... | |
| class | SuperLatticePhysVelocity3D |
| functor to get pointwise phys velocity on local lattice More... | |
| class | SuperLatticePhysVelocityGradientFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticePhysViscosity2D |
| functor to get pointwise phys viscosity on local lattices More... | |
| class | SuperLatticePhysViscosity3D |
| functor to get pointwise phys viscosity on local lattices More... | |
| class | SuperLatticePhysVorticityFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticePhysWallShearStress2D |
| functor to get pointwise phys wall shear stress with a given material on local lattice More... | |
| class | SuperLatticePhysWallShearStress3D |
| functor to get pointwise phys wall shear stress with a given material on local lattice More... | |
| struct | SuperLatticePlatform |
| class | SuperLatticePorosity2D |
| functor to get pointwise, lattice-dependent porosity values in [0,1] in combination with (Extended)PorousBGKdynamics: 0->solid, 1->fluid More... | |
| class | SuperLatticePorosity3D |
| functor to get pointwise, lattice-dependent porosity values in [0,1] in combination with (Extended)PorousBGKdynamics: 0->solid, 1->fluid More... | |
| class | SuperLatticePSMPhysForce2D |
| functor to get pointwise phys force for the PSM dynamics More... | |
| class | SuperLatticePSMPhysForce2DMod |
| functor to get pointwise phys force for the PSM dynamics More... | |
| class | SuperLatticePSMPhysForce3D |
| functor to get pointwise phys force for the PSM dynamics More... | |
| class | SuperLatticeRank2D |
| functor to get pointwise the rank no. + 1 on local lattice More... | |
| class | SuperLatticeRank3D |
| functor to get pointwise the rank no. + 1 on local lattice More... | |
| class | SuperLatticeRefinementMetricKnudsen2D |
| SuperLatticeRefinementMetricKnudsen2D suggests a per-block grid refinement factor. More... | |
| class | SuperLatticeRefinementMetricKnudsen3D |
| SuperLatticeRefinementMetricKnudsen3D suggests a per-block grid refinement factor. More... | |
| class | SuperLatticeSmoothDiracDelta3D |
| class | SuperLatticeStrainRate3D |
| functor to get pointwise strain rate on local lattice s_ij = 1/2*(du_idr_j + du_jdr_i) More... | |
| class | SuperLatticeStrainRateFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticeThermalComfort3D |
| functor to get pointwise PMV and PPD on local lattices to evaluate thermal comfort More... | |
| class | SuperLatticeThermalPhysF2D |
| represents all thermal functors that operate on a DESCRIPTOR with output in Phys, e.g. physTemperature(), physHeatFlux() More... | |
| class | SuperLatticeThermalPhysF3D |
| represents all thermal functors that operate on a DESCRIPTOR with output in Phys, e.g. physTemperature(), physHeatFlux() More... | |
| class | SuperLatticeTimeAveraged2DL2Norm |
| class | SuperLatticeTimeAveraged3DL2Norm |
| class | SuperLatticeTimeAveragedCrossCorrelationF2D |
| class | SuperLatticeTimeAveragedCrossCorrelationF3D |
| class | SuperLatticeTimeAveragedF2D |
| class | SuperLatticeTimeAveragedF3D |
| class | SuperLatticeTimeAveragedMagnitudesF3D |
| class | SuperLatticeTimeStepScale3D |
| functor to scale particle distributions to a time step More... | |
| class | SuperLatticeVelocity2D |
| functor to get pointwise velocity on local lattice More... | |
| class | SuperLatticeVelocity3D |
| functor to get pointwise velocity on local lattice More... | |
| class | SuperLatticeVelocityDenominator3D |
| class | SuperLatticeVelocityGradientFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticeVolumeFractionApproximation2D |
| functor to get pointwise an approx. for the volume fraction More... | |
| class | SuperLatticeVolumeFractionApproximation3D |
| functor to get pointwise an approx. for the volume fraction More... | |
| class | SuperLatticeVolumeFractionPolygonApproximation2D |
| functor to get pointwise an approx. for the volume fraction More... | |
| class | SuperLatticeVorticityFD3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperLatticeYplus3D |
| functor to get pointwise yPlus from rho, shear stress and local density on local lattices More... | |
| class | SuperLocalAverage2D |
| Averages given functor inside the local sphere. More... | |
| class | SuperLocalAverage3D |
| Averages given functor inside the local sphere. More... | |
| class | SuperLpNorm2D |
| Functor that returns the Lp norm over omega of the the euklid norm of the input functor. More... | |
| class | SuperLpNorm3D |
| Functor that returns the Lp norm over omega of the the euklid norm of the input functor. More... | |
| class | SuperMax2D |
| SuperMax2D returns the max in each component of f on a indicated subset. More... | |
| class | SuperMax3D |
| SuperMax3D returns the max in each component of f on a indicated subset. More... | |
| class | SuperMin2D |
| SuperMin2D returns the min in each component of f on a indicated subset. More... | |
| class | SuperMin3D |
| SuperMin3D returns the min in each component of f on a indicated subset. More... | |
| class | SuperParticleGroupedFieldF |
| class | SuperParticleSystem3D |
| The class superParticleSystem is the basis for particulate flows within OpenLB. More... | |
| class | SuperParticleSysVtuWriter |
| class | SuperParticleSysVtuWriterMag |
| class | SuperPhysFiniteDifference3D |
| functor to get pointwise explicit filter on local lattice, if globIC is not on the local processor, the returned vector is empty More... | |
| class | SuperPhysLaplacian3D |
| functor to get pointwise finite difference Laplacian operator More... | |
| class | SuperPlaneIntegralF2D |
| Surface integral of a subset of a interpolated hyperplane. More... | |
| class | SuperPlaneIntegralF3D |
| Surface integral of a subset of a interpolated hyperplane. More... | |
| class | SuperPlaneIntegralFluxF2D |
| Template class for building flux integrals based on SuperLatticePhysF2D functors. More... | |
| class | SuperPlaneIntegralFluxF3D |
| Template class for building flux integrals based on SuperLatticePhysF3D functors. More... | |
| class | SuperPlaneIntegralFluxMass2D |
| Mass flux line integral. More... | |
| class | SuperPlaneIntegralFluxMass3D |
| Mass flux plane integral. More... | |
| class | SuperPlaneIntegralFluxPressure2D |
| Pressure flux line integral. More... | |
| class | SuperPlaneIntegralFluxPressure3D |
| Pressure flux plane integral. More... | |
| class | SuperPlaneIntegralFluxVelocity2D |
| Velocity flux line integral. More... | |
| class | SuperPlaneIntegralFluxVelocity3D |
| Velocity flux plane integral. More... | |
| class | SuperRelativeErrorLpNorm2D |
| Relative error norm functor. More... | |
| class | SuperRelativeErrorLpNorm3D |
| Relative error norm functor. More... | |
| class | SuperRoundingF2D |
| Super functor for rounding the value in a certain mode: None := No rounding NearestInteger := rounding to nearest integer Floor:= rounding to nearest lower integer Ceil := rounding to nearest higher integer. More... | |
| class | SuperRoundingF3D |
| Super functor for rounding the value in a certain mode: None := No rounding NearestInteger := rounding to nearest integer Floor:= rounding to nearest lower integer Ceil := rounding to nearest higher integer. More... | |
| class | SuperStdDeviationF3D |
| SuperStdDeviaitonF3D returns the standard deviation in each component of f on a indicated subset calcutalted with Steiner translation theorem. More... | |
| class | SuperStructure |
| class | SuperStructure2D |
| class | SuperStructure3D |
| class | SuperSum2D |
| SuperSum2D sums all components of f over a indicated subset. More... | |
| class | SuperSum3D |
| SuperSum3D sums all components of f over a indicated subset. More... | |
| class | SuperTypecastF3D |
| perform explicit typecast from output type W2 to W More... | |
| class | SuperVarianceF3D |
| SuperVarianceF3D returns the Variance in each component of f on a indicated subset calcutalted with Steiner translation theorem. More... | |
| class | SuperVTIreader3D |
| class | SuperVTMwriter2D |
| SuperVTMwriter2D writes any SuperF2D to vtk-based output files. More... | |
| class | SuperVTMwriter3D |
| SuperVTMwriter3D writes any SuperF3D to vtk-based output files. More... | |
| class | ThermalUnitConverter |
| Conversion between physical and lattice units, as well as discretization specialized for thermal applications with boussinesq approximation. More... | |
| class | ThreadPool |
| Pool of threads for CPU-based background processing. More... | |
| struct | TotalEnthalpyAdvectionDiffusionBGKdynamics |
| struct | TotalEnthalpyAdvectionDiffusionTRTdynamics |
| struct | TotalEnthalpyPhaseChangeCoupling |
| TotalEnthalpyPhaseChange between a Navier-Stokes and an Advection-Diffusion lattice. More... | |
| class | TotalEnthalpyPhaseChangeCouplingGenerator2D |
| class | TotalEnthalpyPhaseChangeCouplingGenerator3D |
| class | TotalEnthalpyPhaseChangeCouplingPostProcessor2D |
| class | TotalEnthalpyPhaseChangeCouplingPostProcessor3D |
| class | TransferExternalForce3D |
| class | TwoWayHelperFunctional |
| Abstact class for all the local forward-coupling models, viz., momentum coupling from fluid to particle. More... | |
| struct | U_PROFILE |
| class | UnitConverter |
| Conversion between physical and lattice units, as well as discretization. More... | |
| struct | UnitConverterBase |
| class | UnitConverterFromRelaxationTimeAndLatticeVelocity |
| class | UnitConverterFromResolutionAndLatticeVelocity |
| class | UnitConverterFromResolutionAndRelaxationTime |
| struct | VANSADECoupling |
| VANS-ADE coupling. More... | |
| class | vanWachemForwardCouplingModel |
| Class for a forward-coupling model as in Evrard, Denner and van Wachem (2019), but with an extra-normalization of the smoothing function. More... | |
| class | vanWachemSmoothingFunctional |
| Smoothing functional as in Evrard, Denner and van Wachem (2019). More... | |
| class | Vector |
| Plain old scalar vector. More... | |
| struct | VELOCITY_OLD |
| class | VelocityBounceBackPostProcessor2D |
| class | VelocityBounceBackPostProcessor3D |
| class | VelocityBounceBackPostProcessorGenerator2D |
| class | VelocityBounceBackPostProcessorGenerator3D |
| class | VelocityBouzidiLinearPostProcessor2D |
| class | VelocityBouzidiLinearPostProcessor3D |
| class | VelocityBouzidiLinearPostProcessorGenerator2D |
| class | VelocityBouzidiLinearPostProcessorGenerator3D |
| struct | Vertex |
| class | VolumeAveragedNavierStokesAdvectionDiffusionParticleCouplingGenerator3D |
| class | VolumeAveragedNavierStokesAdvectionDiffusionParticleCouplingPostProcessor3D |
| class | VolumeAveragingSmoothingFunctional |
| Abstact class for all the volume-averaging smoothing functionals. More... | |
| struct | VortexMethodPostProcessor |
| struct | VortexMethodPreProcessor |
| class | VortexMethodTurbulentVelocityBoundary |
| class | VTIwriter3D |
| class | VTKwriter |
| class | WallFunctionBoundaryProcessor3D |
| class | WallFunctionBoundaryProcessorGenerator3D |
| struct | wallFunctionParam |
| class | WeightForce3D |
| class | WeisbrodKrause |
| class | WireBoundaryForMagP3D |
| struct | WriteCellFunctional |
| class | XMLreader |
| class | XMLreaderOutput |
| class | YuPostProcessor |
| class | ZeroDistributionBoundaryProcessor3D |
| This class resets some values of the distribution on the boundary that can have arbitrary values to be zero and thus ensures a correct computation of the density that is about to leave the domain. More... | |
| class | ZeroDistributionBoundaryProcessorGenerator3D |
| struct | ZeroDistributionDynamics |
| Models a density sink by enforcing a zero distribution on the cell. More... | |
| struct | zeroGradientLatticePostProcessor3D |
| class | ZeroVelocityBounceBackPostProcessor2D |
| class | ZeroVelocityBounceBackPostProcessor3D |
| class | ZeroVelocityBounceBackPostProcessorGenerator2D |
| class | ZeroVelocityBounceBackPostProcessorGenerator3D |
| class | ZeroVelocityBouzidiLinearPostProcessor2D |
| class | ZeroVelocityBouzidiLinearPostProcessor3D |
| This class computes the Linear Bouzidi BC. More... | |
| class | ZeroVelocityBouzidiLinearPostProcessorGenerator2D |
| class | ZeroVelocityBouzidiLinearPostProcessorGenerator3D |
| Linear Bouzidi BC Generator. More... | |
| class | ZouHeDynamics |
| Implementation of Zou-He boundary condition following the paper from Zou and He. More... | |
Typedefs | |
| template<typename T , typename DESCRIPTOR , typename DYNAMICS , typename MOMENTA , int... ARGS> | |
| using | AdvectionLocalDiffusionBoundariesDynamics |
| template<typename T , typename DESCRIPTOR , typename DYNAMICS , typename MOMENTA , int... ARGS> | |
| using | AdvectionLocalDiffusionEdgesDynamics |
| template<typename T , typename DESCRIPTOR , typename DYNAMICS , typename MOMENTA , int... NORMAL> | |
| using | AdvectionLocalDiffusionCornerDynamics2D |
| template<typename T , typename DESCRIPTOR , typename DYNAMICS , typename MOMENTA , int... NORMAL> | |
| using | AdvectionLocalDiffusionCornerDynamics3D |
| template<typename T > | |
| using | BaseType = typename util::BaseTypeHelper<T>::type |
| using | CellID = std::uint32_t |
| Type for sequential block-local cell indices. | |
| using | CellDistance = std::int64_t |
| Type for in-memory distance of block-local cell indices. | |
| template<unsigned D> | |
| using | LatticeR = Vector<std::int32_t,D> |
| Type for spatial block-local lattice coordinates. | |
| template<typename T , unsigned D> | |
| using | PhysR = Vector<T,D> |
| Type for spatial (physical) coordinates. | |
| template<typename DESCRIPTOR > | |
| using | BlockStructure = BlockStructureD<DESCRIPTOR::d> |
| template<typename T , typename DESCRIPTOR , typename FIELD > | |
| using | FieldD |
| Vector storing a single field instance. | |
| template<typename T , typename DESCRIPTOR , Platform PLATFORM = Platform::CPU_SISD> | |
| using | MultiFieldArrayForDescriptorD = typename MultiFieldArrayForDescriptorHelper<T,DESCRIPTOR,PLATFORM>::type |
| MultiFieldArrayD containing each field in DESCRIPTOR::fields_t. | |
| template<typename T , typename DESCRIPTOR , typename OPERATOR > | |
| using | ParametersOfOperatorD |
| Deduce ParametersD of OPERATOR w.r.t. T and DESCRIPTOR. | |
| template<typename DYNAMICS > | |
| using | ParametersOfDynamicsD |
| Deduce ParametersD of DYNAMICS w.r.t. its value type and descriptor. | |
| template<typename T > | |
| using | Column = cpu::sisd::Column<T> |
| Use CPU SISD as default Column. | |
| template<typename T > | |
| using | CyclicColumn = cpu::sisd::CyclicColumn<T> |
| Use CPU SISD as default CyclicColumn. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::AdvectionDiffusionBulkTuple> | |
| using | AdvectionDiffusionRLBdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::AdvectionDiffusionBulkTuple> | |
| using | AdvectionDiffusionBGKdynamics |
| This approach contains a slight error in the diffusion term. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::AdvectionDiffusionBulkTuple> | |
| using | AdvectionDiffusionTRTdynamics |
| This approach contains a slight error in the diffusion term. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::AdvectionDiffusionBulkTuple> | |
| using | AdvectionDiffusionMRTdynamics |
| This approach is based on the multi-distribution LBM model. | |
| template<typename T , typename DESCRIPTOR > | |
| using | NoCollideDynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | CUMdynamics |
| Implementation partially based on: Geier, Martin, et al. | |
| template<typename T , typename DESCRIPTOR > | |
| using | NoDynamics |
| Dynamics for "dead cells" doing nothing. | |
| template<typename T , typename DESCRIPTOR > | |
| using | NoDynamicsWithZero |
| Dynamics for "dead cells" doing nothing. Variant with density=0. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | BGKdynamics |
| Common BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ConstRhoBGKdynamics |
| Pressure-corrected BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ForcedBGKdynamics |
| BGK collision step with external force (Guo) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::ExternalVelocityTuple> | |
| using | MultiComponentForcedBGKdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ForcedKupershtokhBGKdynamics |
| BGK collision step with external force (Kupershtokh) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ForcedShanChenBGKdynamics |
| BGK collision step with external force (Shan and Chen) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | IncBGKdynamics = dynamics::Tuple<T,DESCRIPTOR,MOMENTA,equilibria::Incompressible,collision::BGK> |
| Incompressible BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ForcedIncBGKdynamics |
| Incompressible BGK collision step with external force. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ExternalTauForcedIncBGKdynamics |
| Incompressible BGK collision step with relaxation frequency 1 / TAU_EFF and external force. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | RLBdynamics |
| Regularized BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | TRTdynamics |
| TRT collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ForcedTRTdynamics |
| TRT collision step with external force. | |
| template<typename T , typename DESCRIPTOR > | |
| using | BounceBack |
| Bounce Back boundary dynamics. | |
| template<typename T , typename DESCRIPTOR > | |
| using | BounceBackBulkDensity |
| Bounce Back boundary dynamics with bulk density. | |
| template<typename T , typename DESCRIPTOR > | |
| using | BounceBackVelocity |
| Bounce Back boundary dynamics with Nguyen-Ladd velocity correction. | |
| template<typename T , typename DESCRIPTOR > | |
| using | PartialBounceBack |
| Corresponds to macro Robin boundary, micro Fresnel surface Motivated by Hiorth et al. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::PoissonTuple> | |
| using | PoissonDynamics |
| Poisson dynamics. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::P1Tuple> | |
| using | P1Dynamics |
| P1 dynamics. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA > | |
| using | ChopardDynamics |
| template<typename T , typename DESCRIPTOR > | |
| using | EquilibriumBoundaryFirstOrder |
| First order equilibrium boundary dynamics. | |
| template<typename T , typename DESCRIPTOR > | |
| using | EquilibriumBoundarySecondOrder |
| Second order equilibrium boundary dynamics. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::FreeEnergyBulkTuple> | |
| using | FreeEnergyBGKdynamics |
| template<typename T , typename DESCRIPTOR > | |
| using | FreeEnergyWallDynamics |
| template<typename T , typename DESCRIPTOR , int direction, int orientation> | |
| using | FreeEnergyInletOutletDynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | GuoZhaoBGKdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyGuoZhaoBGKdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | KBCdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | MRTdynamics |
| Original implementation based on: D'Humieres et al., "Multiple-relaxation-time lattice Boltzmann models in three dimensions", Phil: Trans. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ForcedMRTdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousBGKdynamics |
| Porous BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticleBGKdynamics |
| Porous particle BGK collision for moving particles. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | StaticPorousParticleBGKdynamics |
| Porous particle BGK collision for static particles. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyPorousParticleBGKdynamics |
| BGK collision step for a porosity model. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SubgridParticleBGKdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | DBBParticleBGKdynamics |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | KrauseHBGKdynamics |
| HBGK collision step for a porosity model enabling drag computation for many particles including the Krause turbulence modell. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmallParticleBGKdymaics |
| BGK collision step for a small particles enabling two way coupling. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PSMBGKdynamics |
| Partially Saturated Method (PSM), see Krüger, Timm, et al. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousForcedBGKdynamics |
| BGK collision step for a porosity model. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticleGuoForcedBGKdynamics |
| Guo forced BGK collision for moving porous media (HLBM approach) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | StaticPorousParticleGuoForcedBGKdynamics |
| Guo forced BGK static collision for moving porous media (HLBM approach) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticleShanChenForcedBGKdynamics |
| ShanChen forced BGK collision for moving porous media (HLBM approach) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | StaticPorousParticleShanChenForcedBGKdynamics |
| ShanChen forced BGK static collision for moving porous media (HLBM approach) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticleKupershtokhForcedBGKdynamics |
| Kuperstokh forced BGK collision for moving porous media (HLBM approach) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | StaticPorousParticleKupershtokhForcedBGKdynamics |
| Kuperstokh forced BGK static collision for moving porous media (HLBM approach) | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticlePowerLawBGKdynamics |
| BGK collision using Power Law collision frequency. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticlePowerLawForcedBGKdynamics |
| BGK collision using Power Law collision frequency with Guo forcing. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticlePowerLawHerschelBulkleyBGKdynamics |
| BGK collision using Power Law (Herschel Bulkley) collision frequency. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PorousParticlePowerLawHerschelBulkleyForcedBGKdynamics |
| BGK collision using Power Law (Herschel Bulkley) collision frequency with Guo forcing. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PowerLawBGKdynamics |
| BGK collision using Power Law collision frequency. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PowerLawForcedBGKdynamics |
| BGK collision using Power Law collision frequency with Guo forcing. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PowerLawHerschelBulkleyBGKdynamics |
| BGK collision using Power Law (Herschel Bulkley) collision frequency. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | PowerLawHerschelBulkleyForcedBGKdynamics |
| BGK collision using Power Law (Herschel Bulkley) collision frequency with Guo forcing. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyPowerLawBGKdynamics |
| Smagorinsky BGK collision using Power Law collision frequency. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyPowerLawForcedBGKdynamics |
| Smagorinsky BGK collision using Power Law collision frequency and Guo forcing. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyPowerLawPorousParticleBGKdynamics |
| Smagorinsky BGK collision using Power Law collision frequency for porous particles. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyBGKdynamics |
| Smagorinsky BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyForcedBGKdynamics |
| Smagorinsky BGK collision step with Guo forcing. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ExternalTauEffLESBGKdynamics |
| LES BGK collision using non-local TAU_EFF per-cell field. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ExternalTauEffLESForcedBGKdynamics |
| LES BGK collision with Guo forcing using non-local TAU_EFF per-cell field. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ShearSmagorinskyBGKdynamics |
| Shear Smarorinsky BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ShearSmagorinskyForcedBGKdynamics |
| Shear Smarorinsky BGK collision step with Guo forcing. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ExternalTauEffLESBGKadvectionDiffusionDynamics |
| LES BGK collision for advection diffusion using non-local TAU_EFF per-cell field. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ConStrainSmagorinskyBGKdynamics |
| Consistent Strain Smagorinsky BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ConSmagorinskyBGKdynamics |
| Consistent Smagorinsky BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | ExternalSmagorinskyBGKdynamics |
| Smagorinsky BGK collision step with per-cell Smagorinsky constant. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | WALEBGKdynamics |
| WALE LES BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | KrauseBGKdynamics |
| Krause BGK collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyLinearVelocityForcedBGKdynamics |
| ForcedBGK collision step computing OMEGA locally using Smagorinsky LES model. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyMRTdynamics |
| Smagorinsky MRT collision step. | |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | SmagorinskyForcedMRTdynamics |
| Smagorinsky MRT collision step with Ladd-Verberg forcing. | |
| template<typename T , typename S > | |
| using | AnalyticalF1D = AnalyticalF<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalF2D = AnalyticalF<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalF3D = AnalyticalF<3,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalIdentity1D = AnalyticalIdentity<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalIdentity2D = AnalyticalIdentity<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalIdentity3D = AnalyticalIdentity<3,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalConst1D = AnalyticalConst<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalConst2D = AnalyticalConst<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalConst3D = AnalyticalConst<3,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalComposed2D = AnalyticalComposed<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalComposed3D = AnalyticalComposed<3,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalRandom1D = AnalyticalRandomOld<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalRandom2D = AnalyticalRandomOld<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticalRandom3D = AnalyticalRandomOld<3,T,S> |
| template<unsigned D, typename T , typename S > | |
| using | AnalyticCalcPlus = AnalyticCalcF<D,T,S,util::plus> |
| addition functor | |
| template<typename T , typename S > | |
| using | AnalyticCalcPlus1D = AnalyticCalcPlus<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcPlus2D = AnalyticCalcPlus<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcPlus3D = AnalyticCalcPlus<3,T,S> |
| template<unsigned D, typename T , typename S > | |
| using | AnalyticCalcMinus = AnalyticCalcF<D,T,S,util::minus> |
| subtraction functor | |
| template<typename T , typename S > | |
| using | AnalyticCalcMinus1D = AnalyticCalcMinus<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcMinus2D = AnalyticCalcMinus<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcMinus3D = AnalyticCalcMinus<3,T,S> |
| template<unsigned D, typename T , typename S > | |
| using | AnalyticCalcMultiplication = AnalyticCalcF<D,T,S,util::multiplies> |
| multiplication functor | |
| template<typename T , typename S > | |
| using | AnalyticCalcMultiplication1D = AnalyticCalcMultiplication<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcMultiplication2D = AnalyticCalcMultiplication<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcMultiplication3D = AnalyticCalcMultiplication<3,T,S> |
| template<unsigned D, typename T , typename S > | |
| using | AnalyticCalcDivision = AnalyticCalcF<D,T,S,util::divides> |
| division functor | |
| template<typename T , typename S > | |
| using | AnalyticCalcDivision1D = AnalyticCalcDivision<1,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcDivision2D = AnalyticCalcDivision<2,T,S> |
| template<typename T , typename S > | |
| using | AnalyticCalcDivision3D = AnalyticCalcDivision<3,T,S> |
| template<typename T > | |
| using | BlockCalcPlus2D = BlockCalcF2D<T,util::plus> |
| Block level addition functor (T==bool: Union) | |
| template<typename T > | |
| using | BlockCalcMinus2D = BlockCalcF2D<T,util::minus> |
| Block level subtraction functor (T==bool: Without) | |
| template<typename T > | |
| using | BlockCalcMultiplication2D = BlockCalcF2D<T,util::multiplies> |
| Block level multiplication functor (T==bool: Intersection) | |
| template<typename T > | |
| using | BlockCalcDivision2D = BlockCalcF2D<T,util::divides> |
| Block level division functor. | |
| template<typename T > | |
| using | BlockCalcPlus3D = BlockCalcF3D<T,util::plus> |
| Block level addition functor (T==bool: Union) | |
| template<typename T > | |
| using | BlockCalcMinus3D = BlockCalcF3D<T,util::minus> |
| Block level subtraction functor (T==bool: Without) | |
| template<typename T > | |
| using | BlockCalcMultiplication3D = BlockCalcF3D<T,util::multiplies> |
| Block level multiplication functor (T==bool: Intersection) | |
| template<typename T > | |
| using | BlockCalcDivision3D = BlockCalcF3D<T,util::divides> |
| Block level division functor. | |
| template<typename T , typename W = T> | |
| using | SuperL1Norm2D = SuperLpNorm2D<T,W,1> |
| Functor that returns the L1 norm over omega of the the euklid norm of the input functor. | |
| template<typename T , typename W = T> | |
| using | SuperL2Norm2D = SuperLpNorm2D<T,W,2> |
| Functor that returns the L2 norm over omega of the the euklid norm of the input functor. | |
| template<typename T , typename W = T> | |
| using | SuperLinfNorm2D = SuperLpNorm2D<T,W,0> |
| Functor that returns the Linf norm over omega of the the euklid norm of the input functor. | |
| template<typename T , typename W = T> | |
| using | SuperL1Norm3D = SuperLpNorm3D<T,W,1> |
| Functor that returns the L1 norm over omega of the the euklid norm of the input functor. | |
| template<typename T , typename W = T> | |
| using | SuperL2Norm3D = SuperLpNorm3D<T,W,2> |
| Functor that returns the L2 norm over omega of the the euklid norm of the input functor. | |
| template<typename T , typename W = T> | |
| using | SuperLinfNorm3D = SuperLpNorm3D<T,W,0> |
| Functor that returns the Linf norm over omega of the the euklid norm of the input functor. | |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE > | |
| using | SuperLatticeMomentumExchangeForce |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE > | |
| using | SuperLatticeStokesDragForce |
| template<typename T , typename W > | |
| using | SuperCalcPlus2D = SuperCalcF2D<T,W,util::plus> |
| Addition functor (W==bool: Union) | |
| template<typename T , typename W > | |
| using | SuperCalcMinus2D = SuperCalcF2D<T,W,util::minus> |
| Subtraction functor (W==bool: Without) | |
| template<typename T , typename W > | |
| using | SuperCalcMultiplication2D = SuperCalcF2D<T,W,util::multiplies> |
| Multiplication functor (W==bool: Intersection) | |
| template<typename T , typename W > | |
| using | SuperCalcDivision2D = SuperCalcF2D<T,W,util::divides> |
| Division functor. | |
| template<typename T , typename W = T> | |
| using | SuperCalcPower2D = SuperCalcF2D<T,W,util::power> |
| Power functor. | |
| template<typename T , typename W = T> | |
| using | SuperCalcPlus3D = SuperCalcF3D<T,W,util::plus> |
| Addition functor (W==bool: Union) | |
| template<typename T , typename W = T> | |
| using | SuperCalcMinus3D = SuperCalcF3D<T,W,util::minus> |
| Subtraction functor (W==bool: Without) | |
| template<typename T , typename W = T> | |
| using | SuperCalcMultiplication3D = SuperCalcF3D<T,W,util::multiplies> |
| Multiplication functor (W==bool: Intersection) | |
| template<typename T , typename W = T> | |
| using | SuperCalcDivision3D = SuperCalcF3D<T,W,util::divides> |
| Division functor. | |
| template<typename T , typename W = T> | |
| using | SuperCalcPower3D = SuperCalcF3D<T,W,util::power> |
| Power functor. | |
| template<typename T , typename W = T> | |
| using | SuperRelativeErrorL1Norm2D = SuperRelativeErrorLpNorm2D<T,W,1> |
| template<typename T , typename W = T> | |
| using | SuperRelativeErrorL2Norm2D = SuperRelativeErrorLpNorm2D<T,W,2> |
| template<typename T , typename W = T> | |
| using | SuperRelativeErrorLinfNorm2D = SuperRelativeErrorLpNorm2D<T,W,0> |
| template<typename T , typename W = T> | |
| using | SuperAbsoluteErrorL1Norm2D = SuperAbsoluteErrorLpNorm2D<T,W,1> |
| template<typename T , typename W = T> | |
| using | SuperAbsoluteErrorL2Norm2D = SuperAbsoluteErrorLpNorm2D<T,W,2> |
| template<typename T , typename W = T> | |
| using | SuperAbsoluteErrorLinfNorm2D = SuperAbsoluteErrorLpNorm2D<T,W,0> |
| template<typename T , typename W = T> | |
| using | SuperRelativeErrorL1Norm3D = SuperRelativeErrorLpNorm3D<T,W,1> |
| template<typename T , typename W = T> | |
| using | SuperRelativeErrorL2Norm3D = SuperRelativeErrorLpNorm3D<T,W,2> |
| template<typename T , typename W = T> | |
| using | SuperRelativeErrorLinfNorm3D = SuperRelativeErrorLpNorm3D<T,W,0> |
| template<typename T , typename W = T> | |
| using | SuperAbsoluteErrorL1Norm3D = SuperAbsoluteErrorLpNorm3D<T,W,1> |
| template<typename T , typename W = T> | |
| using | SuperAbsoluteErrorL2Norm3D = SuperAbsoluteErrorLpNorm3D<T,W,2> |
| template<typename T , typename W = T> | |
| using | SuperAbsoluteErrorLinfNorm3D = SuperAbsoluteErrorLpNorm3D<T,W,0> |
| template<typename T > | |
| using | BlockGeometry2D = BlockGeometry<T,2> |
| template<typename T > | |
| using | BlockGeometry3D = BlockGeometry<T,3> |
| template<typename T , typename DESCRIPTOR , bool parallel = true> | |
| using | VTUwriter |
| template<typename T , typename DESCRIPTOR > | |
| using | VTIwriter |
| template<typename T , typename DESCRIPTOR , typename MOMENTA = momenta::BulkTuple> | |
| using | DualPorousBGKDynamics |
| template<typename T , unsigned D> | |
| using | Cuboid |
| template<typename T , unsigned D> | |
| using | CuboidGeometry |
| template<typename T , unsigned D> | |
| using | Communicator |
| template<typename T , typename DESCRIPTOR > | |
| using | PostProcessor |
| template<typename T , typename DESCRIPTOR > | |
| using | PostProcessorGenerator |
| template<typename T , unsigned DIM> | |
| using | SuperGeometryStatistics |
| template<typename T , unsigned DIM, typename OUT_T = float, typename W = T> | |
| using | SuperVTMwriter |
| template<typename T , typename DESCRIPTOR > | |
| using | SuperLatticeGeometry |
| template<typename T , typename DESCRIPTOR > | |
| using | SuperLatticeCuboid |
| template<typename T , typename DESCRIPTOR > | |
| using | SuperLatticeRank |
| template<typename T , typename DESCRIPTOR > | |
| using | SuperLatticeF |
| template<typename T , typename DESCRIPTOR > | |
| using | BlockLatticeF |
| template<typename T , typename DESCRIPTOR > | |
| using | LatticeCouplingGenerator |
| template<typename T , unsigned D> | |
| using | BlockGeometryStatistics |
| template<typename T , unsigned D> | |
| using | BlockF |
| template<unsigned D, typename T , typename U = T> | |
| using | SuperF |
| template<typename T , unsigned D> | |
| using | SuperIndicatorF |
| template<typename T , unsigned D> | |
| using | BlockIndicatorF |
| template<typename T , unsigned D> | |
| using | BlockIndicatorMaterial |
| template<typename T , unsigned D> | |
| using | BlockIndicatorBoundaryNeighbor |
| template<typename T , unsigned D> | |
| using | BlockIndicatorFfromIndicatorF |
| template<typename T , unsigned D> | |
| using | IndicatorF |
| template<typename T , unsigned D> | |
| using | IndicatorCuboid |
| template<typename T , typename S , unsigned D, bool PARTICLE = false> | |
| using | SmoothIndicatorF |
| template<typename T , unsigned D> | |
| using | SuperIndicatorFfromIndicatorF |
| template<typename T , unsigned D> | |
| using | SuperIndicatorMaterial |
| template<typename T , unsigned D> | |
| using | SuperIndicatorBoundaryNeighbor |
| template<typename T , typename DESCRIPTOR , typename FIELD > | |
| using | SuperField |
| template<typename T , typename DESCRIPTOR > | |
| using | SuperLatticePhysF |
| template<typename T , typename DESCRIPTOR > | |
| using | BlockLatticePhysF |
| template<typename T , typename DESCRIPTOR > | |
| using | SuperLatticeInterpPhysVelocity |
| template<typename T , typename DESCRIPTOR > | |
| using | BlockLatticeInterpPhysVelocity |
Enumerations | |
| enum struct | OperatorScope { PerCell , PerBlock , PerCellWithParameters } |
| Block-wide operator application scopes. More... | |
| enum struct | CollisionDispatchStrategy { Dominant , Individual } |
| Collision dispatch strategy. More... | |
| enum struct | Platform : std::uint8_t { CPU_SISD , CPU_SIMD , GPU_CUDA } |
| OpenLB execution targets. More... | |
| enum struct | ProcessingContext { Evaluation , Simulation } |
| OpenLB processing contexts. More... | |
| enum | vtkType { VTI , VTU , VTP } |
| enum class | BlockDataReductionMode { Analytical , Discrete } |
| Mode of reducing block data from given, possibly higher dimensional data. More... | |
| enum class | BlockDataSyncMode { ReduceAndBcast , ReduceOnly , None } |
| Mode of synchronizing functor block data between processes. More... | |
| enum class | RoundingMode { None , NearestInteger , Floor , Ceil } |
| Mode of how to decide Quality of Grid. More... | |
Functions | |
| template<typename T , typename DESCRIPTOR > | |
| void | setAdvectionDiffusionConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the AdvectionDiffusionConvectionBoundary function on the superLattice domain This is an Advection Diffusion Boundary therefore mostly--> MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR> | |
| template<typename T , typename DESCRIPTOR > | |
| void | setAdvectionDiffusionConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the AdvectionDiffusionConvectionBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setAdvectionDiffusionConvectionBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, bool includeOuterCells=false) |
| Add AdvectionDiffusionConvection boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setAdvectionDiffusionTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the AdvectionDiffusionTemperatureBoundary on the superLattice domain This is an advection diffusion boundary -->MixinDynamics = AdvectionDiffusionRLBdynamics Moment-based boundary condition (see ref. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setAdvectionDiffusionTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattic, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the AdvectionDiffusionTemperatureBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setAdvectionDiffusionTemperatureBoundary (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF2D< T > &indicator) |
| Set AdvectionDiffusionTemperatureBoundary for indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setAdvectionDiffusionTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setAdvectionDiffusionTemperatureBoundary function on the superLattice domain This is an AdvectionDiffusionBoundary therefore mostly --> MixinDynamics = AdvectionDiffusionRLBdynamics. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setAdvectionDiffusionTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setAdvectionDiffusionTemperatureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setAdvectionDiffusionTemperatureBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator) |
| Set AdvectionDiffusionTemperatureBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBounceBackBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&indicator) |
| Set bounce back boundary on indicated cells of lattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBounceBackBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, DESCRIPTOR::d > &superGeometry, int material) |
| Set bounce back boundary on material cells of lattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBounceBackVelocityBoundary (SuperGeometry< T, 3 > &superGeometry, int material, T omega, SuperLattice< T, DESCRIPTOR > &sLattice) |
| Initialising the setLocalVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBounceBackVelocityBoundary (FunctorPtr< SuperIndicatorF3D< T > > &&indicator, T omega, SuperLattice< T, DESCRIPTOR > &sLattice) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBounceBackVelocityBoundary (BlockIndicatorF3D< T > &indicator, T omega, bool includeOuterCells, BlockLattice< T, DESCRIPTOR > &_block) |
| Set BounceBackVelocityBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBoundary (BlockLattice< T, DESCRIPTOR > &block, int iX, int iY, Dynamics< T, DESCRIPTOR > *dynamics, PostProcessorGenerator2D< T, DESCRIPTOR > *postProcessor) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBoundary (BlockLattice< T, DESCRIPTOR > &block, int iX, int iY, Dynamics< T, DESCRIPTOR > *dynamics) |
| template<typename T , typename DESCRIPTOR > | |
| void | addPoints2CommBC (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, int _overlap) |
| Adds needed Cells to the Communicator _commBC in SuperLattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBoundary (BlockLattice< T, DESCRIPTOR > &_block, int iX, int iY, int iZ, Dynamics< T, DESCRIPTOR > *dynamics, PostProcessorGenerator3D< T, DESCRIPTOR > *postProcessor) |
| sets boundary on indicated cells. This is a function, which can be used on many boundaries. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBoundary (BlockLattice< T, DESCRIPTOR > &_block, int iX, int iY, int iZ, Dynamics< T, DESCRIPTOR > *dynamics) |
| template<typename T , typename DESCRIPTOR > | |
| void | addPoints2CommBC (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, int _overlap) |
| Adds needed Cells to the Communicator _commBC in SuperLattice. | |
| template<typename T , typename DESCRIPTOR , typename OPERATOR = BouzidiPostProcessor> | |
| void | setBouzidiBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&boundaryIndicator, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&bulkIndicator, IndicatorF< T, DESCRIPTOR::d > &indicatorAnalyticalBoundary) |
| Set Bouzidi boundary on indicated cells of sLattice. | |
| template<typename T , typename DESCRIPTOR , typename OPERATOR = BouzidiPostProcessor> | |
| void | setBouzidiBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, DESCRIPTOR::d > &superGeometry, int materialOfSolidObstacle, IndicatorF< T, DESCRIPTOR::d > &indicatorAnalyticalBoundary, std::vector< int > bulkMaterials=std::vector< int >(1, 1)) |
| Set Bouzidi boundary on material cells of sLattice. | |
| template<typename T , typename DESCRIPTOR , typename OPERATOR = BouzidiPostProcessor> | |
| void | setBouzidiBoundary (BlockLattice< T, DESCRIPTOR > &block, BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockIndicatorF< T, DESCRIPTOR::d > &boundaryIndicator, BlockIndicatorF< T, DESCRIPTOR::d > &bulkIndicator, IndicatorF< T, DESCRIPTOR::d > &indicatorAnalyticalBoundary, bool verbose=false) |
| Set Bouzidi boundary on indicated cells of block lattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiVelocity (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, DESCRIPTOR::d > &superGeometry, int material, AnalyticalF< DESCRIPTOR::d, T, T > &u, std::vector< int > bulkMaterials=std::vector< int >(1, 1)) |
| Set Bouzidi velocity boundary on material cells of sLattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiVelocity (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&boundaryIndicator, AnalyticalF< DESCRIPTOR::d, T, T > &u, std::vector< int > bulkMaterials=std::vector< int >(1, 1)) |
| Set Bouzidi velocity boundary on indicated cells of sLattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiVelocity (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&boundaryIndicator, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&bulkIndicator, AnalyticalF< DESCRIPTOR::d, T, T > &u) |
| Set Bouzidi velocity boundary on indicated cells of sLattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiVelocity (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF< T, DESCRIPTOR::d > &boundaryIndicator, BlockIndicatorF< T, DESCRIPTOR::d > &bulkIndicator, AnalyticalF< DESCRIPTOR::d, T, T > &u, Cuboid< T, DESCRIPTOR::d > &cuboid) |
| Set Bouzidi velocity boundary on indicated cells of block lattice. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, DESCRIPTOR::d > &superGeometry, int material, T phi_d, std::vector< int > bulkMaterials=std::vector< int >(1, 1)) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, DESCRIPTOR::d > &superGeometry, int material, AnalyticalF< DESCRIPTOR::d, T, T > &phi_d, std::vector< int > bulkMaterials=std::vector< int >(1, 1)) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&boundaryIndicator, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&bulkIndicator, T phi_d) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&boundaryIndicator, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&bulkIndicator, AnalyticalF< DESCRIPTOR::d, T, T > &phi_d) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&boundaryIndicator, T phi_d, std::vector< int > bulkMaterials=std::vector< int >(1, 1)) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&boundaryIndicator, AnalyticalF< DESCRIPTOR::d, T, T > &phi_d, std::vector< int > bulkMaterials=std::vector< int >(1, 1)) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF< T, DESCRIPTOR::d > &boundaryIndicator, BlockIndicatorF< T, DESCRIPTOR::d > &bulkIndicator, T phi_d, Cuboid< T, DESCRIPTOR::d > &cuboid) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBouzidiAdeDirichlet (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF< T, DESCRIPTOR::d > &boundaryIndicator, BlockIndicatorF< T, DESCRIPTOR::d > &bulkIndicator, AnalyticalF< DESCRIPTOR::d, T, T > &phi_d, Cuboid< T, DESCRIPTOR::d > &cuboid) |
| template<typename T , typename DESCRIPTOR , typename FIELD_A , typename FIELD_B > | |
| void | setExtFieldBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the ExternalFieldBoundary on the superLattice domain This is an AdvectionDiffusionBoundary --> MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR> | |
| template<typename T , typename DESCRIPTOR , typename FIELD_A , typename FIELD_B > | |
| void | setExtFieldBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the ExternalFieldBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename FIELD_A , typename FIELD_B > | |
| void | setExtFieldBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator) |
| Set externalFieldBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T, DESCRIPTOR>> | |
| void | setFreeEnergyInletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material, std::string type, int latticeNumber) |
| Implementation of a inlet boundary condition for the partner lattices of the binary or ternary free energy model. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setFreeEnergyInletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, std::string type, int latticeNumber) |
| Initialising the Free Energy Inlet Boundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setFreeEnergyInletBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, std::string type, int latticeNumber, bool includeOuterCells=false) |
| Set FreeEnergyInlet boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setFreeEnergyInletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material, std::string type, int latticeNumber) |
| Initialising the FreeEnergyInletBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setFreeEnergyInletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, std::string type, int latticeNumber) |
| Initialising the FreeEnergyInletBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setFreeEnergyInletBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, std::string type, int latticeNumber, bool includeOuterCells=false) |
| Set FreeEnergyInletBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setFreeEnergyOutletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material, std::string type, int latticeNumber) |
| Implementation of a outlet boundary condition for the partner lattices of the binary or ternary free energy model. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setFreeEnergyOutletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, std::string type, int latticeNumber) |
| Implementation of a outlet boundary condition for the partner lattices of the binary or ternary free energy model. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setFreeEnergyOutletBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, std::string type, int latticeNumber, bool includeOuterCells=false) |
| Set FreeEnergyOutlet boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setFreeEnergyOutletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material, std::string type, int latticeNumber) |
| Implementation of a outlet boundary condition for the partner lattices of the binary or the ternary free energy model. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setFreeEnergyOutletBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, std::string type, int latticeNumber) |
| Implementation of a outlet boundary condition for the partner lattices of the binary or the ternary free energy model. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setFreeEnergyOutletBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, T omega, std::string type, int latticeNumber, bool includeOuterCells=false) |
| Set FreeEnergyOutletBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 2 > &superGeometry, int material, T alpha, T kappa1, T kappa2, T h1, T h2, int latticeNumber) |
| Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, T alpha, T kappa1, T kappa2, T h1, T h2, int latticeNumber) |
| Initialising the Free Energy Wall Boundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 2 > &superGeometry, int material, T alpha, T kappa1, T kappa2, T kappa3, T h1, T h2, T h3, int latticeNumber) |
| Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, T alpha, T kappa1, T kappa2, T kappa3, T h1, T h2, T h3, int latticeNumber) |
| Initialising the Free Energy Wall Boundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF2D< T > &indicator, T addend, int latticeNumber, bool includeOuterCells=false) |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material, T alpha, T kappa1, T kappa2, T h1, T h2, int latticeNumber) |
| Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, T alpha, T kappa1, T kappa2, T h1, T h2, int latticeNumber) |
| Initialising the Free Energy Wall Boundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material, T alpha, T kappa1, T kappa2, T kappa3, T h1, T h2, T h3, int latticeNumber) |
| Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, T alpha, T kappa1, T kappa2, T kappa3, T h1, T h2, T h3, int latticeNumber) |
| Initialising the Free Energy Wall Boundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setFreeEnergyWallBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, T addend, int latticeNumber, bool includeOuterCells=false) |
| template<typename T , typename DESCRIPTOR > | |
| void | setInterpolatedConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material, T *uAv) |
| Initialising the InterpolatedConvectionBoundary on the superLattice domain This is an interpolated boundary --> MixinDynamics = BGKdynamics Usually T* uAv = NULL;. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setInterpolatedConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, T *uAv) |
| Initialising the InterpolatedConvectionBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setInterpolatedConvectionBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, T *uAv, bool includeOuterCells=false) |
| Set InterpolatedConvectionBoundary for indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setInterpolatedConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material, T *uAv=NULL) |
| Initialising the setInterpolatedConvectionBoundary function on the superLattice domain This is an Interpolated Boundary --> MixinDynamics = BGKdynamics. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setInterpolatedConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, T *uAv) |
| Initialising the setInterpolatedConvectionBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setInterpolatedConvectionBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, T *uAv, bool includeOuterCells=false) |
| Add Interpolatedconvection boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setInterpolatedPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setInterpolatedPressureBoundary function on the superLattice domain Interpolated Boundaries use the BGKdynamics collision-operator. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setInterpolatedPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setInterpolatedPressureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setInterpolatedPressureBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Add interpolated pressure boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setInterpolatedPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setInterpolatedPressureBoundary function on the superLattice domain Interpolated Boundaries use usually the BGKdynamics collision-operator --> MixinDynamics = BGKdynamics<T,DESCRIPTOR> | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setInterpolatedPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setInterpolatedPressureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setInterpolatedPressureBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| Add interpolated pressure boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setInterpolatedVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setInterpolatedVelocityBoundary function on the superLattice domain Interpolated Boundaries mostly use the BGKdynamics collision-operator --> MixinDynamics = BGKdynamics<T,DESCRIPTOR> | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setInterpolatedVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setInterpolatedVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setInterpolatedVelocityBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set interpolatedVelocityBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setInterpolatedVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setInterpolatedVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setInterpolatedVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setInterpolatedVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setInterpolatedVelocityBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| template<typename T , typename DESCRIPTOR > | |
| void | setLocalConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material, T *uAv=NULL) |
| Initialising the LocalConvectionBoundary on the superLattice domain This is a local boundary --> MixinDynamics = RLBdynamics. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setLocalConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, T *uAv) |
| Initialising the LocalConvectionBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setLocalConvectionBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, T *uAv, bool includeOuterCells=false) |
| Set LocalConvectionBoundary for indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setLocalConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material, T *uAv=NULL) |
| Initialising the setLocalConvectionBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setLocalConvectionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, T *uAv) |
| Initialising the setLocalConvectionBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setLocalConvectionBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, T *uAv, bool includeOuterCells=false) |
| Add local convection boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setLocalPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setLocalPressureBoundary function on the superLattice domain Local Boundaries use the RLBdynamics collision operator. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setLocalPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setLocalPressureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setLocalPressureBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set pressure boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setLocalPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setLocalPressureBoundary function on the superLattice domain Local Boundaries use the RLBdynamics collision operator. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setLocalPressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setLocalPressureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setLocalPressureBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| Set pressure boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setLocalVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setLocalVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setLocalVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setLocalVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setLocalVelocityBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set local velocity boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setLocalVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setLocalVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = RLBdynamics<T,DESCRIPTOR>> | |
| void | setLocalVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setLocalVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setLocalVelocityBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| Set local velocity boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setNewSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| template<typename T , typename DESCRIPTOR > | |
| void | setNewSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| template<typename T , typename DESCRIPTOR > | |
| void | setNewSlipBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| template<typename T , typename DESCRIPTOR > | |
| void | setPartialSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T tuner, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the Partial slip boundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setPartialSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T tuner, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the Partial slip boundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setPartialSlipBoundary (BlockLattice< T, DESCRIPTOR > &block, T tuner, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set Partial Slip boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setPartialSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T tuner, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the PartialSlipBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setPartialSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T tuner, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the PartialSlipBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setPartialSlipBoundary (BlockLattice< T, DESCRIPTOR > &block, T tuner, BlockIndicatorF3D< T > &indicator, bool includeOuterCells=false) |
| Set Partial Slip Boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setRegularizedHeatFluxBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material, T *heatFlux=nullptr) |
| Initialising the RegularizedHeatFluxBoundary on the superLattice domain This is an advection diffusion boundary -->MixinDynamics = AdvectionDiffusionRLBdynamics. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setRegularizedHeatFluxBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator, T *heatFlux=nullptr) |
| Initialising the RegularizedHeatFluxBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setRegularizedHeatFluxBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, T *heatFlux) |
| Set RegularizedHeatFluxBoundary for indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setRegularizedTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the RegularizedTemperatureBoundary on the superLattice domain This is an advection diffusion boundary -->MixinDynamics = AdvectionDiffusionRLBdynamics. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setRegularizedTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the RegularizedTemperatureBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setRegularizedTemperatureBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator) |
| Set RegularizedTemperatureBoundary for indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setRobinBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setRobinBoundary function on the superLattice domain This is an AdvectionDiffusionBoundary therefore mostly --> MixinDynamics = AdvectionDiffusionRLBdynamics. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setRobinBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setRobinBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setRobinBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, T omega, bool includeOuterCells=false, bool useOtherStrategy=false) |
| Set RobinBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDiffuseConstTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setRtlbmDiffuseConstTemperatureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDiffuseConstTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setRtlbmDiffuseConstTemperatureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDiffuseConstTemperatureBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, T omega, bool includeOuterCells=false) |
| Set RtlbmDiffuseConstTemperatureBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDiffuseTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setRtlbmDiffuseTemperatureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDiffuseTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setRtlbmDiffuseTemperatureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDiffuseTemperatureBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, T omega, bool includeOuterCells=false) |
| Set RtlbmDiffuseTemperatureBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDirectedTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setRtlbmDirectedTemperatureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDirectedTemperatureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setRtlbmDirectedTemperatureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setRtlbmDirectedTemperatureBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, T omega, bool includeOuterCells=false) |
| Set RtlbmDirectedTemperatureBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the SlipBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the SlipBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setSlipBoundary (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| set slipBoundary for any indicated cells inside the block domain | |
| template<typename T , typename DESCRIPTOR > | |
| void | setSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setslipBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setSlipBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setslipBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setSlipBoundary (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF3D< T > &indicator, bool includeOuterCells=false) |
| Set slipBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setSlipBoundaryWithDynamics (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setSlipBoundaryWithDynamics function on the superLattice domain Interpolated Boundaries use the BGKdynamics collision-operator. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setSlipBoundaryWithDynamics (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setSlipBoundaryWithDynamics function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setSlipBoundaryWithDynamics (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set interpolated velocity boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setSlipBoundaryWithDynamics (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setSlipBoundaryWithDynamics function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setSlipBoundaryWithDynamics (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setSlipBoundaryWithDynamics function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setSlipBoundaryWithDynamics (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| template<typename T , typename DESCRIPTOR > | |
| void | setWallFunctionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material, UnitConverter< T, DESCRIPTOR > const &converter, wallFunctionParam< T > const &wallFunctionParam, IndicatorF3D< T > *geoIndicator=NULL) |
| Initialising the WallFunctionBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setWallFunctionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator, UnitConverter< T, DESCRIPTOR > const &converter, wallFunctionParam< T > const &wallFunctionParam, IndicatorF3D< T > *geoIndicator) |
| Initialising the WallFunctionBoundary on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setWallFunctionBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, UnitConverter< T, DESCRIPTOR > const &converter, wallFunctionParam< T > const &wallFunctionParam, IndicatorF3D< T > *geoIndicator, bool includeOuterCells=false) |
| Set WallFunction boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setZeroDistributionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| template<typename T , typename DESCRIPTOR > | |
| void | setZeroDistributionBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| template<typename T , typename DESCRIPTOR > | |
| void | setZeroDistributionBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator) |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setZeroGradientBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setZeroGradientBoundary function on the superLattice domain This is an AdvectionDiffusionBoundary therefore mostly --> MixinDynamics = AdvectionDiffusionRLBdynamics. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>> | |
| void | setZeroGradientBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setZeroGradientBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setZeroGradientBoundary (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator) |
| Set ZeroGradientBoundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHePressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setZouHePressureBoundary function on the superLattice domain ZouHe Boundaries use the BGKdynamics collision operator. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setZouHePressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setZouHePressureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setZouHePressureBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set pressure boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHePressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setZouHePressureBoundary function on the superLattice domain ZouHe Boundaries use the BGKdynamics collision operator. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHePressureBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setZouHePressureBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics > | |
| void | setZouHePressureBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| Set pressure boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHeVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setZouHeVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHeVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setZouHeVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , class MixinDynamics > | |
| void | setZouHeVelocityBoundary (BlockLattice< T, DESCRIPTOR > &block, T omega, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set ZouHe velocity boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHeVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setZouHeVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHeVelocityBoundary (SuperLattice< T, DESCRIPTOR > &sLattice, T omega, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setZouHeVelocityBoundary function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MixinDynamics = BGKdynamics<T,DESCRIPTOR>> | |
| void | setZouHeVelocityBoundary (BlockLattice< T, DESCRIPTOR > &_block, T omega, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| Set ZouHe velocity boundary for any indicated cells inside the block domain. | |
| template<typename T > | |
| LoadBalancer< T > * | createLoadBalancer (XMLreader const &xmlReader, CuboidGeometry3D< T > *cGeo=NULL) |
| Creator Function for LoadBalancer from XMLreader. | |
| template<typename T > | |
| LoadBalancer< T > * | createLoadBalancer (std::string const &fileName, CuboidGeometry3D< T > *cGeo=NULL) |
| Creator Function for LoadBalancer from fileName. | |
| template<typename SUPER > | |
| SuperCommunicator (SUPER &) -> SuperCommunicator< typename SUPER::value_t, SUPER > | |
| template<typename DYNAMICS > | |
| DynamicsPromise (meta::id< DYNAMICS >) -> DynamicsPromise< typename DYNAMICS::value_t, typename DYNAMICS::descriptor_t > | |
| template<typename T > | |
| bool | getRangeBlockGeometrySmoothIndicatorIntersection2D (BlockGeometryStructure2D< T > &blockGeometry, SmoothIndicatorF2D< T, T, true > &sIndicator, T invDeltaX, std::vector< int > &start, std::vector< int > &end) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBlockExternalParticleField (BlockGeometryStructure2D< T > &blockGeometry, AnalyticalF< 2, T, T > &velocity, SmoothIndicatorF2D< T, T, true > &sIndicator, BlockLattice2D< T, DESCRIPTOR > &extendedBlockLattice) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBlockExternalParticleField (BlockGeometryStructure2D< T > &blockGeometry, AnalyticalF< 2, T, T > &velocity, SmoothIndicatorF2D< T, T, true > &sIndicator, BlockLattice2D< T, DESCRIPTOR > &extendedBlockLattice, Vector< T, 2 > cellMin, Vector< T, 2 > cellMax, Vector< bool, 2 > periodic) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBlockZetaParticleField (BlockGeometryStructure2D< T > &blockGeometry, AnalyticalF< 2, T, T > &velocity, SmoothIndicatorF2D< T, T, true > &sIndicator, BlockLattice2D< T, DESCRIPTOR > &extendedBlockLattice) |
| template<typename T > | |
| bool | getRangeBlockGeometrySmoothIndicatorIntersection3D (BlockGeometryStructure3D< T > &blockGeometry, SmoothIndicatorF3D< T, T, true > &sIndicator, T invDeltaX, std::vector< int > &start, std::vector< int > &end) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBlockExternalParticleField (BlockGeometryStructure3D< T > &blockGeometry, AnalyticalF< 3, T, T > &velocity, SmoothIndicatorF3D< T, T, true > &sIndicator, BlockLattice3D< T, DESCRIPTOR > &extendedBlockLattice) |
| template<typename T , typename DESCRIPTOR > | |
| void | setBlockExternalParticleField (BlockGeometryStructure3D< T > &blockGeometry, AnalyticalF< 3, T, T > &velocity, SmoothIndicatorF3D< T, T, true > &sIndicator, BlockLattice3D< T, DESCRIPTOR > &extendedBlockLattice, Vector< T, 3 > cellMin, Vector< T, 3 > cellMax, Vector< bool, 3 > periodic) |
| template<typename PP > | |
| PostProcessorPromise (meta::id< PP >) -> PostProcessorPromise< typename PP::value_t, typename PP::descriptor_t > | |
| template<typename T , typename DESCRIPTOR , typename DESCRIPTOR_AD > | |
| UnitConverter< T, DESCRIPTOR > | createADfractionalUnitConverter (const UnitConverter< T, DESCRIPTOR > &converter, int fraction, T targetLatticeRelaxationTime) |
| template<typename T , typename DESCRIPTOR > | |
| UnitConverter< T, DESCRIPTOR > | createFractionalUnitConverter (const UnitConverter< T, DESCRIPTOR > &converter, int fraction, T targetLatticeRelaxationTime) |
| template<typename T , typename DESCRIPTOR > | |
| T | residualPhysDiffusivity (const UnitConverter< T, DESCRIPTOR > &converterFractional, T physDiffusivity) |
| void | olbInit (int *argc, char ***argv, bool multiOutput, bool verbose) |
| template<> | |
| void | checkPlatform< Platform::GPU_CUDA > () |
| Verifies availability of CUDA device and MPI support. | |
| template<> | |
| void | checkPlatform< Platform::GPU_CUDA > () |
| Verifies availability of CUDA device and MPI support. | |
| template<Platform PLATFORM> | |
| void | checkPlatform () |
| Verifies requirements for using PLATFORM. | |
| template<typename CONCRETIZABLE , typename F > | |
| auto | callUsingConcretePlatform (Platform platform, typename CONCRETIZABLE::base_t *ptr, F f) |
| Dispatcher for concrete platform access. | |
| template<typename F > | |
| void | callUsingConcretePlatform (Platform platform, F f) |
| template<typename CONCRETIZABLE , typename... ARGS> | |
| CONCRETIZABLE::base_t * | constructUsingConcretePlatform (Platform platform, ARGS &&... args) |
| constexpr bool | isPlatformCPU (Platform platform) |
| Returns true if platform is equal to Platform::CPU_*. | |
| template<typename T , typename DESCRIPTOR > | |
| PowerLawUnitConverter< T, DESCRIPTOR > * | createPowerLawUnitConverter (XMLreader const ¶ms) |
| double | getThetaRefracted (double const &thetaIncident, double const &refractiveRelative) |
| Documentation of implemented functions found in 5.2.2 Biomedical Optics, Principles and Imaging; Wang 2007. | |
| double | getFresnelFunction (double const &theta, double const &refractiveRelative) |
| double | R_phi_diff (double const &theta, double const &refractiveRelative) |
| double | R_j_diff (double const &theta, double const &refractiveRelative) |
| double | getRefractionFunction (const double &refractiveRelative) |
| double | getPartialBBCoefficient (double const &latticeDiffusionCoefficient, double const &relativeRefractiveIndex) |
| template<typename T , typename DESCRIPTOR > | |
| double | getPartialBBCoefficient (RadiativeUnitConverter< T, DESCRIPTOR > const &converter) |
| template<typename T , typename DESCRIPTOR > | |
| double | getRefractionFunction (RadiativeUnitConverter< T, DESCRIPTOR > const &converter) |
| template<typename T , unsigned D, typename IMPL > | |
| constexpr T | norm_squared (const ScalarVector< T, D, IMPL > &a) |
| Squared euclidean vector norm. | |
| template<typename T , unsigned D, typename IMPL > | |
| constexpr T | norm (const ScalarVector< T, D, IMPL > &a) |
| Euclidean vector norm. | |
| template<typename T , unsigned D, typename IMPL > | |
| bool | closeToZero (const ScalarVector< T, D, IMPL > &a) |
| Returns true iff all components are within floating point error distance of 0. | |
| template<typename T , unsigned D, typename IMPL > | |
| constexpr std::vector< T > | toStdVector (const ScalarVector< T, D, IMPL > &a) |
| Copies data into a standard vector. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | operator< (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if all lhs components are smaller than rhs. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | operator> (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if all lhs components are greater than rhs. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | operator<= (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if all lhs components are smaller or equal than rhs. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | operator>= (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if all lhs components are smaller or equal than rhs. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | lex_smaller (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if lhs is lexicographically smaller than rhs. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | lex_greater (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if lhs is lexicographically greater than rhs. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | lex_smaller_eq (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if lhs is lexicographically smaller or equal to rhs. | |
| template<typename T , unsigned D, typename U , typename IMPL , typename IMPL_ > | |
| constexpr bool | lex_greater_eq (const ScalarVector< T, D, IMPL > &lhs, const ScalarVector< U, D, IMPL_ > &rhs) |
| Returns true if lhs is lexicographically greater or equal to rhs. | |
| template<typename T , unsigned D, typename IMPL > | |
| std::ostream & | operator<< (std::ostream &os, const ScalarVector< T, D, IMPL > &o) |
| Print vector entries to ostream in a human-readable fashion. | |
| template<typename T , typename DESCRIPTOR > | |
| void | setSuperExternalPSMParticleField (SuperGeometry< T, 2 > &sGeometry, int material, AnalyticalF2D< T, T > &velocity, T size, SuperLatticeF2D< T, DESCRIPTOR > &epsilon, SuperLattice< T, DESCRIPTOR > &sLattice) |
| template<typename COUPLER , typename... MAP> | |
| SuperLatticeCoupling (COUPLER, MAP &&...) -> SuperLatticeCoupling< COUPLER, typename meta::map< MAP... >::template map_values< descriptors::extract_valued_descriptor_t > > | |
| template<typename COUPLER , typename... MAP> | |
| auto | constructSharedCoupling (COUPLER, MAP &&... map) |
| template<typename T , typename DESCRIPTOR > | |
| UnitConverter< T, DESCRIPTOR > * | createUnitConverter (XMLreader const ¶ms) |
| creator function with data given by a XML file | |
| template<typename T > | |
| std::enable_if_t< std::is_arithmetic< T >::type::value, T > | abs (T x) |
| template<typename T , typename IMPL , typename IMPL_ > | |
| constexpr T | crossProduct2D (const ScalarVector< T, 2, IMPL > &a, const ScalarVector< T, 2, IMPL_ > &b) |
| template<typename T , typename IMPL , typename IMPL_ > | |
| constexpr Vector< T, 3 > | crossProduct3D (const ScalarVector< T, 3, IMPL > &a, const ScalarVector< T, 3, IMPL_ > &b) any_platform |
| template<typename T , unsigned D, typename IMPL , typename IMPL_ > | |
| auto | crossProduct (const ScalarVector< T, D, IMPL > &a, const ScalarVector< T, D, IMPL_ > &b) |
| template<typename T , unsigned D, typename IMPL > | |
| constexpr Vector< T, D > | normalize (const ScalarVector< T, D, IMPL > &a, T scale=T{1}) |
| template<typename T , unsigned D, typename IMPL > | |
| constexpr Vector< T, D > | abs (const ScalarVector< T, D, IMPL > &a) |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, Vector< T, D > > | operator+ (U a, const ScalarVector< T, D, IMPL > &b) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, Vector< T, D > > | operator+ (const ScalarVector< T, D, IMPL > &a, U b) any_platform |
| template<typename T , unsigned D, typename IMPL , typename IMPL_ > | |
| constexpr Vector< T, D > | operator+ (const ScalarVector< T, D, IMPL > &a, const ScalarVector< T, D, IMPL_ > &b) any_platform |
| template<typename T , typename W , unsigned D, typename IMPL , typename IMPL_ > | |
| constexpr Vector< decltype(T{}+W{}), D > | operator+ (const ScalarVector< T, D, IMPL > &a, const ScalarVector< W, D, IMPL_ > &b) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, Vector< T, D > > | operator- (U a, const ScalarVector< T, D, IMPL > &b) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, Vector< T, D > > | operator- (const ScalarVector< T, D, IMPL > &a, U b) any_platform |
| template<typename T , unsigned D, typename IMPL , typename IMPL_ > | |
| constexpr Vector< T, D > | operator- (const ScalarVector< T, D, IMPL > &a, const ScalarVector< T, D, IMPL_ > &b) any_platform |
| template<typename T , typename W , unsigned D, typename IMPL , typename IMPL_ > | |
| constexpr Vector< decltype(T{}-W{}), D > | operator- (const ScalarVector< T, D, IMPL > &a, const ScalarVector< W, D, IMPL_ > &b) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, Vector< decltype(T{} *U{}), D > > | operator* (U a, const ScalarVector< T, D, IMPL > &b) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, Vector< decltype(T{} *U{}), D > > | operator* (const ScalarVector< T, D, IMPL > &a, U b) any_platform |
| template<typename T , typename U , unsigned D, typename IMPL , typename IMPL_ > | |
| constexpr auto | operator* (const ScalarVector< T, D, IMPL > &a, const ScalarVector< U, D, IMPL_ > &b) any_platform |
| Inner product. | |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, Vector< T, D > > | operator/ (const ScalarVector< T, D, IMPL > &a, U b) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, bool > | operator< (U lhs, const ScalarVector< T, D, IMPL > &rhs) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, bool > | operator> (const ScalarVector< T, D, IMPL > &lhs, U rhs) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, bool > | operator<= (U lhs, const ScalarVector< T, D, IMPL > &rhs) any_platform |
| template<typename T , unsigned D, typename U , typename IMPL > | |
| constexpr meta::enable_if_arithmetic_t< U, bool > | operator>= (const ScalarVector< T, D, IMPL > &lhs, U rhs) any_platform |
| template<typename T , unsigned D, typename IMPL , typename IMPL_ > | |
| constexpr Vector< T, D > | minv (const ScalarVector< T, D, IMPL > &v, const ScalarVector< T, D, IMPL_ > &w) |
| template<typename T , unsigned D, typename IMPL , typename IMPL_ > | |
| constexpr Vector< T, D > | maxv (const ScalarVector< T, D, IMPL > &v, const ScalarVector< T, D, IMPL_ > &w) |
| any_platform FreeSurface::Flags | operator& (FreeSurface::Flags lhs, FreeSurface::Flags rhs) |
| any_platform FreeSurface::Flags | operator| (FreeSurface::Flags lhs, FreeSurface::Flags rhs) |
| template<unsigned D, typename T , typename S , typename G > | |
| AnalyticalConcatenation (AnalyticalF< D, T, S > &, G g, unsigned _=1) -> AnalyticalConcatenation< D, std::remove_pointer_t< decltype(g(std::conditional_t< std::is_invocable_v< G, T >, T, T * >{}))>, T, S, std::is_invocable_v< G, T >, std::is_pointer_v< decltype(g(std::conditional_t< std::is_invocable_v< G, T >, T, T * >{}))> > | |
| template<unsigned D, typename T , typename S , typename U = T> | |
| AnalyticalConcatenation (AnalyticalF< D, T, S > &, U(*g)(T)) -> AnalyticalConcatenation< D, U, T, S, true, false > | |
| template<unsigned D, typename wrapped_U , typename T , typename S > | |
| AnalyticalConcatenation (AnalyticalF< D, T, S > &, wrapped_U(T *), unsigned) -> AnalyticalConcatenation< D, std::remove_pointer_t< wrapped_U >, T, S, false, std::is_pointer_v< wrapped_U > > | |
| template<unsigned D, typename wrapped_U , typename T , typename S > | |
| AnalyticalConcatenation (AnalyticalF< D, T, S > &, wrapped_U(const T *), unsigned) -> AnalyticalConcatenation< D, std::remove_pointer_t< wrapped_U >, T, S, false, std::is_pointer_v< wrapped_U > > | |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator+ (std::shared_ptr< AnalyticalF< D, T, S > > lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator+ (std::shared_ptr< AnalyticalF< D, T, S > > lhs, T rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator+ (T lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator- (std::shared_ptr< AnalyticalF< D, T, S > > lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator- (std::shared_ptr< AnalyticalF< D, T, S > > lhs, T rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator- (T lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator* (std::shared_ptr< AnalyticalF< D, T, S > > lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator* (std::shared_ptr< AnalyticalF< D, T, S > > lhs, T rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator* (T lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator/ (std::shared_ptr< AnalyticalF< D, T, S > > lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator/ (std::shared_ptr< AnalyticalF< D, T, S > > lhs, T rhs) |
| template<unsigned D, typename T , typename S > | |
| std::shared_ptr< AnalyticalF< D, T, S > > | operator/ (T lhs, std::shared_ptr< AnalyticalF< D, T, S > > rhs) |
| template<class F > | |
| AnalyticalDerivativeAD (const F &) -> AnalyticalDerivativeAD< F, typename F::targetType, typename F::sourceType, F::dim > | |
| template<typename S > | |
| IndicatorCuboid2D< S > * | createIndicatorCuboid2D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| IndicatorCircle2D< S > * | createIndicatorCircle2D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| IndicatorTriangle2D< S > * | createIndicatorTriangle2D (XMLreader const ¶ms, bool verbose) |
| template<typename S > | |
| IndicatorEquiTriangle2D< S > * | createIndicatorEquiTriangle2D (XMLreader const ¶ms, bool verbose) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorCircle3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorSphere3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorCylinder3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorCone3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorCuboid3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorUnion3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorWithout3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorIntersection3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S > | |
| std::shared_ptr< IndicatorF3D< S > > | createIndicatorF3D (XMLreader const ¶ms, bool verbose=false) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorF2D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF2D< S > > | operator+ (std::shared_ptr< F1< S > > lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorF2D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF2D< S > > | operator- (std::shared_ptr< F1< S > > lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorF2D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF2D< S > > | operator* (std::shared_ptr< F1< S > > lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorIdentity2D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF2D< S > > | operator+ (F1< S > &lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorIdentity2D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF2D< S > > | operator- (F1< S > &lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorIdentity2D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF2D< S > > | operator* (F1< S > &lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorF3D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF3D< S > > | operator+ (std::shared_ptr< F1< S > > lhs, std::shared_ptr< F2< S > > rhs) |
| Free function implements lhs+rhs, only for IndicaotrsF3D types through enable_if and is_base_of. | |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorF3D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF3D< S > > | operator- (std::shared_ptr< F1< S > > lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorF3D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF3D< S > > | operator* (std::shared_ptr< F1< S > > lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorIdentity3D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF3D< S > > | operator+ (F1< S > &lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorIdentity3D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF3D< S > > | operator- (F1< S > &lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename S , template< typename U > class F1, template< typename V > class F2, typename = typename std::enable_if<std::is_base_of<IndicatorIdentity3D<S>, F1<S>>::value>::type> | |
| std::shared_ptr< IndicatorF3D< S > > | operator* (F1< S > &lhs, std::shared_ptr< F2< S > > rhs) |
| template<typename T , typename DESCRIPTOR > | |
| SuperLatticeDiscreteNormal2D (SuperLattice< T, DESCRIPTOR > &, SuperGeometry< typename SuperLattice< T, DESCRIPTOR >::value_t, 2 > &, FunctorPtr< SuperIndicatorF2D< typename SuperLattice< T, DESCRIPTOR >::value_t > > &&) -> SuperLatticeDiscreteNormal2D< T, DESCRIPTOR > | |
| template<typename T , typename DESCRIPTOR > | |
| SuperLatticeDiscreteNormalType2D (SuperLattice< T, DESCRIPTOR > &, SuperGeometry< typename SuperLattice< T, DESCRIPTOR >::value_t, 2 > &, FunctorPtr< SuperIndicatorF2D< typename SuperLattice< T, DESCRIPTOR >::value_t > > &&) -> SuperLatticeDiscreteNormalType2D< T, DESCRIPTOR > | |
| template<typename T , typename DESCRIPTOR > | |
| SuperLatticePhysPressure2D (SuperLattice< T, DESCRIPTOR > &, const UnitConverter< T, DESCRIPTOR > &) -> SuperLatticePhysPressure2D< T, DESCRIPTOR > | |
| template<typename T , typename DESCRIPTOR > | |
| SuperLatticePhysPressure3D (SuperLattice< T, DESCRIPTOR > &, const UnitConverter< T, DESCRIPTOR > &) -> SuperLatticePhysPressure3D< T, DESCRIPTOR > | |
| template<typename T , typename DESCRIPTOR > | |
| SuperLatticePhysVelocity2D (SuperLattice< T, DESCRIPTOR > &, const UnitConverter< T, DESCRIPTOR > &) -> SuperLatticePhysVelocity2D< T, DESCRIPTOR > | |
| template<typename T , typename DESCRIPTOR > | |
| SuperLatticePhysVelocity3D (SuperLattice< T, DESCRIPTOR > &, const UnitConverter< T, DESCRIPTOR > &, bool) -> SuperLatticePhysVelocity3D< T, DESCRIPTOR > | |
| template<typename T > | |
| void | evaluateCuboidGeometryNeighbourhood (CuboidGeometry2D< T > &cuboidGeometry, std::map< int, std::vector< int > > &neighbourhood, int offset=0) |
| Evaluate complete neighbourhood and store in std::map. | |
| template<typename S > | |
| std::vector< S > | getDataFromTag (XMLreader const &reader, std::string attrName, int nData) |
| Helper Function to retrieve nData-dimensional std::vector of type S from space separated tag. | |
| template<typename T > | |
| CuboidGeometry3D< T > * | createCuboidGeometry (std::string fileName) |
| Load CuboidGeometry from XML File. | |
| template<typename T > | |
| void | evaluateCuboidGeometryNeighbourhood (CuboidGeometry3D< T > &cuboidGeometry, std::map< int, std::vector< int > > &neighbourhood, int offset=0) |
| Evaluate complete neighbourhood and store in std::map. | |
| bool | checkCuboidNeighbourhoodConsistency (std::map< int, std::vector< int > > &neighbourhood, bool correct=false, bool verbose=false) |
| Consistency check for neighbour retrieval. | |
| template<typename T > | |
| void | continueMinimizeByVolume (CuboidGeometry3D< T > &cGeometry, IndicatorF3D< T > &indicatorF, int nC) |
| Splits largest cuboid by-volume until there are nC cuboids. | |
| template<typename T > | |
| void | minimizeByVolume (CuboidGeometry3D< T > &cGeometry, IndicatorF3D< T > &indicatorF, int nC) |
| Splits into nC cuboids by-volume. | |
| template<typename T > | |
| void | minimizeByWeight (CuboidGeometry3D< T > &cGeometry, IndicatorF3D< T > &indicatorF, int nC) |
| template<> | |
| std::string | CLIreader::getValueOrFallback< std::string > (const std::string &name, std::string fallback) const |
| std::string | createFileName (std::string name) |
| for .pvd masterFile | |
| std::string | createFileName (std::string name, int iT) |
| used for .pvd file per timeStep iT | |
| std::string | createParallelFileName (std::string name, bool withSize=true) |
| for parallel io, e.g. adds "_rank0000001" for rank=1, and optional "_size0000016" if withSize==true | |
| std::string | createFileName (std::string name, int iT, int iC) |
| every thread writes his cuboids iC per timeStep iT | |
| std::string | createFileName (std::string name, std::string functor, int iT=0) |
| to write functors instantaneously, without adding | |
| std::string | createFileName (std::string name, std::string functor, int iT, int iC) |
| to write functors instantaneously, without adding | |
| template<class Ch , class Tr > | |
| auto & | operator<< (std::basic_ostream< Ch, Tr > &os, FileName &fileName) |
| template<typename ARRAYTYPE > | |
| void | writeScalarData (std::ofstream &dataWriterOpened, std::string fullFileName, std::string headLine, ARRAYTYPE &dataVector, int iE, int iE0=0) |
| Write functions for scalar and array data. | |
| template<typename ARRAYTYPE > | |
| void | writeScalarData (std::string fullFileName, std::string headLine, ARRAYTYPE &dataVector, int iE, int iE0=0) |
| Write scalar data. | |
| template<typename ARRAYTYPE > | |
| void | writeScalarData (std::string fullFileName, std::vector< std::string > &headLineVector, ARRAYTYPE &dataVector, int iT, int iTinit=0) |
| Write scalar data (including sanity check) | |
| void | writeArrayData (std::string fullFileName, std::string headLine, std::vector< std::string > &dataVector) |
| Write array data. | |
| template<typename ARRAYTYPE > | |
| void | writeArrayData (std::string fullFileName, std::string headLine, std::vector< ARRAYTYPE > &dataVector) |
| Write array data. | |
| template<typename ARRAYTYPE > | |
| void | writeArrayData (std::string fullFileName, std::vector< std::string > &headLineVector, std::vector< ARRAYTYPE > &dataVector) |
| Write array data (including sanity check) | |
| template<class Ch , class Tr , std::size_t... Is> | |
| void | print_index_sequence (std::basic_ostream< Ch, Tr > &os, const std::index_sequence< Is... > is) |
| Print std::index_sequence. | |
| template<class Ch , class Tr , std::size_t... Is> | |
| auto & | operator<< (std::basic_ostream< Ch, Tr > &os, const std::index_sequence< Is... > &is) |
| Operator << for std::index_sequence. | |
| template<class Ch , class Tr , typename... args> | |
| auto & | operator<< (std::basic_ostream< Ch, Tr > &os, std::vector< args... > &vec) |
| Operator << for std::vector. | |
| template<class Ch , class Tr , class T , std::size_t N> | |
| auto & | operator<< (std::basic_ostream< Ch, Tr > &os, std::array< T, N > &array) |
| Operator << for std::array. | |
| template<class Ch , class Tr , typename... args> | |
| auto & | operator<< (std::basic_ostream< Ch, Tr > &os, std::list< args... > &list) |
| Operator << for std::list. | |
| template<class Ch , class Tr , typename... args> | |
| auto & | operator<< (std::basic_ostream< Ch, Tr > &os, std::set< args... > &set) |
| Operator << for std::set. | |
| template<class Ch , class Tr , typename... args> | |
| auto & | operator<< (std::basic_ostream< Ch, Tr > &os, std::unordered_set< args... > &set) |
| Operator << for std::unordered_set. | |
| template<typename O > | |
| std::string | boolToStr (O input) |
| Create readable bool string. | |
| void | serializer2ostr (Serializer &serializer, std::ostream &ostr, bool enforceUint=false) |
| processes data from a serializer to a given ostr, always in parallel | |
| void | istr2serializer (Serializer &serializer, std::istream &istr, bool enforceUint=false) |
| processes an istr to a serializer, always in parallel | |
| void | serializer2buffer (Serializer &serializer, std::uint8_t *buffer) |
| processes data from a serializer to a given buffer | |
| void | buffer2serializer (Serializer &serializer, const std::uint8_t *buffer) |
| processes a buffer to a serializer | |
| template<> | |
| bool | XMLreader::read< std::size_t > (std::size_t &value, bool verboseOn, bool exitIfMissing) const |
| template<> | |
| bool | XMLreader::read< std::string > (std::string &entry, bool verboseOn, bool exitIfMissing) const |
| template<typename T , unsigned D> | |
| std::unordered_set< int > | getLatticeMaterials (const std::vector< SolidBoundary< T, D > > &solidBoundaries) |
| Get material numbers of multiple solid boundaries in std::vector. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename SCHEME_BOUND , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdBoundary2D (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 2 > &superGeometry, int material) |
| Initialising the setFdBoundary2D function on the superLattice domain Interpolated Boundaries use the BGKdynamics collision-operator. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename SCHEME_BOUND , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdBoundary2D (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF2D< T > > &&indicator) |
| Initialising the setFdBoundary2D function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename SCHEME_BOUND , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdBoundary2D (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF2D< T > &indicator, bool includeOuterCells=false) |
| Set interpolated velocity boundary for any indicated cells inside the block domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename SCHEME_BOUND , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdBoundary3D (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, 3 > &superGeometry, int material) |
| Initialising the setFdBoundary3D function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename SCHEME_BOUND , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdBoundary3D (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF3D< T > > &&indicator) |
| Initialising the setFdBoundary3D function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename SCHEME_BOUND , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdBoundary3D (BlockLattice< T, DESCRIPTOR > &_block, BlockIndicatorF3D< T > &indicator, bool includeOuterCells) |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdPostProcessor2D (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, DESCRIPTOR::d > &superGeometry, int material) |
| Initialising the setFdPostProcessor function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdPostProcessor2D (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&indicator) |
| Initialising the setFdPostProcessor function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdPostProcessor2D (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF< T, DESCRIPTOR::d > &indicator) |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdPostProcessor3D (SuperLattice< T, DESCRIPTOR > &sLattice, SuperGeometry< T, DESCRIPTOR::d > &superGeometry, int material) |
| Initialising the setFdPostProcessor function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdPostProcessor3D (SuperLattice< T, DESCRIPTOR > &sLattice, FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > &&indicator) |
| Initialising the setFdPostProcessor function on the superLattice domain. | |
| template<typename T , typename DESCRIPTOR , typename MODEL , typename PARAMETERS , typename FIELD = descriptors::AD_FIELD, typename SOURCE = void> | |
| void | setFdPostProcessor3D (BlockLattice< T, DESCRIPTOR > &block, BlockIndicatorF< T, DESCRIPTOR::d > &indicator) |
| template<typename SOLVER > | |
| std::function< void()> | doPostProcess (std::shared_ptr< SOLVER > solver) |
| Returns a function that encapsulates the solving process. | |
| template<class SOLVER > | |
| std::shared_ptr< SOLVER > | createLbSolver (XMLreader const &xml) |
| template<typename PARAMETERS , typename TAG > | |
| std::shared_ptr< PARAMETERS > | createParameters (XMLreader const &xml) |
| template<class parameters_map > | |
| auto | createParametersTuple (XMLreader const &xml) |
| double | henyeyGreenstein (double cosTheta, double g) |
| Function to compute Henyey Greenstein phase funtion. | |
| template<int q, typename DESCRIPTOR > | |
| std::array< double, q > | testEnergyConservationColumn (const std::array< std::array< double, q >, q > &phi) |
| template<int q, typename DESCRIPTOR > | |
| std::array< double, q > | testEnergyConservationRow (const std::array< std::array< double, q >, q > &phi) |
| template<int q> | |
| std::array< double, q > | testAnisotropyConservationColumn (const std::array< std::array< double, q >, q > &phi, const double weights[q], std::array< std::array< double, q >, q > &cosTheta) |
| std::vector< double > | linespace (double const stepsize, double const a, double const b) |
| Computes vector [a, a+stepsize, a+2*stepsize, ..., b]. | |
| template<typename DESCRIPTOR > | |
| void | computeAnisotropyMatrix (double const stepsize, double const anisotropyFactor, double solution[(DESCRIPTOR::q-1) *((DESCRIPTOR::q-1)+1)/2], std::array< std::array< double, DESCRIPTOR::q-1 >, DESCRIPTOR::q-1 > &phi, int const breakAfter=-1) |
| template<typename DESCRIPTOR > | |
| void | computeAnisotropyMatrixKimAndLee (double const anisotropyFactor, std::array< std::array< double, DESCRIPTOR::q >, DESCRIPTOR::q > &phi) |
| Expr | operator+ (Expr lhs, Expr rhs) |
| Expr | operator- (Expr lhs, Expr rhs) |
| Expr | operator* (Expr lhs, Expr rhs) |
| Expr | operator/ (Expr lhs, Expr rhs) |
| Expr | operator- (Expr rhs) |
| template<typename T , bool check = false> | |
| T | getConfinedPermeability (T latticeViscosity, T latticeRelaxationTime, T physDeltaX, T charPhysLength, T physPermeability) |
| template<typename T , typename DESCRIPTOR , bool check = false> | |
| T | getConfinedPermeability (const UnitConverter< T, DESCRIPTOR > &converter, T physPermeability) |
| template<typename T > | |
| T | getPhysPermeability (T latticeViscosity, T latticeRelaxationTime, T physDeltaX, T charPhysLength, T confinedPermeability) |
| template<typename T , typename DESCRIPTOR , bool check = false> | |
| T | getPhysPermeability (const UnitConverter< T, DESCRIPTOR > &converter, T confinedPermeability) |
Arithmetic for functors managed by std::shared_ptr | |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator+ (std::shared_ptr< SuperF2D< T, W > > lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator+ (std::shared_ptr< SuperF2D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator+ (W lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator- (std::shared_ptr< SuperF2D< T, W > > lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator- (std::shared_ptr< SuperF2D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator- (W lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator* (std::shared_ptr< SuperF2D< T, W > > lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator* (std::shared_ptr< SuperF2D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator* (W lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator/ (std::shared_ptr< SuperF2D< T, W > > lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator/ (std::shared_ptr< SuperF2D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF2D< T, W > > | operator/ (W lhs, std::shared_ptr< SuperF2D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator+ (std::shared_ptr< SuperF3D< T, W > > lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator+ (std::shared_ptr< SuperF3D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator+ (W lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator- (std::shared_ptr< SuperF3D< T, W > > lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator- (std::shared_ptr< SuperF3D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator- (W lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator* (std::shared_ptr< SuperF3D< T, W > > lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator* (std::shared_ptr< SuperF3D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator* (W lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator/ (std::shared_ptr< SuperF3D< T, W > > lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator/ (std::shared_ptr< SuperF3D< T, W > > lhs, W rhs) |
| template<typename T , typename W > | |
| std::shared_ptr< SuperF3D< T, W > > | operator/ (W lhs, std::shared_ptr< SuperF3D< T, W > > rhs) |
Variables | |
| template<typename T , typename SOLVER > | |
| std::function< T(const std::vector< T > &, unsigned) | getCallable )(std::shared_ptr< SOLVER > solver) |
| Returns a function that encapsulates the solving process. | |
Top level namespace for all of OpenLB.
Linear damping Force for magnetic dipolemoment in magnetic Field.
to calculate the magnetic force on particles around a cylinder (J.
Drag Force by Schiller and Naumann for low and high particle Re [Schiller, L.;Naumann, Z.; A Drag Coefficient Correlation; VDI Zeitung, 1935, p. 318-320].
All OpenLB code is contained in this namespace.
This class is intended to provide the ability to write particle data.
A super geometry represents a parrallel voxel mesh.
These are functors used for turbulent flows.
A fringe zone is a spatial domain, which is included into the computational domain to aim a transition from turbulent into laminar flow.
The functor dimensions are given by F: S^m -> T^n (S=source, T=target) and are implemented via GenericF(n,m).
Don't get confused by the flipped order of source and target.
It is often applied to improve the use of artificial boundary conditions.
lambda_max
_____________
/ \
/ \
/ \
/ \
/ \
________/ ________ |x_start | x_ende |--—| |--—| b_rise b_fall
fringe function: lambda(x) = lambda_max*[S((x-x_start)/(b_rise)) - S((x-x_end)/(b_fall)+1)] The fringe function sets the strength of the damping. The maximum strength is lambda_max and the shape of the function is defined by the stepfunction S(x) and the parameters b_rise and b_fall.
lambda_max: maximal damping force x_start: begin of the fringe zone x_end: end of the fringe zone b_rise: rise distance b_fall: fall distance
S is a smooth step function: S(x)=0, for x<=0 S(x)=1/( 1 + util::exp( (1/(x-1)) + (1/x) ) ), for 0<x<1, S(x)=1, for x>=1.
--> G = lambda*(U - u) is the volume force, which is added to the flow equations in order to transfer the actual velocity into the wanted velocity field
u: actual velocity U: wanted velocity - either average profil or poiseuille profile
BibteX listing of the main paper:
@TECHREPORT{lundbladh:99, author = {Anders Lundbladh and Stellan Berlin and Martin Skote and Casper Hildings and Jaisig Choi and John Kim and Dan Henningson}, title = {An Efficient Spectral Method for Simulation of Incompressible Flow Over a Flat Plate}, institution = {not set}, url = {http://www.fluidosol.se/thesismod/paper9.pdf}, year = {1999} }
Some like AMD have an execute member function which writes the data into the external field of a lattice descriptor.
A super geometry consits of a number of block geometries, where the material numbers are stored. It is constructed from a cuboid geometry. All coboids of the cuboid geometry are asigned to block geometries which are extended by an overlap in order to enable efficient parallelisation.
By the class access is provied to the material numbers of the mesh. Methods for renaming materials are provided as well as a statistic class.
This class is not intended to be derived from.
The overall structure is, however, similar to the one of the SuperVTMwriter3D rather than to the SuperParticleSysVtuWriter. This was done to merge it to the SuperVTMwriter3D someday. The following differences do not alllow this a the moment though:
The SuperVTMwriter3D does not take the DESCRIPTOR as argument. The present one does as this is necessary for the underlying datatype. In order to destinguish between particles and the lattice, the descriptor should be included though. As soon as the differences are removed, a generic 2D/3D parallized/nonparallized VTKwriter class can be implemented providing all functionality. WARNING: Due to this, some functionality was not bothered to be implemented ( e.g. compression and binary writeout).
Lindner et al. / Computers and Chemical Engineering 54 (2013) 111-121)
| using olb::AdvectionDiffusionBGKdynamics |
This approach contains a slight error in the diffusion term.
Definition at line 136 of file advectionDiffusionDynamics.h.
| using olb::AdvectionDiffusionMRTdynamics |
This approach is based on the multi-distribution LBM model.
The coupling is done using the Boussinesq approximation
Definition at line 704 of file advectionDiffusionDynamics.h.
| using olb::AdvectionDiffusionRLBdynamics |
Definition at line 77 of file advectionDiffusionDynamics.h.
| using olb::AdvectionDiffusionTRTdynamics |
This approach contains a slight error in the diffusion term.
Definition at line 148 of file advectionDiffusionDynamics.h.
| using olb::AdvectionLocalDiffusionBoundariesDynamics |
Definition at line 105 of file advectionDiffusionBoundaries.h.
| using olb::AdvectionLocalDiffusionCornerDynamics2D |
Definition at line 225 of file advectionDiffusionBoundaries.h.
| using olb::AdvectionLocalDiffusionCornerDynamics3D |
Definition at line 285 of file advectionDiffusionBoundaries.h.
| using olb::AdvectionLocalDiffusionEdgesDynamics |
Definition at line 165 of file advectionDiffusionBoundaries.h.
| using olb::AnalyticalComposed2D = AnalyticalComposed<2,T,S> |
Definition at line 368 of file analyticalF.h.
| using olb::AnalyticalComposed3D = AnalyticalComposed<3,T,S> |
Definition at line 370 of file analyticalF.h.
| using olb::AnalyticalConst1D = AnalyticalConst<1,T,S> |
Definition at line 361 of file analyticalF.h.
| using olb::AnalyticalConst2D = AnalyticalConst<2,T,S> |
Definition at line 363 of file analyticalF.h.
| using olb::AnalyticalConst3D = AnalyticalConst<3,T,S> |
Definition at line 365 of file analyticalF.h.
| using olb::AnalyticalF1D = AnalyticalF<1,T,S> |
Definition at line 88 of file analyticalBaseF.h.
| using olb::AnalyticalF2D = AnalyticalF<2,T,S> |
Definition at line 90 of file analyticalBaseF.h.
| using olb::AnalyticalF3D = AnalyticalF<3,T,S> |
Definition at line 92 of file analyticalBaseF.h.
| using olb::AnalyticalIdentity1D = AnalyticalIdentity<1,T,S> |
Definition at line 95 of file analyticalBaseF.h.
| using olb::AnalyticalIdentity2D = AnalyticalIdentity<2,T,S> |
Definition at line 97 of file analyticalBaseF.h.
| using olb::AnalyticalIdentity3D = AnalyticalIdentity<3,T,S> |
Definition at line 99 of file analyticalBaseF.h.
| using olb::AnalyticalRandom1D = AnalyticalRandomOld<1,T,S> |
Definition at line 373 of file analyticalF.h.
| using olb::AnalyticalRandom2D = AnalyticalRandomOld<2,T,S> |
Definition at line 375 of file analyticalF.h.
| using olb::AnalyticalRandom3D = AnalyticalRandomOld<3,T,S> |
Definition at line 377 of file analyticalF.h.
| using olb::AnalyticCalcDivision = AnalyticCalcF<D,T,S,util::divides> |
division functor
Definition at line 87 of file analyticCalcF.h.
| using olb::AnalyticCalcDivision1D = AnalyticCalcDivision<1,T,S> |
Definition at line 90 of file analyticCalcF.h.
| using olb::AnalyticCalcDivision2D = AnalyticCalcDivision<2,T,S> |
Definition at line 92 of file analyticCalcF.h.
| using olb::AnalyticCalcDivision3D = AnalyticCalcDivision<3,T,S> |
Definition at line 94 of file analyticCalcF.h.
| using olb::AnalyticCalcMinus = AnalyticCalcF<D,T,S,util::minus> |
subtraction functor
Definition at line 65 of file analyticCalcF.h.
| using olb::AnalyticCalcMinus1D = AnalyticCalcMinus<1,T,S> |
Definition at line 68 of file analyticCalcF.h.
| using olb::AnalyticCalcMinus2D = AnalyticCalcMinus<2,T,S> |
Definition at line 70 of file analyticCalcF.h.
| using olb::AnalyticCalcMinus3D = AnalyticCalcMinus<3,T,S> |
Definition at line 72 of file analyticCalcF.h.
| using olb::AnalyticCalcMultiplication = AnalyticCalcF<D,T,S,util::multiplies> |
multiplication functor
Definition at line 76 of file analyticCalcF.h.
| using olb::AnalyticCalcMultiplication1D = AnalyticCalcMultiplication<1,T,S> |
Definition at line 79 of file analyticCalcF.h.
| using olb::AnalyticCalcMultiplication2D = AnalyticCalcMultiplication<2,T,S> |
Definition at line 81 of file analyticCalcF.h.
| using olb::AnalyticCalcMultiplication3D = AnalyticCalcMultiplication<3,T,S> |
Definition at line 83 of file analyticCalcF.h.
| using olb::AnalyticCalcPlus = AnalyticCalcF<D,T,S,util::plus> |
addition functor
Definition at line 54 of file analyticCalcF.h.
| using olb::AnalyticCalcPlus1D = AnalyticCalcPlus<1,T,S> |
Definition at line 57 of file analyticCalcF.h.
| using olb::AnalyticCalcPlus2D = AnalyticCalcPlus<2,T,S> |
Definition at line 59 of file analyticCalcF.h.
| using olb::AnalyticCalcPlus3D = AnalyticCalcPlus<3,T,S> |
Definition at line 61 of file analyticCalcF.h.
| using olb::BaseType = typename util::BaseTypeHelper<T>::type |
Definition at line 59 of file baseType.h.
| using olb::BGKdynamics |
Common BGK collision step.
Definition at line 72 of file dynamics.h.
| using olb::BlockCalcDivision2D = BlockCalcF2D<T,util::divides> |
Block level division functor.
Definition at line 92 of file blockCalcF2D.h.
| using olb::BlockCalcDivision3D = BlockCalcF3D<T,util::divides> |
Block level division functor.
Definition at line 92 of file blockCalcF3D.h.
| using olb::BlockCalcMinus2D = BlockCalcF2D<T,util::minus> |
Block level subtraction functor (T==bool: Without)
Definition at line 84 of file blockCalcF2D.h.
| using olb::BlockCalcMinus3D = BlockCalcF3D<T,util::minus> |
Block level subtraction functor (T==bool: Without)
Definition at line 84 of file blockCalcF3D.h.
| using olb::BlockCalcMultiplication2D = BlockCalcF2D<T,util::multiplies> |
Block level multiplication functor (T==bool: Intersection)
Definition at line 88 of file blockCalcF2D.h.
| using olb::BlockCalcMultiplication3D = BlockCalcF3D<T,util::multiplies> |
Block level multiplication functor (T==bool: Intersection)
Definition at line 88 of file blockCalcF3D.h.
| using olb::BlockCalcPlus2D = BlockCalcF2D<T,util::plus> |
Block level addition functor (T==bool: Union)
Definition at line 80 of file blockCalcF2D.h.
| using olb::BlockCalcPlus3D = BlockCalcF3D<T,util::plus> |
Block level addition functor (T==bool: Union)
Definition at line 80 of file blockCalcF3D.h.
| using olb::BlockF |
| using olb::BlockGeometry2D = BlockGeometry<T,2> |
Definition at line 210 of file blockGeometry.h.
| using olb::BlockGeometry3D = BlockGeometry<T,3> |
Definition at line 213 of file blockGeometry.h.
| using olb::BlockGeometryStatistics |
| using olb::BlockIndicatorBoundaryNeighbor |
| using olb::BlockIndicatorF |
| using olb::BlockIndicatorFfromIndicatorF |
| using olb::BlockIndicatorMaterial |
| using olb::BlockLatticeF |
| using olb::BlockLatticeInterpPhysVelocity |
| using olb::BlockLatticePhysF |
| using olb::BlockStructure = BlockStructureD<DESCRIPTOR::d> |
Definition at line 296 of file blockStructure.h.
| using olb::BounceBack |
Bounce Back boundary dynamics.
This is a very popular way to implement no-slip boundary conditions, due to the simplicity and due to the independence of the boundary's orientation.
Definition at line 266 of file dynamics.h.
| using olb::BounceBackBulkDensity |
Bounce Back boundary dynamics with bulk density.
Different from BounceBack these dynamics compute the 0th moment from the cell's populations instead of applying a fixed value.
Definition at line 285 of file dynamics.h.
| using olb::BounceBackVelocity |
Bounce Back boundary dynamics with Nguyen-Ladd velocity correction.
This is a very popular way to implement no-slip boundary conditions, due to the simplicity and due to the independence of the boundary's orientation.
Definition at line 304 of file dynamics.h.
| using olb::CellDistance = std::int64_t |
Type for in-memory distance of block-local cell indices.
Definition at line 39 of file blockStructure.h.
| using olb::CellID = std::uint32_t |
Type for sequential block-local cell indices.
Definition at line 36 of file blockStructure.h.
| using olb::ChopardDynamics |
Definition at line 380 of file dynamics.h.
| using olb::Column = cpu::sisd::Column<T> |
| using olb::Communicator |
| using olb::ConSmagorinskyBGKdynamics |
Consistent Smagorinsky BGK collision step.
Consistent subgrid scale modelling for lattice Boltzmann methods Orestis Malaspinas and Pierre Sagaut Journal of Fluid Mechanics / Volume / June 2012, pp 514-542 DOI: http://dx.doi.org/10.1017/jfm.2012.155
Definition at line 133 of file smagorinskyBGKdynamics.h.
| using olb::ConStrainSmagorinskyBGKdynamics |
Consistent Strain Smagorinsky BGK collision step.
Consistent subgrid scale modelling for lattice Boltzmann methods Orestis Malaspinas and Pierre Sagaut Journal of Fluid Mechanics / Volume / June 2012, pp 514-542 DOI: http://dx.doi.org/10.1017/jfm.2012.155
Definition at line 118 of file smagorinskyBGKdynamics.h.
| using olb::ConstRhoBGKdynamics |
Pressure-corrected BGK collision step.
Definition at line 84 of file dynamics.h.
| using olb::Cuboid |
| using olb::CuboidGeometry |
| using olb::CUMdynamics |
Implementation partially based on: Geier, Martin, et al.
"The cumulant lattice Boltzmann equation in three dimensions: Theory and validation." Computers & Mathematics with Applications 70.4 (2015): 507-547.
Definition at line 38 of file cumulantDynamics.h.
| using olb::CyclicColumn = cpu::sisd::CyclicColumn<T> |
| using olb::DBBParticleBGKdynamics |
Definition at line 506 of file porousBGKdynamics.h.
| using olb::DualPorousBGKDynamics |
Definition at line 135 of file dualDynamics.h.
| using olb::EquilibriumBoundaryFirstOrder |
First order equilibrium boundary dynamics.
Applies the first order equilibrium distribution on every time step using fixed density and velocity moments.
Definition at line 393 of file dynamics.h.
| using olb::EquilibriumBoundarySecondOrder |
Second order equilibrium boundary dynamics.
Applies the second order equilibrium distribution on every time step using fixed density and velocity moments.
Definition at line 406 of file dynamics.h.
| using olb::ExternalSmagorinskyBGKdynamics |
Smagorinsky BGK collision step with per-cell Smagorinsky constant.
Definition at line 142 of file smagorinskyBGKdynamics.h.
| using olb::ExternalTauEffLESBGKadvectionDiffusionDynamics |
LES BGK collision for advection diffusion using non-local TAU_EFF per-cell field.
Definition at line 102 of file smagorinskyBGKdynamics.h.
| using olb::ExternalTauEffLESBGKdynamics |
LES BGK collision using non-local TAU_EFF per-cell field.
Definition at line 58 of file smagorinskyBGKdynamics.h.
| using olb::ExternalTauEffLESForcedBGKdynamics |
LES BGK collision with Guo forcing using non-local TAU_EFF per-cell field.
Definition at line 67 of file smagorinskyBGKdynamics.h.
| using olb::ExternalTauForcedIncBGKdynamics |
Incompressible BGK collision step with relaxation frequency 1 / TAU_EFF and external force.
Definition at line 165 of file dynamics.h.
| using olb::FieldD |
Vector storing a single field instance.
Definition at line 43 of file fieldArrayD.h.
| using olb::ForcedBGKdynamics |
BGK collision step with external force (Guo)
Guo Z, Zheng C, Shi B (2002) Discrete lattice effects on the forcing term in the lattice Boltzmann method. Phys Rev E 65(4) DOI: 10.1103/PhysRevE.65.046308
Definition at line 98 of file dynamics.h.
| using olb::ForcedIncBGKdynamics |
Incompressible BGK collision step with external force.
Using Guo forcing on incompressible BGK
Definition at line 155 of file dynamics.h.
| using olb::ForcedKupershtokhBGKdynamics |
BGK collision step with external force (Kupershtokh)
Kupershtokh A, Medvedev D, Karpov D (2009) On equations of state in a lattice Boltzmann method. Comput Math Appl 58(5) DOI: 10.1016/j.camwa.2009.02.024
Definition at line 123 of file dynamics.h.
| using olb::ForcedMRTdynamics |
Definition at line 53 of file mrtDynamics.h.
| using olb::ForcedShanChenBGKdynamics |
BGK collision step with external force (Shan and Chen)
Shan X, Chen H (1993) Lattice Boltzmann model for simulating flows with multiple phases and components. Phys Rev E. 47 (3) DOI: 10.1103/PhysRevE.47.1815
Definition at line 138 of file dynamics.h.
| using olb::ForcedTRTdynamics |
TRT collision step with external force.
Using Guo forcing on incompressible BGK
Definition at line 251 of file dynamics.h.
| using olb::FreeEnergyBGKdynamics |
Definition at line 178 of file freeEnergyDynamics.h.
| using olb::FreeEnergyInletOutletDynamics |
Definition at line 199 of file freeEnergyDynamics.h.
| using olb::FreeEnergyWallDynamics |
Definition at line 186 of file freeEnergyDynamics.h.
| using olb::GuoZhaoBGKdynamics |
Definition at line 190 of file guoZhaoDynamics.h.
| using olb::IncBGKdynamics = dynamics::Tuple<T,DESCRIPTOR,MOMENTA,equilibria::Incompressible,collision::BGK> |
Incompressible BGK collision step.
Definition at line 148 of file dynamics.h.
| using olb::IndicatorCuboid |
| using olb::IndicatorF |
| using olb::KBCdynamics |
Definition at line 44 of file kbcDynamics.h.
| using olb::KrauseBGKdynamics |
Krause BGK collision step.
Definition at line 161 of file smagorinskyBGKdynamics.h.
| using olb::KrauseHBGKdynamics |
HBGK collision step for a porosity model enabling drag computation for many particles including the Krause turbulence modell.
Definition at line 516 of file porousBGKdynamics.h.
| using olb::LatticeCouplingGenerator |
| using olb::LatticeR = Vector<std::int32_t,D> |
Type for spatial block-local lattice coordinates.
Definition at line 43 of file blockStructure.h.
| using olb::MRTdynamics |
Original implementation based on: D'Humieres et al., "Multiple-relaxation-time lattice Boltzmann models in three dimensions", Phil: Trans.
R. soc. Lond. A (2002) 360, 437-451 and Yu et al,, "LES of turbulent square jet flow using an MRT lattice Boltzmann model", Computers & Fluids 35 (2006), 957-965
Definition at line 45 of file mrtDynamics.h.
| using olb::MultiComponentForcedBGKdynamics |
Definition at line 108 of file dynamics.h.
| using olb::MultiFieldArrayForDescriptorD = typename MultiFieldArrayForDescriptorHelper<T,DESCRIPTOR,PLATFORM>::type |
MultiFieldArrayD containing each field in DESCRIPTOR::fields_t.
Definition at line 636 of file fieldArrayD.h.
| using olb::NoCollideDynamics |
Definition at line 713 of file advectionDiffusionDynamics.h.
| using olb::NoDynamics |
Dynamics for "dead cells" doing nothing.
Definition at line 48 of file dynamics.h.
| using olb::NoDynamicsWithZero |
Dynamics for "dead cells" doing nothing. Variant with density=0.
Definition at line 63 of file dynamics.h.
| using olb::P1Dynamics |
P1 dynamics.
Definition at line 334 of file dynamics.h.
| using olb::ParametersOfDynamicsD |
Deduce ParametersD of DYNAMICS w.r.t. its value type and descriptor.
Definition at line 190 of file fieldParametersD.h.
| using olb::ParametersOfOperatorD |
Deduce ParametersD of OPERATOR w.r.t. T and DESCRIPTOR.
Definition at line 184 of file fieldParametersD.h.
| using olb::PartialBounceBack |
Corresponds to macro Robin boundary, micro Fresnel surface Motivated by Hiorth et al.
2008; doi 10.1002/fld.1822
Definition at line 316 of file dynamics.h.
| using olb::PhysR = Vector<T,D> |
Type for spatial (physical) coordinates.
Definition at line 47 of file blockStructure.h.
| using olb::PoissonDynamics |
Poisson dynamics.
Definition at line 325 of file dynamics.h.
| using olb::PorousBGKdynamics |
Porous BGK collision step.
Definition at line 36 of file porousBGKdynamics.h.
| using olb::PorousForcedBGKdynamics |
BGK collision step for a porosity model.
Definition at line 37 of file porousForcedBGKDynamics.h.
| using olb::PorousParticleBGKdynamics |
Porous particle BGK collision for moving particles.
Definition at line 468 of file porousBGKdynamics.h.
| using olb::PorousParticleGuoForcedBGKdynamics |
Guo forced BGK collision for moving porous media (HLBM approach)
Definition at line 55 of file porousForcedBGKDynamics.h.
| using olb::PorousParticleKupershtokhForcedBGKdynamics |
Kuperstokh forced BGK collision for moving porous media (HLBM approach)
Definition at line 173 of file porousForcedBGKDynamics.h.
| using olb::PorousParticlePowerLawBGKdynamics |
BGK collision using Power Law collision frequency.
Definition at line 36 of file porousPowerLawBGKdynamics.h.
| using olb::PorousParticlePowerLawForcedBGKdynamics |
BGK collision using Power Law collision frequency with Guo forcing.
Definition at line 45 of file porousPowerLawBGKdynamics.h.
| using olb::PorousParticlePowerLawHerschelBulkleyBGKdynamics |
BGK collision using Power Law (Herschel Bulkley) collision frequency.
Definition at line 55 of file porousPowerLawBGKdynamics.h.
| using olb::PorousParticlePowerLawHerschelBulkleyForcedBGKdynamics |
BGK collision using Power Law (Herschel Bulkley) collision frequency with Guo forcing.
Definition at line 64 of file porousPowerLawBGKdynamics.h.
| using olb::PorousParticleShanChenForcedBGKdynamics |
ShanChen forced BGK collision for moving porous media (HLBM approach)
Definition at line 75 of file porousForcedBGKDynamics.h.
| using olb::PostProcessor |
| using olb::PostProcessorGenerator |
| using olb::PowerLawBGKdynamics |
BGK collision using Power Law collision frequency.
Definition at line 168 of file powerLawBGKdynamics.h.
| using olb::PowerLawForcedBGKdynamics |
BGK collision using Power Law collision frequency with Guo forcing.
Definition at line 177 of file powerLawBGKdynamics.h.
| using olb::PowerLawHerschelBulkleyBGKdynamics |
BGK collision using Power Law (Herschel Bulkley) collision frequency.
Definition at line 187 of file powerLawBGKdynamics.h.
| using olb::PowerLawHerschelBulkleyForcedBGKdynamics |
BGK collision using Power Law (Herschel Bulkley) collision frequency with Guo forcing.
Definition at line 196 of file powerLawBGKdynamics.h.
| using olb::PSMBGKdynamics |
Partially Saturated Method (PSM), see Krüger, Timm, et al.
The Lattice Boltzmann Method. Springer, 2017. (p.447-451)
Definition at line 535 of file porousBGKdynamics.h.
| using olb::RLBdynamics |
Regularized BGK collision step.
This model is substantially more stable than plain BGK, and has roughly the same efficiency. However, it cuts out the modes at higher Knudsen numbers and can not be used in the regime of rarefied gases.
Definition at line 180 of file dynamics.h.
| using olb::ShearSmagorinskyBGKdynamics |
Shear Smarorinsky BGK collision step.
Shown good results for wall-bounded flows Leveque et al.: Shear-Improved Smagorinsky Model for Large-Eddy Simulation of Wall-Bounded Turbulent Flows DOI: http://dx.doi.org/10.1017/S0022112006003429
Definition at line 83 of file smagorinskyBGKdynamics.h.
| using olb::ShearSmagorinskyForcedBGKdynamics |
Shear Smarorinsky BGK collision step with Guo forcing.
Definition at line 92 of file smagorinskyBGKdynamics.h.
| using olb::SmagorinskyBGKdynamics |
Smagorinsky BGK collision step.
Definition at line 39 of file smagorinskyBGKdynamics.h.
| using olb::SmagorinskyForcedBGKdynamics |
Smagorinsky BGK collision step with Guo forcing.
Definition at line 48 of file smagorinskyBGKdynamics.h.
| using olb::SmagorinskyForcedMRTdynamics |
Smagorinsky MRT collision step with Ladd-Verberg forcing.
Definition at line 47 of file smagorinskyMRTdynamics.h.
| using olb::SmagorinskyGuoZhaoBGKdynamics |
Definition at line 199 of file guoZhaoDynamics.h.
| using olb::SmagorinskyLinearVelocityForcedBGKdynamics |
ForcedBGK collision step computing OMEGA locally using Smagorinsky LES model.
Definition at line 170 of file smagorinskyBGKdynamics.h.
| using olb::SmagorinskyMRTdynamics |
Smagorinsky MRT collision step.
Definition at line 38 of file smagorinskyMRTdynamics.h.
| using olb::SmagorinskyPorousParticleBGKdynamics |
BGK collision step for a porosity model.
Definition at line 488 of file porousBGKdynamics.h.
| using olb::SmagorinskyPowerLawBGKdynamics |
Smagorinsky BGK collision using Power Law collision frequency.
Definition at line 206 of file powerLawBGKdynamics.h.
| using olb::SmagorinskyPowerLawForcedBGKdynamics |
Smagorinsky BGK collision using Power Law collision frequency and Guo forcing.
Definition at line 215 of file powerLawBGKdynamics.h.
| using olb::SmagorinskyPowerLawPorousParticleBGKdynamics |
Smagorinsky BGK collision using Power Law collision frequency for porous particles.
Definition at line 225 of file powerLawBGKdynamics.h.
| using olb::SmallParticleBGKdymaics |
BGK collision step for a small particles enabling two way coupling.
Definition at line 525 of file porousBGKdynamics.h.
| using olb::SmoothIndicatorF |
| using olb::StaticPorousParticleBGKdynamics |
Porous particle BGK collision for static particles.
Definition at line 478 of file porousBGKdynamics.h.
| using olb::StaticPorousParticleGuoForcedBGKdynamics |
Guo forced BGK static collision for moving porous media (HLBM approach)
Definition at line 65 of file porousForcedBGKDynamics.h.
| using olb::StaticPorousParticleKupershtokhForcedBGKdynamics |
Kuperstokh forced BGK static collision for moving porous media (HLBM approach)
Definition at line 183 of file porousForcedBGKDynamics.h.
| using olb::StaticPorousParticleShanChenForcedBGKdynamics |
ShanChen forced BGK static collision for moving porous media (HLBM approach)
Definition at line 85 of file porousForcedBGKDynamics.h.
| using olb::SubgridParticleBGKdynamics |
Definition at line 497 of file porousBGKdynamics.h.
| using olb::SuperAbsoluteErrorL1Norm2D = SuperAbsoluteErrorLpNorm2D<T,W,1> |
Definition at line 83 of file superErrorNorm2D.h.
| using olb::SuperAbsoluteErrorL1Norm3D = SuperAbsoluteErrorLpNorm3D<T,W,1> |
Definition at line 83 of file superErrorNorm3D.h.
| using olb::SuperAbsoluteErrorL2Norm2D = SuperAbsoluteErrorLpNorm2D<T,W,2> |
Definition at line 86 of file superErrorNorm2D.h.
| using olb::SuperAbsoluteErrorL2Norm3D = SuperAbsoluteErrorLpNorm3D<T,W,2> |
Definition at line 86 of file superErrorNorm3D.h.
| using olb::SuperAbsoluteErrorLinfNorm2D = SuperAbsoluteErrorLpNorm2D<T,W,0> |
Definition at line 89 of file superErrorNorm2D.h.
| using olb::SuperAbsoluteErrorLinfNorm3D = SuperAbsoluteErrorLpNorm3D<T,W,0> |
Definition at line 89 of file superErrorNorm3D.h.
| using olb::SuperCalcDivision2D = SuperCalcF2D<T,W,util::divides> |
Division functor.
Definition at line 83 of file superCalcF2D.h.
| using olb::SuperCalcDivision3D = SuperCalcF3D<T,W,util::divides> |
Division functor.
Definition at line 86 of file superCalcF3D.h.
| using olb::SuperCalcMinus2D = SuperCalcF2D<T,W,util::minus> |
Subtraction functor (W==bool: Without)
Definition at line 75 of file superCalcF2D.h.
| using olb::SuperCalcMinus3D = SuperCalcF3D<T,W,util::minus> |
Subtraction functor (W==bool: Without)
Definition at line 78 of file superCalcF3D.h.
| using olb::SuperCalcMultiplication2D = SuperCalcF2D<T,W,util::multiplies> |
Multiplication functor (W==bool: Intersection)
Definition at line 79 of file superCalcF2D.h.
| using olb::SuperCalcMultiplication3D = SuperCalcF3D<T,W,util::multiplies> |
Multiplication functor (W==bool: Intersection)
Definition at line 82 of file superCalcF3D.h.
| using olb::SuperCalcPlus2D = SuperCalcF2D<T,W,util::plus> |
Addition functor (W==bool: Union)
Definition at line 71 of file superCalcF2D.h.
| using olb::SuperCalcPlus3D = SuperCalcF3D<T,W,util::plus> |
Addition functor (W==bool: Union)
Definition at line 74 of file superCalcF3D.h.
| using olb::SuperCalcPower2D = SuperCalcF2D<T,W,util::power> |
Power functor.
Definition at line 87 of file superCalcF2D.h.
| using olb::SuperCalcPower3D = SuperCalcF3D<T,W,util::power> |
Power functor.
Definition at line 90 of file superCalcF3D.h.
| using olb::SuperF |
| using olb::SuperField |
| using olb::SuperGeometryStatistics |
| using olb::SuperIndicatorBoundaryNeighbor |
| using olb::SuperIndicatorF |
| using olb::SuperIndicatorFfromIndicatorF |
| using olb::SuperIndicatorMaterial |
| using olb::SuperL1Norm2D = SuperLpNorm2D<T,W,1> |
Functor that returns the L1 norm over omega of the the euklid norm of the input functor.
Definition at line 94 of file superLpNorm2D.h.
| using olb::SuperL1Norm3D = SuperLpNorm3D<T,W,1> |
Functor that returns the L1 norm over omega of the the euklid norm of the input functor.
Definition at line 94 of file superLpNorm3D.h.
| using olb::SuperL2Norm2D = SuperLpNorm2D<T,W,2> |
Functor that returns the L2 norm over omega of the the euklid norm of the input functor.
Definition at line 98 of file superLpNorm2D.h.
| using olb::SuperL2Norm3D = SuperLpNorm3D<T,W,2> |
Functor that returns the L2 norm over omega of the the euklid norm of the input functor.
Definition at line 98 of file superLpNorm3D.h.
| using olb::SuperLatticeCuboid |
| using olb::SuperLatticeF |
| using olb::SuperLatticeGeometry |
| using olb::SuperLatticeInterpPhysVelocity |
| using olb::SuperLatticeMomentumExchangeForce |
Definition at line 108 of file latticeMomentumExchangeForce.h.
| using olb::SuperLatticePhysF |
| using olb::SuperLatticeRank |
| using olb::SuperLatticeStokesDragForce |
Definition at line 115 of file latticeMomentumExchangeForce.h.
| using olb::SuperLinfNorm2D = SuperLpNorm2D<T,W,0> |
Functor that returns the Linf norm over omega of the the euklid norm of the input functor.
Definition at line 102 of file superLpNorm2D.h.
| using olb::SuperLinfNorm3D = SuperLpNorm3D<T,W,0> |
Functor that returns the Linf norm over omega of the the euklid norm of the input functor.
Definition at line 102 of file superLpNorm3D.h.
| using olb::SuperRelativeErrorL1Norm2D = SuperRelativeErrorLpNorm2D<T,W,1> |
Definition at line 53 of file superErrorNorm2D.h.
| using olb::SuperRelativeErrorL1Norm3D = SuperRelativeErrorLpNorm3D<T,W,1> |
Definition at line 53 of file superErrorNorm3D.h.
| using olb::SuperRelativeErrorL2Norm2D = SuperRelativeErrorLpNorm2D<T,W,2> |
Definition at line 56 of file superErrorNorm2D.h.
| using olb::SuperRelativeErrorL2Norm3D = SuperRelativeErrorLpNorm3D<T,W,2> |
Definition at line 56 of file superErrorNorm3D.h.
| using olb::SuperRelativeErrorLinfNorm2D = SuperRelativeErrorLpNorm2D<T,W,0> |
Definition at line 59 of file superErrorNorm2D.h.
| using olb::SuperRelativeErrorLinfNorm3D = SuperRelativeErrorLpNorm3D<T,W,0> |
Definition at line 59 of file superErrorNorm3D.h.
| using olb::SuperVTMwriter |
| using olb::TRTdynamics |
TRT collision step.
Definition at line 239 of file dynamics.h.
| using olb::VTIwriter |
Definition at line 157 of file vtkWriter.h.
| using olb::VTUwriter |
Definition at line 145 of file vtkWriter.h.
| using olb::WALEBGKdynamics |
WALE LES BGK collision step.
Definition at line 152 of file smagorinskyBGKdynamics.h.
|
strong |
Mode of reducing block data from given, possibly higher dimensional data.
Required for optimizing block reduction functors such as BlockReduction3D2D if hyperplane is axis-aligned i.e. trivially discretizable.
| Enumerator | |
|---|---|
| Analytical | Interpolate block data at exact physical locations. |
| Discrete | Read block data from discrete lattice locations. |
Definition at line 35 of file blockDataReductionMode.h.
|
strong |
Mode of synchronizing functor block data between processes.
Required for optimizing functor operations to various usage patterns.
i.e. the convention is for the full domain to be available on every rank but this is not ideal in most usage scenarios of reduction functors.
e.g. the primary user of BlockReduction3D2D, BlockGifWriter, only requires full data to be available on the rank where its io is performed (rank 0).
SuperLatticeFlux3D only requires rank-local data to be available. Any further synchronization would potentially impact performance in this critical area.
| Enumerator | |
|---|---|
| ReduceAndBcast | default behavior, full block data available on all ranks after update |
| ReduceOnly | optimize for usage in e.g. BlockGifWriter, full data only available on main rank |
| None | optimize for usage in e.g. SuperLatticeFlux3D, only rank-local data available |
Definition at line 43 of file blockDataSyncMode.h.
|
strong |
Collision dispatch strategy.
| Enumerator | |
|---|---|
| Dominant | Apply dominant dynamics using mask and fallback to virtual dispatch for others. |
| Individual | Apply all dynamics individually (async for Platform::GPU_CUDA) |
Definition at line 88 of file operator.h.
|
strong |
Block-wide operator application scopes.
Declares how the actual OPERATOR::apply template wants to be called.
| Enumerator | |
|---|---|
| PerCell | Per-cell application, i.e. OPERATOR::apply is passed a CELL concept implementation. |
| PerBlock | Per-block application, i.e. OPERATOR::apply is passed a ConcreteBlockLattice. |
| PerCellWithParameters | Per-cell application with parameters, i.e. OPERATOR::apply is passed a CELL concept implementation and parameters. |
Definition at line 54 of file operator.h.
|
strong |
|
strong |
OpenLB processing contexts.
Currently of no relevance for CPU_SISD and CPU_SIMD target platforms
Used to control synchronization between mirrored device and host data for non-host processed block lattices.
Preliminary for first GPU release.
| Enumerator | |
|---|---|
| Evaluation | |
| Simulation | Data available on host for e.g. functor evaluation. Data available on device for evolving the simulation |
Definition at line 55 of file platform.h.
|
strong |
Mode of how to decide Quality of Grid.
| Enumerator | |
|---|---|
| None | No rounding. |
| NearestInteger | Rounds to nearest Integer. |
| Floor | Rounds up. |
| Ceil | Rounds down. |
Definition at line 30 of file roundingMode.h.
| enum olb::vtkType |
|
constexpr |
| std::enable_if_t< std::is_arithmetic< T >::type::value, T > olb::abs | ( | T | x | ) |
Definition at line 396 of file util.h.
References olb::util::fabs().
 Here is the call graph for this function: Here is the caller graph for this function:
Here is the call graph for this function: Here is the caller graph for this function:| void olb::addPoints2CommBC | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| int | _overlap ) |
Adds needed Cells to the Communicator _commBC in SuperLattice.
Definition at line 60 of file setBoundary2D.h.
References olb::SuperGeometry< T, D >::getBlockGeometry(), olb::SuperLattice< T, DESCRIPTOR >::getCommunicator(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::addPoints2CommBC | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| int | _overlap ) |
Adds needed Cells to the Communicator _commBC in SuperLattice.
Definition at line 57 of file setBoundary3D.h.
References olb::SuperGeometry< T, D >::getBlockGeometry(), olb::SuperLattice< T, DESCRIPTOR >::getCommunicator(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| olb::AnalyticalConcatenation | ( | AnalyticalF< D, T, S > & | , |
| G | g, | ||
| unsigned | _ = 1 ) -> AnalyticalConcatenation< D, std::remove_pointer_t< decltype(g(std::conditional_t< std::is_invocable_v< G, T >, T, T * >{}))>, T, S, std::is_invocable_v< G, T >, std::is_pointer_v< decltype(g(std::conditional_t< std::is_invocable_v< G, T >, T, T * >{}))> > |
| olb::AnalyticalConcatenation | ( | AnalyticalF< D, T, S > & | , |
| U(*)(T) | g ) -> AnalyticalConcatenation< D, U, T, S, true, false > |
| olb::AnalyticalConcatenation | ( | AnalyticalF< D, T, S > & | , |
| wrapped_U(const T *) | , | ||
| unsigned | ) -> AnalyticalConcatenation< D, std::remove_pointer_t< wrapped_U >, T, S, false, std::is_pointer_v< wrapped_U > > |
| olb::AnalyticalConcatenation | ( | AnalyticalF< D, T, S > & | , |
| wrapped_U(T *) | , | ||
| unsigned | ) -> AnalyticalConcatenation< D, std::remove_pointer_t< wrapped_U >, T, S, false, std::is_pointer_v< wrapped_U > > |
| olb::AnalyticalDerivativeAD | ( | const F & | ) | -> AnalyticalDerivativeAD< F, typename F::targetType, typename F::sourceType, F::dim > |
| std::string olb::boolToStr | ( | O | input | ) |
Create readable bool string.
Definition at line 122 of file printUtils.h.
| void olb::buffer2serializer | ( | Serializer & | serializer, |
| const std::uint8_t * | buffer ) |
processes a buffer to a serializer
Definition at line 108 of file serializerIO.hh.
References olb::Serializer::getNextBlock(), and olb::Serializer::resetCounter().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Definition at line 109 of file platform.h.
|
inline |
Dispatcher for concrete platform access.
See e.g. ConcretizableBlockLattice usage in BlockLattice::getField
Definition at line 88 of file platform.h.
References CPU_SIMD, CPU_SISD, and GPU_CUDA.
Here is the caller graph for this function:| bool olb::checkCuboidNeighbourhoodConsistency | ( | std::map< int, std::vector< int > > & | neighbourhood, |
| bool | correct = false, | ||
| bool | verbose = false ) |
Consistency check for neighbour retrieval.
Definition at line 312 of file cuboidGeometry3D.h.
Here is the caller graph for this function:| void olb::checkPlatform | ( | ) |
Verifies requirements for using PLATFORM.
| void olb::checkPlatform< Platform::GPU_CUDA > | ( | ) |
Verifies availability of CUDA device and MPI support.
Definition at line 46 of file communicator.hh.
References olb::OstreamManager::setMultiOutput().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::checkPlatform< Platform::GPU_CUDA > | ( | ) |
Verifies availability of CUDA device and MPI support.
Definition at line 46 of file communicator.hh.
References olb::OstreamManager::setMultiOutput().
Here is the call graph for this function: Here is the caller graph for this function:| std::string olb::CLIreader::getValueOrFallback< std::string > | ( | const std::string & | name, |
| std::string | fallback ) const |
Definition at line 77 of file cliReader.h.
| bool olb::closeToZero | ( | const ScalarVector< T, D, IMPL > & | a | ) |
Returns true iff all components are within floating point error distance of 0.
Definition at line 75 of file scalarVector.h.
References olb::util::fabs().
Here is the call graph for this function:| void olb::computeAnisotropyMatrix | ( | double const | stepsize, |
| double const | anisotropyFactor, | ||
| double | solution[(DESCRIPTOR::q-1) *((DESCRIPTOR::q-1)+1)/2], | ||
| std::array< std::array< double, DESCRIPTOR::q-1 >, DESCRIPTOR::q-1 > & | phi, | ||
| int const | breakAfter = -1 ) |
| DESCRIPTOR | a lattice stencil |
| q | number of lattice stencils MINUS one, 0th direction not needed |
| stepsize | choose precision |
| anisotropyFactor | also known as g |
| solution | for debugging |
| phi | is anisotropy matrix(sym), element [i][j] probability of scattering from i into j (direction) |
| breakAfter | to limit endless iteration for testing |
Definition at line 132 of file anisoDiscr.h.
References linespace(), and olb::util::sqrt().
Here is the call graph for this function:| void olb::computeAnisotropyMatrixKimAndLee | ( | double const | anisotropyFactor, |
| std::array< std::array< double, DESCRIPTOR::q >, DESCRIPTOR::q > & | phi ) |
Definition at line 254 of file anisoDiscr.h.
References henyeyGreenstein(), and olb::util::sqrt().
Here is the call graph for this function:| auto olb::constructSharedCoupling | ( | COUPLER | , |
| MAP &&... | map ) |
Definition at line 343 of file superLatticeCoupling.h.
| CONCRETIZABLE::base_t * olb::constructUsingConcretePlatform | ( | Platform | platform, |
| ARGS &&... | args ) |
Definition at line 133 of file platform.h.
References CPU_SIMD, CPU_SISD, and GPU_CUDA.
Here is the caller graph for this function:| void olb::continueMinimizeByVolume | ( | CuboidGeometry3D< T > & | cGeometry, |
| IndicatorF3D< T > & | indicatorF, | ||
| int | nC ) |
Splits largest cuboid by-volume until there are nC cuboids.
Definition at line 36 of file cuboidGeometryMinimizer.h.
References olb::CuboidGeometry3D< T >::cuboids(), olb::CuboidGeometry3D< T >::get(), olb::CuboidGeometry3D< T >::getNc(), olb::CuboidGeometry3D< T >::remove(), and olb::CuboidGeometry3D< T >::shrink().
Here is the call graph for this function: Here is the caller graph for this function:| UnitConverter< T, DESCRIPTOR > olb::createADfractionalUnitConverter | ( | const UnitConverter< T, DESCRIPTOR > & | converter, |
| int | fraction, | ||
| T | targetLatticeRelaxationTime ) |
Definition at line 36 of file fractionalUnitConverter.h.
References olb::UnitConverter< T, DESCRIPTOR >::getCharPhysLength(), olb::UnitConverter< T, DESCRIPTOR >::getCharPhysPressure(), olb::UnitConverter< T, DESCRIPTOR >::getCharPhysVelocity(), olb::UnitConverter< T, DESCRIPTOR >::getPhysDeltaT(), olb::UnitConverter< T, DESCRIPTOR >::getPhysDeltaX(), and olb::UnitConverter< T, DESCRIPTOR >::getPhysDensity().
Here is the call graph for this function:| CuboidGeometry3D< T > * olb::createCuboidGeometry | ( | std::string | fileName | ) |
Load CuboidGeometry from XML File.
Definition at line 266 of file cuboidGeometry3D.h.
References olb::CuboidGeometry3D< T >::add(), olb::CuboidGeometry3D< T >::clearCuboids(), olb::CuboidGeometry3D< T >::get(), olb::CuboidGeometry3D< T >::getMotherCuboid(), and olb::CuboidGeometry3D< T >::getNc().
Here is the call graph for this function:| std::string olb::createFileName | ( | std::string | name | ) |
for .pvd masterFile
Definition at line 34 of file fileName.hh.
Here is the caller graph for this function:| std::string olb::createFileName | ( | std::string | name, |
| int | iT ) |
used for .pvd file per timeStep iT
Definition at line 42 of file fileName.hh.
| std::string olb::createFileName | ( | std::string | name, |
| int | iT, | ||
| int | iC ) |
every thread writes his cuboids iC per timeStep iT
Definition at line 67 of file fileName.hh.
| std::string olb::createFileName | ( | std::string | name, |
| std::string | functor, | ||
| int | iT, | ||
| int | iC ) |
to write functors instantaneously, without adding
Definition at line 85 of file fileName.hh.
| std::string olb::createFileName | ( | std::string | name, |
| std::string | functor, | ||
| int | iT = 0 ) |
to write functors instantaneously, without adding
Definition at line 77 of file fileName.hh.
| UnitConverter< T, DESCRIPTOR > olb::createFractionalUnitConverter | ( | const UnitConverter< T, DESCRIPTOR > & | converter, |
| int | fraction, | ||
| T | targetLatticeRelaxationTime ) |
Definition at line 59 of file fractionalUnitConverter.h.
| IndicatorCircle2D< S > * olb::createIndicatorCircle2D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 255 of file indicatorF2D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorCircle3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 795 of file indicatorF3D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorCone3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 864 of file indicatorF3D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| IndicatorCuboid2D< S > * olb::createIndicatorCuboid2D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 135 of file indicatorF2D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorCuboid3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 889 of file indicatorF3D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorCylinder3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
for debugging purpose
for debugging purpose
Definition at line 837 of file indicatorF3D.hh.
| IndicatorEquiTriangle2D< S > * olb::createIndicatorEquiTriangle2D | ( | XMLreader const & | params, |
| bool | verbose ) |
Definition at line 396 of file indicatorF2D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorF3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 957 of file indicatorF3D.hh.
References olb::XMLreader::begin(), and olb::XMLreader::getName().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorIntersection3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 941 of file indicatorF3D.hh.
References olb::XMLreader::begin(), and olb::XMLreader::end().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorSphere3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 817 of file indicatorF3D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| IndicatorTriangle2D< S > * olb::createIndicatorTriangle2D | ( | XMLreader const & | params, |
| bool | verbose ) |
Definition at line 317 of file indicatorF2D.hh.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorUnion3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 909 of file indicatorF3D.hh.
References olb::XMLreader::begin(), and olb::XMLreader::end().
Here is the call graph for this function:| std::shared_ptr< IndicatorF3D< S > > olb::createIndicatorWithout3D | ( | XMLreader const & | params, |
| bool | verbose = false ) |
Definition at line 925 of file indicatorF3D.hh.
References olb::XMLreader::begin(), and olb::XMLreader::end().
Here is the call graph for this function:| std::shared_ptr< SOLVER > olb::createLbSolver | ( | XMLreader const & | xml | ) |
Definition at line 338 of file lbSolver.h.
| LoadBalancer< T > * olb::createLoadBalancer | ( | std::string const & | fileName, |
| CuboidGeometry3D< T > * | cGeo = NULL ) |
Creator Function for LoadBalancer from fileName.
Definition at line 215 of file loadBalancer.h.
References createLoadBalancer(), olb::singleton::directories(), and olb::singleton::Directories::getLogOutDir().
Here is the call graph for this function:| LoadBalancer< T > * olb::createLoadBalancer | ( | XMLreader const & | xmlReader, |
| CuboidGeometry3D< T > * | cGeo = NULL ) |
Creator Function for LoadBalancer from XMLreader.
Definition at line 142 of file loadBalancer.h.
References olb::XMLreader::getAttribute(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function: Here is the caller graph for this function:| std::string olb::createParallelFileName | ( | std::string | name, |
| bool | withSize = true ) |
for parallel io, e.g. adds "_rank0000001" for rank=1, and optional "_size0000016" if withSize==true
for pararalle io, e.g. adds "_rank0000001" for rank=1
Definition at line 51 of file fileName.hh.
References olb::singleton::MpiManager::getRank(), olb::singleton::MpiManager::getSize(), and olb::singleton::mpi().
Here is the call graph for this function:| std::shared_ptr< PARAMETERS > olb::createParameters | ( | XMLreader const & | xml | ) |
Definition at line 360 of file solverParameters.h.
References olb::parameters::Reader< PARAMETERS, TAG >::read().
Here is the call graph for this function:| auto olb::createParametersTuple | ( | XMLreader const & | xml | ) |
Definition at line 369 of file solverParameters.h.
References olb::utilities::TypeIndexedTuple< MAP >::tuple, and olb::meta::tuple_for_each().
Here is the call graph for this function:| PowerLawUnitConverter< T, DESCRIPTOR > * olb::createPowerLawUnitConverter | ( | XMLreader const & | params | ) |
Definition at line 94 of file powerLawUnitConverter.hh.
References olb::util::pow(), olb::XMLreader::read(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| UnitConverter< T, DESCRIPTOR > * olb::createUnitConverter | ( | XMLreader const & | params | ) |
creator function with data given by a XML file
Definition at line 95 of file unitConverter.hh.
References olb::XMLreader::read(), and olb::XMLreader::setWarningsOn().
Here is the call graph for this function:| auto olb::crossProduct | ( | const ScalarVector< T, D, IMPL > & | a, |
| const ScalarVector< T, D, IMPL_ > & | b ) |
Definition at line 235 of file vector.h.
References crossProduct2D(), and crossProduct3D().
Here is the call graph for this function: Here is the caller graph for this function:
|
constexpr |
|
constexpr |
| std::function< void()> olb::doPostProcess | ( | std::shared_ptr< SOLVER > | solver | ) |
Returns a function that encapsulates the solving process.
Definition at line 328 of file lbSolver.h.
| olb::DynamicsPromise | ( | meta::id< DYNAMICS > | ) | -> DynamicsPromise< typename DYNAMICS::value_t, typename DYNAMICS::descriptor_t > |
Here is the caller graph for this function:| void olb::evaluateCuboidGeometryNeighbourhood | ( | CuboidGeometry2D< T > & | cuboidGeometry, |
| std::map< int, std::vector< int > > & | neighbourhood, | ||
| int | offset = 0 ) |
Evaluate complete neighbourhood and store in std::map.
Definition at line 166 of file cuboidGeometry2D.h.
References olb::CuboidGeometry2D< T >::getNc(), and olb::CuboidGeometry2D< T >::getNeighbourhood().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::evaluateCuboidGeometryNeighbourhood | ( | CuboidGeometry3D< T > & | cuboidGeometry, |
| std::map< int, std::vector< int > > & | neighbourhood, | ||
| int | offset = 0 ) |
Evaluate complete neighbourhood and store in std::map.
Definition at line 295 of file cuboidGeometry3D.h.
References olb::CuboidGeometry3D< T >::getNc(), and olb::CuboidGeometry3D< T >::getNeighbourhood().
Here is the call graph for this function:| T olb::getConfinedPermeability | ( | const UnitConverter< T, DESCRIPTOR > & | converter, |
| T | physPermeability ) |
Definition at line 51 of file permeability.h.
References olb::UnitConverter< T, DESCRIPTOR >::getCharPhysLength(), olb::UnitConverter< T, DESCRIPTOR >::getLatticeRelaxationTime(), olb::UnitConverter< T, DESCRIPTOR >::getLatticeViscosity(), and olb::UnitConverter< T, DESCRIPTOR >::getPhysDeltaX().
Here is the call graph for this function:| T olb::getConfinedPermeability | ( | T | latticeViscosity, |
| T | latticeRelaxationTime, | ||
| T | physDeltaX, | ||
| T | charPhysLength, | ||
| T | physPermeability ) |
Definition at line 32 of file permeability.h.
| std::vector< S > olb::getDataFromTag | ( | XMLreader const & | reader, |
| std::string | attrName, | ||
| int | nData ) |
Helper Function to retrieve nData-dimensional std::vector of type S from space separated tag.
Definition at line 253 of file cuboidGeometry3D.h.
References olb::XMLreader::getAttribute().
Here is the call graph for this function:| double olb::getFresnelFunction | ( | double const & | theta, |
| double const & | refractiveRelative ) |
Definition at line 244 of file radiativeUnitConverter.h.
References olb::util::cos(), getThetaRefracted(), and olb::util::pow().
Here is the call graph for this function: Here is the caller graph for this function:| std::unordered_set< int > olb::getLatticeMaterials | ( | const std::vector< SolidBoundary< T, D > > & | solidBoundaries | ) |
Get material numbers of multiple solid boundaries in std::vector.
Definition at line 64 of file wall.h.
Here is the caller graph for this function:| double olb::getPartialBBCoefficient | ( | double const & | latticeDiffusionCoefficient, |
| double const & | relativeRefractiveIndex ) |
Definition at line 278 of file radiativeUnitConverter.h.
References getRefractionFunction().
Here is the call graph for this function: Here is the caller graph for this function:| double olb::getPartialBBCoefficient | ( | RadiativeUnitConverter< T, DESCRIPTOR > const & | converter | ) |
Definition at line 55 of file radiativeUnitConverter.h.
References olb::RadiativeUnitConverter< T, DESCRIPTOR >::getLatticeDiffusion(), getPartialBBCoefficient(), and olb::RadiativeUnitConverter< T, DESCRIPTOR >::getRefractiveRelative().
Here is the call graph for this function:| T olb::getPhysPermeability | ( | const UnitConverter< T, DESCRIPTOR > & | converter, |
| T | confinedPermeability ) |
Definition at line 67 of file permeability.h.
References olb::UnitConverter< T, DESCRIPTOR >::getCharPhysLength(), olb::UnitConverter< T, DESCRIPTOR >::getLatticeRelaxationTime(), olb::UnitConverter< T, DESCRIPTOR >::getLatticeViscosity(), and olb::UnitConverter< T, DESCRIPTOR >::getPhysDeltaX().
Here is the call graph for this function:| T olb::getPhysPermeability | ( | T | latticeViscosity, |
| T | latticeRelaxationTime, | ||
| T | physDeltaX, | ||
| T | charPhysLength, | ||
| T | confinedPermeability ) |
Definition at line 59 of file permeability.h.
| bool olb::getRangeBlockGeometrySmoothIndicatorIntersection2D | ( | BlockGeometryStructure2D< T > & | blockGeometry, |
| SmoothIndicatorF2D< T, T, true > & | sIndicator, | ||
| T | invDeltaX, | ||
| std::vector< int > & | start, | ||
| std::vector< int > & | end ) |
| bool olb::getRangeBlockGeometrySmoothIndicatorIntersection3D | ( | BlockGeometryStructure3D< T > & | blockGeometry, |
| SmoothIndicatorF3D< T, T, true > & | sIndicator, | ||
| T | invDeltaX, | ||
| std::vector< int > & | start, | ||
| std::vector< int > & | end ) |
| double olb::getRefractionFunction | ( | const double & | refractiveRelative | ) |
Definition at line 264 of file radiativeUnitConverter.h.
References M_PI, R_j_diff(), and R_phi_diff().
Here is the call graph for this function: Here is the caller graph for this function:| double olb::getRefractionFunction | ( | RadiativeUnitConverter< T, DESCRIPTOR > const & | converter | ) |
Definition at line 62 of file radiativeUnitConverter.h.
References getRefractionFunction(), and olb::RadiativeUnitConverter< T, DESCRIPTOR >::getRefractiveRelative().
Here is the call graph for this function:| double olb::getThetaRefracted | ( | double const & | thetaIncident, |
| double const & | refractiveRelative ) |
Documentation of implemented functions found in 5.2.2 Biomedical Optics, Principles and Imaging; Wang 2007.
Definition at line 235 of file radiativeUnitConverter.h.
References olb::util::asin(), M_PI, and olb::util::sin().
Here is the call graph for this function: Here is the caller graph for this function:| double olb::henyeyGreenstein | ( | double | cosTheta, |
| double | g ) |
Function to compute Henyey Greenstein phase funtion.
| cosTheta | util::cos(theta) of scattering event with net direction theta |
| g | anisotropy factor |
Definition at line 55 of file anisoDiscr.h.
References olb::util::pow().
Here is the call graph for this function: Here is the caller graph for this function:
|
constexpr |
Returns true if platform is equal to Platform::CPU_*.
Definition at line 154 of file platform.h.
References CPU_SIMD, CPU_SISD, and GPU_CUDA.
Here is the caller graph for this function:| void olb::istr2serializer | ( | Serializer & | serializer, |
| std::istream & | istr, | ||
| bool | enforceUint = false ) |
processes an istr to a serializer, always in parallel
Definition at line 66 of file serializerIO.hh.
References olb::Base64Decoder< T >::decode(), olb::Serializer::getNextBlock(), and olb::Serializer::resetCounter().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlineconstexpr |
Returns true if lhs is lexicographically greater than rhs.
Definition at line 146 of file scalarVector.h.
|
inlineconstexpr |
Returns true if lhs is lexicographically greater or equal to rhs.
Definition at line 168 of file scalarVector.h.
|
inlineconstexpr |
Returns true if lhs is lexicographically smaller than rhs.
Definition at line 135 of file scalarVector.h.
|
inlineconstexpr |
Returns true if lhs is lexicographically smaller or equal to rhs.
Definition at line 157 of file scalarVector.h.
| std::vector< double > olb::linespace | ( | double const | stepsize, |
| double const | a, | ||
| double const | b ) |
Computes vector [a, a+stepsize, a+2*stepsize, ..., b].
| stepsize | |
| a | |
| b |
Definition at line 109 of file anisoDiscr.h.
References olb::util::nearZero().
Here is the call graph for this function: Here is the caller graph for this function:
|
constexpr |
Definition at line 400 of file vector.h.
References olb::util::max().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::minimizeByVolume | ( | CuboidGeometry3D< T > & | cGeometry, |
| IndicatorF3D< T > & | indicatorF, | ||
| int | nC ) |
Splits into nC cuboids by-volume.
Definition at line 74 of file cuboidGeometryMinimizer.h.
References continueMinimizeByVolume(), olb::CuboidGeometry3D< T >::shrink(), and olb::CuboidGeometry3D< T >::split().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::minimizeByWeight | ( | CuboidGeometry3D< T > & | cGeometry, |
| IndicatorF3D< T > & | indicatorF, | ||
| int | nC ) |
Definition at line 90 of file cuboidGeometryMinimizer.h.
References olb::CuboidGeometry3D< T >::cuboids(), olb::CuboidGeometry3D< T >::remove(), olb::CuboidGeometry3D< T >::setWeights(), olb::CuboidGeometry3D< T >::shrink(), and olb::CuboidGeometry3D< T >::splitByWeight().
Here is the call graph for this function: Here is the caller graph for this function:
|
constexpr |
Definition at line 391 of file vector.h.
References olb::util::min().
Here is the call graph for this function:
|
inlineconstexpr |
Euclidean vector norm.
Definition at line 66 of file scalarVector.h.
References norm_squared().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlineconstexpr |
Squared euclidean vector norm.
Definition at line 55 of file scalarVector.h.
Here is the caller graph for this function:
|
constexpr |
| void olb::olbInit | ( | int * | argc, |
| char *** | argv, | ||
| bool | multiOutput, | ||
| bool | verbose ) |
Verify requirements for using all enabled platforms
Definition at line 45 of file olbInit.cpp.
References checkPlatform< Platform::GPU_CUDA >(), olb::ompManager::init(), olb::singleton::MpiManager::init(), olb::ThreadPool::init(), olb::singleton::mpi(), olb::singleton::omp(), olb::singleton::pool(), and olb::OstreamManager::setMultiOutput().
Here is the call graph for this function:
|
inline |
Definition at line 141 of file freeSurfaceHelpers.h.
|
constexpr |
Inner product.
Definition at line 345 of file vector.h.
|
constexpr |
| std::shared_ptr< IndicatorF2D< S > > olb::operator* | ( | F1< S > & | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 240 of file indicCalc2D.hh.
| std::shared_ptr< IndicatorF3D< S > > olb::operator* | ( | F1< S > & | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 144 of file indicComb3D.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator* | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 121 of file analyticCalcF.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator* | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| T | rhs ) |
Definition at line 128 of file analyticCalcF.hh.
| std::shared_ptr< IndicatorF2D< S > > olb::operator* | ( | std::shared_ptr< F1< S > > | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 218 of file indicCalc2D.hh.
| std::shared_ptr< IndicatorF3D< S > > olb::operator* | ( | std::shared_ptr< F1< S > > | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 122 of file indicComb3D.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator* | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 180 of file superCalcF2D.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator* | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 187 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator* | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 180 of file superCalcF3D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator* | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 187 of file superCalcF3D.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator* | ( | T | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 135 of file analyticCalcF.hh.
|
constexpr |
| std::shared_ptr< SuperF2D< T, W > > olb::operator* | ( | W | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 194 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator* | ( | W | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 194 of file superCalcF3D.hh.
|
constexpr |
|
constexpr |
Definition at line 285 of file vector.h.
|
constexpr |
Definition at line 158 of file expr.h.
References olb::Expr::Add.
| std::shared_ptr< IndicatorF2D< S > > olb::operator+ | ( | F1< S > & | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 226 of file indicCalc2D.hh.
| std::shared_ptr< IndicatorF3D< S > > olb::operator+ | ( | F1< S > & | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 130 of file indicComb3D.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator+ | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 79 of file analyticCalcF.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator+ | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| T | rhs ) |
Definition at line 86 of file analyticCalcF.hh.
| std::shared_ptr< IndicatorF2D< S > > olb::operator+ | ( | std::shared_ptr< F1< S > > | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 204 of file indicCalc2D.hh.
| std::shared_ptr< IndicatorF3D< S > > olb::operator+ | ( | std::shared_ptr< F1< S > > | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Free function implements lhs+rhs, only for IndicaotrsF3D types through enable_if and is_base_of.
| S | usual type for source dimension of the functor |
| F1 | lhs has to be derived from IndicatorF3D, otherwise function is disabled |
| F2 | rhs |
Definition at line 108 of file indicComb3D.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator+ | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 138 of file superCalcF2D.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator+ | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 145 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator+ | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 138 of file superCalcF3D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator+ | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 145 of file superCalcF3D.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator+ | ( | T | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 93 of file analyticCalcF.hh.
|
constexpr |
| std::shared_ptr< SuperF2D< T, W > > olb::operator+ | ( | W | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 152 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator+ | ( | W | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 152 of file superCalcF3D.hh.
|
constexpr |
|
constexpr |
|
constexpr |
Definition at line 162 of file expr.h.
References olb::Expr::Sub.
| std::shared_ptr< IndicatorF2D< S > > olb::operator- | ( | F1< S > & | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 233 of file indicCalc2D.hh.
| std::shared_ptr< IndicatorF3D< S > > olb::operator- | ( | F1< S > & | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 137 of file indicComb3D.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator- | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 100 of file analyticCalcF.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator- | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| T | rhs ) |
Definition at line 107 of file analyticCalcF.hh.
| std::shared_ptr< IndicatorF2D< S > > olb::operator- | ( | std::shared_ptr< F1< S > > | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 211 of file indicCalc2D.hh.
| std::shared_ptr< IndicatorF3D< S > > olb::operator- | ( | std::shared_ptr< F1< S > > | lhs, |
| std::shared_ptr< F2< S > > | rhs ) |
Definition at line 115 of file indicComb3D.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator- | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 159 of file superCalcF2D.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator- | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 166 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator- | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 159 of file superCalcF3D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator- | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 166 of file superCalcF3D.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator- | ( | T | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 114 of file analyticCalcF.hh.
|
constexpr |
| std::shared_ptr< SuperF2D< T, W > > olb::operator- | ( | W | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 173 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator- | ( | W | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 173 of file superCalcF3D.hh.
|
constexpr |
Definition at line 170 of file expr.h.
References olb::Expr::Div.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator/ | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 142 of file analyticCalcF.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator/ | ( | std::shared_ptr< AnalyticalF< D, T, S > > | lhs, |
| T | rhs ) |
Definition at line 149 of file analyticCalcF.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator/ | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 201 of file superCalcF2D.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator/ | ( | std::shared_ptr< SuperF2D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 208 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator/ | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 201 of file superCalcF3D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator/ | ( | std::shared_ptr< SuperF3D< T, W > > | lhs, |
| W | rhs ) |
Definition at line 208 of file superCalcF3D.hh.
| std::shared_ptr< AnalyticalF< D, T, S > > olb::operator/ | ( | T | lhs, |
| std::shared_ptr< AnalyticalF< D, T, S > > | rhs ) |
Definition at line 156 of file analyticCalcF.hh.
| std::shared_ptr< SuperF2D< T, W > > olb::operator/ | ( | W | lhs, |
| std::shared_ptr< SuperF2D< T, W > > | rhs ) |
Definition at line 215 of file superCalcF2D.hh.
| std::shared_ptr< SuperF3D< T, W > > olb::operator/ | ( | W | lhs, |
| std::shared_ptr< SuperF3D< T, W > > | rhs ) |
Definition at line 215 of file superCalcF3D.hh.
|
inlineconstexpr |
Returns true if all lhs components are smaller than rhs.
Definition at line 99 of file scalarVector.h.
|
constexpr |
| auto & olb::operator<< | ( | std::basic_ostream< Ch, Tr > & | os, |
| const std::index_sequence< Is... > & | is ) |
Operator << for std::index_sequence.
Definition at line 49 of file printUtils.h.
References print_index_sequence().
Here is the call graph for this function:| auto & olb::operator<< | ( | std::basic_ostream< Ch, Tr > & | os, |
| FileName & | fileName ) |
Definition at line 68 of file plainWriter.h.
| auto & olb::operator<< | ( | std::basic_ostream< Ch, Tr > & | os, |
| std::array< T, N > & | array ) |
Operator << for std::array.
Definition at line 71 of file printUtils.h.
| auto & olb::operator<< | ( | std::basic_ostream< Ch, Tr > & | os, |
| std::list< args... > & | list ) |
Operator << for std::list.
Definition at line 83 of file printUtils.h.
| auto & olb::operator<< | ( | std::basic_ostream< Ch, Tr > & | os, |
| std::set< args... > & | set ) |
Operator << for std::set.
Definition at line 95 of file printUtils.h.
| auto & olb::operator<< | ( | std::basic_ostream< Ch, Tr > & | os, |
| std::unordered_set< args... > & | set ) |
Operator << for std::unordered_set.
Definition at line 107 of file printUtils.h.
| auto & olb::operator<< | ( | std::basic_ostream< Ch, Tr > & | os, |
| std::vector< args... > & | vec ) |
Operator << for std::vector.
Definition at line 59 of file printUtils.h.
|
inline |
Print vector entries to ostream in a human-readable fashion.
Definition at line 179 of file scalarVector.h.
|
inlineconstexpr |
Returns true if all lhs components are smaller or equal than rhs.
Definition at line 117 of file scalarVector.h.
|
constexpr |
|
inlineconstexpr |
Returns true if all lhs components are greater than rhs.
Definition at line 110 of file scalarVector.h.
|
constexpr |
|
inlineconstexpr |
Returns true if all lhs components are smaller or equal than rhs.
Definition at line 128 of file scalarVector.h.
|
constexpr |
|
inline |
Definition at line 145 of file freeSurfaceHelpers.h.
| olb::PostProcessorPromise | ( | meta::id< PP > | ) | -> PostProcessorPromise< typename PP::value_t, typename PP::descriptor_t > |
| void olb::print_index_sequence | ( | std::basic_ostream< Ch, Tr > & | os, |
| const std::index_sequence< Is... > | is ) |
Print std::index_sequence.
Definition at line 36 of file printUtils.h.
Here is the caller graph for this function:| double olb::R_j_diff | ( | double const & | theta, |
| double const & | refractiveRelative ) |
Definition at line 259 of file radiativeUnitConverter.h.
References olb::util::cos(), getFresnelFunction(), olb::util::pow(), and olb::util::sin().
Here is the call graph for this function: Here is the caller graph for this function:| double olb::R_phi_diff | ( | double const & | theta, |
| double const & | refractiveRelative ) |
Definition at line 254 of file radiativeUnitConverter.h.
References olb::util::cos(), getFresnelFunction(), and olb::util::sin().
Here is the call graph for this function: Here is the caller graph for this function:| T olb::residualPhysDiffusivity | ( | const UnitConverter< T, DESCRIPTOR > & | converterFractional, |
| T | physDiffusivity ) |
Definition at line 68 of file fractionalUnitConverter.h.
References olb::UnitConverter< T, DESCRIPTOR >::getPhysViscosity().
Here is the call graph for this function:| void olb::serializer2buffer | ( | Serializer & | serializer, |
| std::uint8_t * | buffer ) |
processes data from a serializer to a given buffer
Definition at line 96 of file serializerIO.hh.
References olb::Serializer::getNextBlock(), and olb::Serializer::resetCounter().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::serializer2ostr | ( | Serializer & | serializer, |
| std::ostream & | ostr, | ||
| bool | enforceUint = false ) |
processes data from a serializer to a given ostr, always in parallel
Definition at line 40 of file serializerIO.hh.
References olb::Base64Encoder< T >::encode(), olb::Serializer::getNextBlock(), olb::Serializer::getSize(), OLB_PRECONDITION, and olb::Serializer::resetCounter().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::setAdvectionDiffusionConvectionBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Add AdvectionDiffusionConvection boundary for any indicated cells inside the block domain.
set AdvectionDiffusionConvection boundary for any indicated cells inside the block domain
Definition at line 63 of file setAdvectionDiffusionConvectionBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setAdvectionDiffusionConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the AdvectionDiffusionConvectionBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setAdvectionDiffusionConvectionBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setAdvectionDiffusionConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the AdvectionDiffusionConvectionBoundary function on the superLattice domain This is an Advection Diffusion Boundary therefore mostly--> MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>
Initialising the AdvectionDiffusionConvectionBoundary function on the superLattice domain.
Definition at line 36 of file setAdvectionDiffusionConvectionBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setAdvectionDiffusionTemperatureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator ) |
Set AdvectionDiffusionTemperatureBoundary for any indicated cells inside the block domain.
Definition at line 54 of file setAdvectionDiffusionTemperatureBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setAdvectionDiffusionTemperatureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF2D< T > & | indicator ) |
Set AdvectionDiffusionTemperatureBoundary for indicated cells inside the block domain.
set AdvectionDiffusionTemperature boundary on indicated cells inside the block domains
Definition at line 53 of file setAdvectionDiffusionTemperatureBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), and olb::BlockIndicatorF2D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setAdvectionDiffusionTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattic, |
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the AdvectionDiffusionTemperatureBoundary on the superLattice domain.
Definition at line 42 of file setAdvectionDiffusionTemperatureBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setAdvectionDiffusionTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setAdvectionDiffusionTemperatureBoundary function on the superLattice domain.
Definition at line 42 of file setAdvectionDiffusionTemperatureBoundary3D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setAdvectionDiffusionTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the AdvectionDiffusionTemperatureBoundary on the superLattice domain This is an advection diffusion boundary -->MixinDynamics = AdvectionDiffusionRLBdynamics Moment-based boundary condition (see ref.
Initialising the AdvectionDiffusionTemperatureBoundary on the superLattice domain.
doi:10.1504/PCFD.2016.077296) if a single population is missing, otherwise non-equilibrium bounce-back is used (see ref. doi:10.1007/978-3-319-44649-3)
Definition at line 35 of file setAdvectionDiffusionTemperatureBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setAdvectionDiffusionTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setAdvectionDiffusionTemperatureBoundary function on the superLattice domain This is an AdvectionDiffusionBoundary therefore mostly --> MixinDynamics = AdvectionDiffusionRLBdynamics.
Initialising the setAdvectionDiffusionTemperatureBoundary function on the superLattice domain.
Definition at line 35 of file setAdvectionDiffusionTemperatureBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setBlockExternalParticleField | ( | BlockGeometryStructure2D< T > & | blockGeometry, |
| AnalyticalF< 2, T, T > & | velocity, | ||
| SmoothIndicatorF2D< T, T, true > & | sIndicator, | ||
| BlockLattice2D< T, DESCRIPTOR > & | extendedBlockLattice ) |
| void olb::setBlockExternalParticleField | ( | BlockGeometryStructure2D< T > & | blockGeometry, |
| AnalyticalF< 2, T, T > & | velocity, | ||
| SmoothIndicatorF2D< T, T, true > & | sIndicator, | ||
| BlockLattice2D< T, DESCRIPTOR > & | extendedBlockLattice, | ||
| Vector< T, 2 > | cellMin, | ||
| Vector< T, 2 > | cellMax, | ||
| Vector< bool, 2 > | periodic ) |
| void olb::setBlockExternalParticleField | ( | BlockGeometryStructure3D< T > & | blockGeometry, |
| AnalyticalF< 3, T, T > & | velocity, | ||
| SmoothIndicatorF3D< T, T, true > & | sIndicator, | ||
| BlockLattice3D< T, DESCRIPTOR > & | extendedBlockLattice ) |
| void olb::setBlockExternalParticleField | ( | BlockGeometryStructure3D< T > & | blockGeometry, |
| AnalyticalF< 3, T, T > & | velocity, | ||
| SmoothIndicatorF3D< T, T, true > & | sIndicator, | ||
| BlockLattice3D< T, DESCRIPTOR > & | extendedBlockLattice, | ||
| Vector< T, 3 > | cellMin, | ||
| Vector< T, 3 > | cellMax, | ||
| Vector< bool, 3 > | periodic ) |
| void olb::setBlockZetaParticleField | ( | BlockGeometryStructure2D< T > & | blockGeometry, |
| AnalyticalF< 2, T, T > & | velocity, | ||
| SmoothIndicatorF2D< T, T, true > & | sIndicator, | ||
| BlockLattice2D< T, DESCRIPTOR > & | extendedBlockLattice ) |
| void olb::setBounceBackBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | indicator ) |
Set bounce back boundary on indicated cells of lattice.
Definition at line 31 of file setBounceBackBoundary.h.
Here is the caller graph for this function:| void olb::setBounceBackBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, DESCRIPTOR::d > & | superGeometry, | ||
| int | material ) |
Set bounce back boundary on material cells of lattice.
Definition at line 40 of file setBounceBackBoundary.h.
References olb::SuperGeometry< T, D >::getMaterialIndicator(), and setBounceBackBoundary().
Here is the call graph for this function:| void olb::setBounceBackVelocityBoundary | ( | BlockIndicatorF3D< T > & | indicator, |
| T | omega, | ||
| bool | includeOuterCells, | ||
| BlockLattice< T, DESCRIPTOR > & | _block ) |
Set BounceBackVelocityBoundary for any indicated cells inside the block domain.
Definition at line 57 of file setBounceBackVelocityBoundary3D.hh.
References olb::BlockIndicatorF3D< T >::getBlockGeometry(), and setBoundary().
Here is the call graph for this function:| void olb::setBounceBackVelocityBoundary | ( | FunctorPtr< SuperIndicatorF3D< T > > && | indicator, |
| T | omega, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice ) |
Definition at line 40 of file setBounceBackVelocityBoundary3D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setBounceBackVelocityBoundary | ( | SuperGeometry< T, 3 > & | superGeometry, |
| int | material, | ||
| T | omega, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice ) |
Initialising the setLocalVelocityBoundary function on the superLattice domain.
Definition at line 34 of file setBounceBackVelocityBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| int | iX, | ||
| int | iY, | ||
| int | iZ, | ||
| Dynamics< T, DESCRIPTOR > * | dynamics ) |
Definition at line 45 of file setBoundary3D.h.
References olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::Dynamics< T, DESCRIPTOR >::initialize().
Here is the call graph for this function:| void olb::setBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| int | iX, | ||
| int | iY, | ||
| int | iZ, | ||
| Dynamics< T, DESCRIPTOR > * | dynamics, | ||
| PostProcessorGenerator3D< T, DESCRIPTOR > * | postProcessor ) |
sets boundary on indicated cells. This is a function, which can be used on many boundaries.
Definition at line 31 of file setBoundary3D.h.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::Dynamics< T, DESCRIPTOR >::initialize(), and olb::BlockStructureD< D >::isPadding().
Here is the call graph for this function:| void olb::setBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| int | iX, | ||
| int | iY, | ||
| Dynamics< T, DESCRIPTOR > * | dynamics ) |
Definition at line 48 of file setBoundary2D.h.
References olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::Dynamics< T, DESCRIPTOR >::initialize().
Here is the call graph for this function:| void olb::setBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| int | iX, | ||
| int | iY, | ||
| Dynamics< T, DESCRIPTOR > * | dynamics, | ||
| PostProcessorGenerator2D< T, DESCRIPTOR > * | postProcessor ) |
Definition at line 33 of file setBoundary2D.h.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::Dynamics< T, DESCRIPTOR >::initialize(), and olb::BlockStructureD< D >::isPadding().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::setBouzidiAdeDirichlet | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF< T, DESCRIPTOR::d > & | boundaryIndicator, | ||
| BlockIndicatorF< T, DESCRIPTOR::d > & | bulkIndicator, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | phi_d, | ||
| Cuboid< T, DESCRIPTOR::d > & | cuboid ) |
Definition at line 547 of file setBouzidiBoundary.h.
References olb::BlockStructureD< D >::forSpatialLocations(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockStructureD< D >::isInside().
Here is the call graph for this function:| void olb::setBouzidiAdeDirichlet | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF< T, DESCRIPTOR::d > & | boundaryIndicator, | ||
| BlockIndicatorF< T, DESCRIPTOR::d > & | bulkIndicator, | ||
| T | phi_d, | ||
| Cuboid< T, DESCRIPTOR::d > & | cuboid ) |
Definition at line 520 of file setBouzidiBoundary.h.
References olb::BlockStructureD< D >::forSpatialLocations(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockStructureD< D >::isInside().
Here is the call graph for this function:| void olb::setBouzidiAdeDirichlet | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | boundaryIndicator, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | phi_d, | ||
| std::vector< int > | bulkMaterials = std::vector<int>(1,1) ) |
Definition at line 509 of file setBouzidiBoundary.h.
| void olb::setBouzidiAdeDirichlet | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | boundaryIndicator, | ||
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | bulkIndicator, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | phi_d ) |
Definition at line 480 of file setBouzidiBoundary.h.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setBouzidiAdeDirichlet | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | boundaryIndicator, | ||
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | bulkIndicator, | ||
| T | phi_d ) |
Definition at line 462 of file setBouzidiBoundary.h.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setBouzidiAdeDirichlet | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | boundaryIndicator, | ||
| T | phi_d, | ||
| std::vector< int > | bulkMaterials = std::vector<int>(1,1) ) |
Definition at line 498 of file setBouzidiBoundary.h.
| void olb::setBouzidiAdeDirichlet | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, DESCRIPTOR::d > & | superGeometry, | ||
| int | material, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | phi_d, | ||
| std::vector< int > | bulkMaterials = std::vector<int>(1,1) ) |
Definition at line 453 of file setBouzidiBoundary.h.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setBouzidiAdeDirichlet | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, DESCRIPTOR::d > & | superGeometry, | ||
| int | material, | ||
| T | phi_d, | ||
| std::vector< int > | bulkMaterials = std::vector<int>(1,1) ) |
Definition at line 444 of file setBouzidiBoundary.h.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setBouzidiBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, | ||
| BlockIndicatorF< T, DESCRIPTOR::d > & | boundaryIndicator, | ||
| BlockIndicatorF< T, DESCRIPTOR::d > & | bulkIndicator, | ||
| IndicatorF< T, DESCRIPTOR::d > & | indicatorAnalyticalBoundary, | ||
| bool | verbose = false ) |
Set Bouzidi boundary on indicated cells of block lattice.
Definition at line 250 of file setBouzidiBoundary.h.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockStructureD< D >::forSpatialLocations(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockGeometry< T, D >::getDeltaR(), olb::BlockGeometry< T, D >::getIcGlob(), olb::BlockGeometry< T, D >::getMaterial(), olb::BlockGeometry< T, D >::getPhysR(), olb::BlockStructureD< D >::isInside(), olb::BlockStructureD< D >::isPadding(), norm(), and olb::OstreamManager::setMultiOutput().
Here is the call graph for this function:| void olb::setBouzidiBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | boundaryIndicator, | ||
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | bulkIndicator, | ||
| IndicatorF< T, DESCRIPTOR::d > & | indicatorAnalyticalBoundary ) |
Set Bouzidi boundary on indicated cells of sLattice.
Definition at line 213 of file setBouzidiBoundary.h.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), olb::SuperStructure< T, D >::getLoadBalancer(), and olb::OstreamManager::setMultiOutput().
Here is the call graph for this function:| void olb::setBouzidiBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, DESCRIPTOR::d > & | superGeometry, | ||
| int | materialOfSolidObstacle, | ||
| IndicatorF< T, DESCRIPTOR::d > & | indicatorAnalyticalBoundary, | ||
| std::vector< int > | bulkMaterials = std::vector<int>(1,1) ) |
Set Bouzidi boundary on material cells of sLattice.
Definition at line 234 of file setBouzidiBoundary.h.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setBouzidiVelocity | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF< T, DESCRIPTOR::d > & | boundaryIndicator, | ||
| BlockIndicatorF< T, DESCRIPTOR::d > & | bulkIndicator, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | u, | ||
| Cuboid< T, DESCRIPTOR::d > & | cuboid ) |
Set Bouzidi velocity boundary on indicated cells of block lattice.
Definition at line 401 of file setBouzidiBoundary.h.
References olb::BlockStructureD< D >::forSpatialLocations(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockStructureD< D >::isInside().
Here is the call graph for this function:| void olb::setBouzidiVelocity | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | boundaryIndicator, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | u, | ||
| std::vector< int > | bulkMaterials = std::vector<int>(1,1) ) |
Set Bouzidi velocity boundary on indicated cells of sLattice.
Definition at line 370 of file setBouzidiBoundary.h.
| void olb::setBouzidiVelocity | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | boundaryIndicator, | ||
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | bulkIndicator, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | u ) |
Set Bouzidi velocity boundary on indicated cells of sLattice.
Definition at line 382 of file setBouzidiBoundary.h.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setBouzidiVelocity | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, DESCRIPTOR::d > & | superGeometry, | ||
| int | material, | ||
| AnalyticalF< DESCRIPTOR::d, T, T > & | u, | ||
| std::vector< int > | bulkMaterials = std::vector<int>(1,1) ) |
Set Bouzidi velocity boundary on material cells of sLattice.
Definition at line 360 of file setBouzidiBoundary.h.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setExtFieldBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator ) |
Set externalFieldBoundary for any indicated cells inside the block domain.
Definition at line 59 of file setExtFieldBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setExtFieldBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the ExternalFieldBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setExtFieldBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setExtFieldBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the ExternalFieldBoundary on the superLattice domain This is an AdvectionDiffusionBoundary --> MixinDynamics = AdvectionDiffusionRLBdynamics<T,DESCRIPTOR>
Initialising the ExternalFieldBoundary on the superLattice domain.
Definition at line 35 of file setExtFieldBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFdBoundary2D | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set interpolated velocity boundary for any indicated cells inside the block domain.
Set Interpolated velocity boundary for any indicated cells inside the block domain.
Definition at line 65 of file setFdBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockIndicatorF2D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setFdBoundary2D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setFdBoundary2D function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setFdBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFdBoundary2D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setFdBoundary2D function on the superLattice domain Interpolated Boundaries use the BGKdynamics collision-operator.
Initialising the setFdBoundary2D function on the superLattice domain.
Definition at line 35 of file setFdBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFdBoundary3D | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Definition at line 65 of file setFdBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockStructureD< D >::forSpatialLocations(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), and olb::BlockGeometry< T, D >::getStatistics().
Here is the call graph for this function:| void olb::setFdBoundary3D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setFdBoundary3D function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setFdBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFdBoundary3D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setFdBoundary3D function on the superLattice domain.
Definition at line 35 of file setFdBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFdPostProcessor2D | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF< T, DESCRIPTOR::d > & | indicator ) |
Definition at line 50 of file setFdPostProcessor2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor().
Here is the call graph for this function:| void olb::setFdPostProcessor2D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | indicator ) |
Initialising the setFdPostProcessor function on the superLattice domain.
Definition at line 41 of file setFdPostProcessor2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFdPostProcessor2D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, DESCRIPTOR::d > & | superGeometry, | ||
| int | material ) |
Initialising the setFdPostProcessor function on the superLattice domain.
Definition at line 34 of file setFdPostProcessor2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFdPostProcessor3D | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF< T, DESCRIPTOR::d > & | indicator ) |
Definition at line 50 of file setFdPostProcessor3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor().
Here is the call graph for this function:| void olb::setFdPostProcessor3D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF< T, DESCRIPTOR::d > > && | indicator ) |
Initialising the setFdPostProcessor function on the superLattice domain.
Definition at line 41 of file setFdPostProcessor3D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFdPostProcessor3D | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, DESCRIPTOR::d > & | superGeometry, | ||
| int | material ) |
Initialising the setFdPostProcessor function on the superLattice domain.
Definition at line 34 of file setFdPostProcessor3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyInletBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| std::string | type, | ||
| int | latticeNumber, | ||
| bool | includeOuterCells = false ) |
Set FreeEnergyInletBoundary for any indicated cells inside the block domain.
Definition at line 62 of file setFreeEnergyInletBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and olb::Dynamics< T, DESCRIPTOR >::initialize().
Here is the call graph for this function:| void olb::setFreeEnergyInletBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| std::string | type, | ||
| int | latticeNumber, | ||
| bool | includeOuterCells = false ) |
Set FreeEnergyInlet boundary for any indicated cells inside the block domain.
Set Free Energy Inlet boundary for any indicated cells inside the block domain.
Definition at line 61 of file setFreeEnergyInletBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::defineDynamics(), olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setFreeEnergyInletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Initialising the Free Energy Inlet Boundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setFreeEnergyInletBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyInletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Initialising the FreeEnergyInletBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setFreeEnergyInletBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyInletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Implementation of a inlet boundary condition for the partner lattices of the binary or ternary free energy model.
Initialising the Free Energy Inlet Boundary on the superLattice domain.
FreeEnergyInletBoundary is local boundary Condition --> MixinDynamics = RLBdynamics Initialising the Free Energy Inlet Boundary on the superLattice domain
Definition at line 35 of file setFreeEnergyInletBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyInletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Initialising the FreeEnergyInletBoundary on the superLattice domain.
Definition at line 35 of file setFreeEnergyInletBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyOutletBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| T | omega, | ||
| std::string | type, | ||
| int | latticeNumber, | ||
| bool | includeOuterCells = false ) |
Set FreeEnergyOutletBoundary for any indicated cells inside the block domain.
Definition at line 68 of file setFreeEnergyOutletBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setFreeEnergyOutletBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| std::string | type, | ||
| int | latticeNumber, | ||
| bool | includeOuterCells = false ) |
Set FreeEnergyOutlet boundary for any indicated cells inside the block domain.
Definition at line 65 of file setFreeEnergyOutletBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF2D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setFreeEnergyOutletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Implementation of a outlet boundary condition for the partner lattices of the binary or ternary free energy model.
Initialising the Free Energy Outlet Boundary on the superLattice domain
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 45 of file setFreeEnergyOutletBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyOutletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Implementation of a outlet boundary condition for the partner lattices of the binary or the ternary free energy model.
Initialising the FreeEnergyOutletBoundary on the superLattice domain
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 47 of file setFreeEnergyOutletBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyOutletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Implementation of a outlet boundary condition for the partner lattices of the binary or ternary free energy model.
Initialising the Free Energy Outlet Boundary on the superLattice domain
Definition at line 36 of file setFreeEnergyOutletBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyOutletBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| std::string | type, | ||
| int | latticeNumber ) |
Implementation of a outlet boundary condition for the partner lattices of the binary or the ternary free energy model.
Initialising the FreeEnergyOutletBoundary on the superLattice domain
Definition at line 38 of file setFreeEnergyOutletBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| T | addend, | ||
| int | latticeNumber, | ||
| bool | includeOuterCells = false ) |
Definition at line 142 of file setFreeEnergyWallBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF2D< T > & | indicator, | ||
| T | addend, | ||
| int | latticeNumber, | ||
| bool | includeOuterCells = false ) |
Definition at line 138 of file setFreeEnergyWallBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockIndicatorF2D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | h1, | ||
| T | h2, | ||
| int | latticeNumber ) |
Initialising the Free Energy Wall Boundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 52 of file setFreeEnergyWallBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | kappa3, | ||
| T | h1, | ||
| T | h2, | ||
| T | h3, | ||
| int | latticeNumber ) |
Initialising the Free Energy Wall Boundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 105 of file setFreeEnergyWallBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | h1, | ||
| T | h2, | ||
| int | latticeNumber ) |
Initialising the Free Energy Wall Boundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 52 of file setFreeEnergyWallBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | kappa3, | ||
| T | h1, | ||
| T | h2, | ||
| T | h3, | ||
| int | latticeNumber ) |
Initialising the Free Energy Wall Boundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 108 of file setFreeEnergyWallBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | h1, | ||
| T | h2, | ||
| int | latticeNumber ) |
Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor.
| [in] | alpha_ | - Parameter related to the interface width. [lattice units] |
| [in] | kappa1_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa2_ | - Parameter related to surface tension. [lattice units] |
| [in] | h1_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h2_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | latticeNumber | - determines the number of the free energy lattice to set the boundary accordingly Initialising the Free Energy Wall Boundary on the superLattice domain |
| [in] | alpha_ | - Parameter related to the interface width. [lattice units] |
| [in] | kappa1_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa2_ | - Parameter related to surface tension. [lattice units] |
| [in] | h1_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h2_ | - Parameter related to resulting contact angle of the boundary. [lattice units] Initialising the Free Energy Wall Boundary on the superLattice domain |
Definition at line 43 of file setFreeEnergyWallBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | kappa3, | ||
| T | h1, | ||
| T | h2, | ||
| T | h3, | ||
| int | latticeNumber ) |
Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor.
| [in] | alpha_ | - Parameter related to the interface width. [lattice units] |
| [in] | kappa1_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa2_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa3_ | - Parameter related to surface tension. [lattice units] |
| [in] | h1_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h2_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h3_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | latticeNumber | - determines the number of the free energy lattice to set the boundary accordingly Initialising the Free Energy Wall Boundary on the superLattice domain |
| [in] | alpha_ | - Parameter related to the interface width. [lattice units] |
| [in] | kappa1_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa2_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa3_ | - Parameter related to surface tension. [lattice units] |
| [in] | h1_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h2_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h3_ | - Parameter related to resulting contact angle of the boundary. [lattice units] Initialising the Free Energy Wall Boundary on the superLattice domain |
Definition at line 96 of file setFreeEnergyWallBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | h1, | ||
| T | h2, | ||
| int | latticeNumber ) |
Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor.
| [in] | alpha_ | - Parameter related to the interface width. [lattice units] |
| [in] | kappa1_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa2_ | - Parameter related to surface tension. [lattice units] |
| [in] | h1_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h2_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | latticeNumber | - determines the number of the free energy lattice to set the boundary accordingly Initialising the Free Energy Wall Boundary on the superLattice domain |
Definition at line 42 of file setFreeEnergyWallBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setFreeEnergyWallBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| T | alpha, | ||
| T | kappa1, | ||
| T | kappa2, | ||
| T | kappa3, | ||
| T | h1, | ||
| T | h2, | ||
| T | h3, | ||
| int | latticeNumber ) |
Implementation of a wetting boundary condition for the ternary free energy model, consisting of a BounceBack dynamics and an FreeEnergyWall PostProcessor.
| [in] | alpha_ | - Parameter related to the interface width. [lattice units] |
| [in] | kappa1_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa2_ | - Parameter related to surface tension. [lattice units] |
| [in] | kappa3_ | - Parameter related to surface tension. [lattice units] |
| [in] | h1_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h2_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | h3_ | - Parameter related to resulting contact angle of the boundary. [lattice units] |
| [in] | latticeNumber | - determines the number of the free energy lattice to set the boundary accordingly Initialising the Free Energy Wall Boundary on the superLattice domain |
Definition at line 98 of file setFreeEnergyWallBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setInterpolatedConvectionBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| T * | uAv, | ||
| bool | includeOuterCells = false ) |
Add Interpolatedconvection boundary for any indicated cells inside the block domain.
set InterpolatedConvection boundary for any indicated cells inside the block domain
Definition at line 62 of file setInterpolatedConvectionBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setInterpolatedConvectionBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| T * | uAv, | ||
| bool | includeOuterCells = false ) |
Set InterpolatedConvectionBoundary for indicated cells inside the block domain.
Definition at line 60 of file setInterpolatedConvectionBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF2D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setInterpolatedConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| T * | uAv ) |
Initialising the InterpolatedConvectionBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 41 of file setInterpolatedConvectionBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setInterpolatedConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| T * | uAv ) |
Initialising the setInterpolatedConvectionBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 40 of file setInterpolatedConvectionBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setInterpolatedConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material, | ||
| T * | uAv ) |
Initialising the InterpolatedConvectionBoundary on the superLattice domain This is an interpolated boundary --> MixinDynamics = BGKdynamics Usually T* uAv = NULL;.
Initialising the InterpolatedConvectionBoundary on the superLattice domain.
Definition at line 35 of file setInterpolatedConvectionBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setInterpolatedConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| T * | uAv = NULL ) |
Initialising the setInterpolatedConvectionBoundary function on the superLattice domain This is an Interpolated Boundary --> MixinDynamics = BGKdynamics.
Initialising the setInterpolatedConvectionBoundary function on the superLattice domain.
Definition at line 32 of file setInterpolatedConvectionBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setInterpolatedPressureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Add interpolated pressure boundary for any indicated cells inside the block domain.
Definition at line 66 of file setInterpolatedPressureBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::singleton::exit(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setInterpolatedPressureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Add interpolated pressure boundary for any indicated cells inside the block domain.
Set interpolated pressure boundary for any indicated cells inside the block domain.
Definition at line 62 of file setInterpolatedPressureBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), and setBoundary().
Here is the call graph for this function:| void olb::setInterpolatedPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setInterpolatedPressureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setInterpolatedPressureBoundary2D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setInterpolatedPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setInterpolatedPressureBoundary function on the superLattice domain.
Definition at line 44 of file setInterpolatedPressureBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setInterpolatedPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setInterpolatedPressureBoundary function on the superLattice domain Interpolated Boundaries use the BGKdynamics collision-operator.
Initialising the setInterpolatedPressureBoundary function on the superLattice domain.
Definition at line 35 of file setInterpolatedPressureBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setInterpolatedPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setInterpolatedPressureBoundary function on the superLattice domain Interpolated Boundaries use usually the BGKdynamics collision-operator --> MixinDynamics = BGKdynamics<T,DESCRIPTOR>
Initialising the setInterpolatedPressureBoundary function on the superLattice domain.
Definition at line 36 of file setInterpolatedPressureBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setInterpolatedVelocityBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Definition at line 62 of file setInterpolatedVelocityBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setInterpolatedVelocityBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set interpolatedVelocityBoundary for any indicated cells inside the block domain.
Set Interpolated velocity boundary for any indicated cells inside the block domain.
Definition at line 63 of file setInterpolatedVelocityBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setInterpolatedVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setInterpolatedVelocityBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 41 of file setInterpolatedVelocityBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setInterpolatedVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setInterpolatedVelocityBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setInterpolatedVelocityBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setInterpolatedVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setInterpolatedVelocityBoundary function on the superLattice domain Interpolated Boundaries mostly use the BGKdynamics collision-operator --> MixinDynamics = BGKdynamics<T,DESCRIPTOR>
Initialising the setInterpolatedVelocityBoundary function on the superLattice domain.
Definition at line 34 of file setInterpolatedVelocityBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setInterpolatedVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setInterpolatedVelocityBoundary function on the superLattice domain.
Definition at line 35 of file setInterpolatedVelocityBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setLocalConvectionBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| T * | uAv, | ||
| bool | includeOuterCells = false ) |
Add local convection boundary for any indicated cells inside the block domain.
Add convection boundary for any indicated cells inside the block domain.
Definition at line 63 of file setLocalConvectionBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setLocalConvectionBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| T * | uAv, | ||
| bool | includeOuterCells = false ) |
Set LocalConvectionBoundary for indicated cells inside the block domain.
Definition at line 60 of file setLocalConvectionBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF2D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setLocalConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| T * | uAv ) |
Initialising the LocalConvectionBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 41 of file setLocalConvectionBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setLocalConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| T * | uAv ) |
Initialising the setLocalConvectionBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setLocalConvectionBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setLocalConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material, | ||
| T * | uAv = NULL ) |
Initialising the LocalConvectionBoundary on the superLattice domain This is a local boundary --> MixinDynamics = RLBdynamics.
Initialising the LocalConvectionBoundary on the superLattice domain.
Definition at line 35 of file setLocalConvectionBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setLocalConvectionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| T * | uAv = NULL ) |
Initialising the setLocalConvectionBoundary function on the superLattice domain.
Definition at line 35 of file setLocalConvectionBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setLocalPressureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Set pressure boundary for any indicated cells inside the block domain.
Definition at line 62 of file setLocalPressureBoundary3D.hh.
References olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setLocalPressureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set pressure boundary for any indicated cells inside the block domain.
Definition at line 62 of file setLocalPressureBoundary2D.hh.
References olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setLocalPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setLocalPressureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setLocalPressureBoundary2D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setLocalPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setLocalPressureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setLocalPressureBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setLocalPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setLocalPressureBoundary function on the superLattice domain Local Boundaries use the RLBdynamics collision operator.
Initialising the setLocalPressureBoundary function on the superLattice domain.
Definition at line 36 of file setLocalPressureBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setLocalPressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setLocalPressureBoundary function on the superLattice domain Local Boundaries use the RLBdynamics collision operator.
Initialising the setLocalPressureBoundary function on the superLattice domain.
Definition at line 35 of file setLocalPressureBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setLocalVelocityBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Set local velocity boundary for any indicated cells inside the block domain.
Definition at line 64 of file setLocalVelocityBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setLocalVelocityBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set local velocity boundary for any indicated cells inside the block domain.
Definition at line 62 of file setLocalVelocityBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setLocalVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setLocalVelocityBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setLocalVelocityBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setLocalVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setLocalVelocityBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setLocalVelocityBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setLocalVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setLocalVelocityBoundary function on the superLattice domain.
Definition at line 36 of file setLocalVelocityBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setLocalVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setLocalVelocityBoundary function on the superLattice domain.
Definition at line 36 of file setLocalVelocityBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setNewSlipBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Definition at line 106 of file setNewSlipBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::util::fabs(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), and setBoundary().
Here is the call graph for this function:| void olb::setNewSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Definition at line 89 of file setNewSlipBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setNewSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Definition at line 83 of file setNewSlipBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setPartialSlipBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | tuner, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set Partial Slip boundary for any indicated cells inside the block domain.
Definition at line 65 of file setPartialSlipBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF2D< T >::getBlockGeometry(), and olb::BlockGeometry< T, D >::getStatistics().
Here is the call graph for this function:| void olb::setPartialSlipBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | tuner, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set Partial Slip Boundary for any indicated cells inside the block domain.
Set Partial Slip boundary for any indicated cells inside the block domain.
Definition at line 64 of file setPartialSlipBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setPartialSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | tuner, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the Partial slip boundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 44 of file setPartialSlipBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setPartialSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | tuner, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the PartialSlipBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setPartialSlipBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setPartialSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | tuner, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the Partial slip boundary on the superLattice domain.
Definition at line 37 of file setPartialSlipBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setPartialSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | tuner, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the PartialSlipBoundary function on the superLattice domain.
Definition at line 36 of file setPartialSlipBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setRegularizedHeatFluxBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| T * | heatFlux ) |
Set RegularizedHeatFluxBoundary for indicated cells inside the block domain.
Definition at line 57 of file setRegularizedHeatFluxBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), olb::BlockGeometry< T, D >::getStatistics(), and setBoundary().
Here is the call graph for this function:| void olb::setRegularizedHeatFluxBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator, | ||
| T * | heatFlux = nullptr ) |
Initialising the RegularizedHeatFluxBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setRegularizedHeatFluxBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setRegularizedHeatFluxBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material, | ||
| T * | heatFlux = nullptr ) |
Initialising the RegularizedHeatFluxBoundary on the superLattice domain This is an advection diffusion boundary -->MixinDynamics = AdvectionDiffusionRLBdynamics.
Initialising the RegularizedHeatFluxBoundary on the superLattice domain.
Definition at line 35 of file setRegularizedHeatFluxBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setRegularizedTemperatureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator ) |
Set RegularizedTemperatureBoundary for indicated cells inside the block domain.
Definition at line 57 of file setRegularizedTemperatureBoundary2D.hh.
References olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::BlockStructureD< D >::getNx(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), olb::BlockGeometry< T, D >::getStatistics(), and setBoundary().
Here is the call graph for this function:| void olb::setRegularizedTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the RegularizedTemperatureBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setRegularizedTemperatureBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setRegularizedTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the RegularizedTemperatureBoundary on the superLattice domain This is an advection diffusion boundary -->MixinDynamics = AdvectionDiffusionRLBdynamics.
Initialising the RegularizedTemperatureBoundary on the superLattice domain.
Definition at line 34 of file setRegularizedTemperatureBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setRobinBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| T | omega, | ||
| bool | includeOuterCells = false, | ||
| bool | useOtherStrategy = false ) |
Set RobinBoundary for any indicated cells inside the block domain.
Definition at line 63 of file setRobinBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), and setBoundary().
Here is the call graph for this function:| void olb::setRobinBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setRobinBoundary function on the superLattice domain.
Definition at line 46 of file setRobinBoundary3D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setRobinBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setRobinBoundary function on the superLattice domain This is an AdvectionDiffusionBoundary therefore mostly --> MixinDynamics = AdvectionDiffusionRLBdynamics.
Initialising the setRobinBoundary function on the superLattice domain.
Definition at line 39 of file setRobinBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setRtlbmDiffuseConstTemperatureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| T | omega, | ||
| bool | includeOuterCells = false ) |
Set RtlbmDiffuseConstTemperatureBoundary for any indicated cells inside the block domain.
Definition at line 62 of file setRtlbmDiffuseConstTemperatureBoundary3D.hh.
References olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setRtlbmDiffuseConstTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setRtlbmDiffuseConstTemperatureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setRtlbmDiffuseConstTemperatureBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setRtlbmDiffuseConstTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setRtlbmDiffuseConstTemperatureBoundary function on the superLattice domain.
Definition at line 35 of file setRtlbmDiffuseConstTemperatureBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setRtlbmDiffuseTemperatureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| T | omega, | ||
| bool | includeOuterCells = false ) |
Set RtlbmDiffuseTemperatureBoundary for any indicated cells inside the block domain.
Definition at line 62 of file setRtlbmDiffuseTemperatureBoundary3D.hh.
References olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setRtlbmDiffuseTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setRtlbmDiffuseTemperatureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setRtlbmDiffuseTemperatureBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setRtlbmDiffuseTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setRtlbmDiffuseTemperatureBoundary function on the superLattice domain.
Definition at line 35 of file setRtlbmDiffuseTemperatureBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setRtlbmDirectedTemperatureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| T | omega, | ||
| bool | includeOuterCells = false ) |
Set RtlbmDirectedTemperatureBoundary for any indicated cells inside the block domain.
Definition at line 62 of file setRtlbmDirectedTemperatureBoundary3D.hh.
References olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setRtlbmDirectedTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setRtlbmDirectedTemperatureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setRtlbmDirectedTemperatureBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setRtlbmDirectedTemperatureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setRtlbmDirectedTemperatureBoundary function on the superLattice domain.
Definition at line 35 of file setRtlbmDirectedTemperatureBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setSlipBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
set slipBoundary for any indicated cells inside the block domain
Set slip boundary on blockLattice domain.
Definition at line 115 of file setSlipBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF2D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setSlipBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set slipBoundary for any indicated cells inside the block domain.
Set slip boundary for any indicated cells inside the block domain.
Definition at line 118 of file setSlipBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the SlipBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 95 of file setSlipBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setslipBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 100 of file setSlipBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), olb::SuperStructure< T, D >::getLoadBalancer(), and setSlipBoundary().
Here is the call graph for this function:| void olb::setSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the SlipBoundary on the superLattice domain.
Definition at line 88 of file setSlipBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::setSlipBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setslipBoundary function on the superLattice domain.
Definition at line 93 of file setSlipBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setSlipBoundaryWithDynamics | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Definition at line 62 of file setSlipBoundaryWithDynamics3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setSlipBoundaryWithDynamics | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set interpolated velocity boundary for any indicated cells inside the block domain.
Set Interpolated velocity boundary for any indicated cells inside the block domain.
sets momenta, dynamics and post processor on velocity boundary cells
sets momenta, dynamics and post processors on externalVelocityCorner Boundary cells
sets momenta, dynamics and post processors on internalVelocityCorner Boundary cells
sets momenta, dynamics and post processor on velocity boundary cells
sets momenta, dynamics and post processors on externalVelocityCorner Boundary cells
sets momenta, dynamics and post processors on internalVelocityCorner Boundary cells
Definition at line 61 of file setSlipBoundaryWithDynamics2D.hh.
References olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setSlipBoundaryWithDynamics | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setSlipBoundaryWithDynamics function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 41 of file setSlipBoundaryWithDynamics2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setSlipBoundaryWithDynamics | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setSlipBoundaryWithDynamics function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setSlipBoundaryWithDynamics3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setSlipBoundaryWithDynamics | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setSlipBoundaryWithDynamics function on the superLattice domain Interpolated Boundaries use the BGKdynamics collision-operator.
Initialising the setSlipBoundaryWithDynamics function on the superLattice domain.
Definition at line 34 of file setSlipBoundaryWithDynamics2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setSlipBoundaryWithDynamics | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setSlipBoundaryWithDynamics function on the superLattice domain.
Definition at line 35 of file setSlipBoundaryWithDynamics3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setSuperExternalPSMParticleField | ( | SuperGeometry< T, 2 > & | sGeometry, |
| int | material, | ||
| AnalyticalF2D< T, T > & | velocity, | ||
| T | size, | ||
| SuperLatticeF2D< T, DESCRIPTOR > & | epsilon, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice ) |
Definition at line 50 of file superLattice2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), olb::SuperGeometry< T, D >::getBlockGeometry(), olb::SuperStructure< T, D >::getLoadBalancer(), and olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setWallFunctionBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| wallFunctionParam< T > const & | wallFunctionParam, | ||
| IndicatorF3D< T > * | geoIndicator, | ||
| bool | includeOuterCells = false ) |
Set WallFunction boundary for any indicated cells inside the block domain.
Definition at line 71 of file setWallFunctionBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setWallFunctionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| wallFunctionParam< T > const & | wallFunctionParam, | ||
| IndicatorF3D< T > * | geoIndicator ) |
Initialising the WallFunctionBoundary on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 46 of file setWallFunctionBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setWallFunctionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| wallFunctionParam< T > const & | wallFunctionParam, | ||
| IndicatorF3D< T > * | geoIndicator = NULL ) |
Initialising the WallFunctionBoundary on the superLattice domain.
Definition at line 35 of file setWallFunctionBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setZeroDistributionBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator ) |
Definition at line 65 of file setZeroDistributionBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setZeroDistributionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 50 of file setZeroDistributionBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setZeroDistributionBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Definition at line 41 of file setZeroDistributionBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setZeroGradientBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| BlockIndicatorF3D< T > & | indicator ) |
Set ZeroGradientBoundary for any indicated cells inside the block domain.
Definition at line 57 of file setZeroGradientBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockLattice< T, DESCRIPTOR >::get(), and olb::BlockIndicatorF3D< T >::getBlockGeometry().
Here is the call graph for this function:| void olb::setZeroGradientBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setZeroGradientBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setZeroGradientBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setZeroGradientBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setZeroGradientBoundary function on the superLattice domain This is an AdvectionDiffusionBoundary therefore mostly --> MixinDynamics = AdvectionDiffusionRLBdynamics.
Initialising the setZeroGradientBoundary function on the superLattice domain.
Definition at line 35 of file setZeroGradientBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setZouHePressureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Set pressure boundary for any indicated cells inside the block domain.
Definition at line 62 of file setZouHePressureBoundary3D.hh.
References olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setZouHePressureBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set pressure boundary for any indicated cells inside the block domain.
set momenta,dynamics and post processors on cells
set momenta,dynamics and post processors on cells
Definition at line 63 of file setZouHePressureBoundary2D.hh.
References olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setZouHePressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setZouHePressureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 43 of file setZouHePressureBoundary2D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setZouHePressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setZouHePressureBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setZouHePressureBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setZouHePressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setZouHePressureBoundary function on the superLattice domain ZouHe Boundaries use the BGKdynamics collision operator.
Initialising the setZouHePressureBoundary function on the superLattice domain.
Definition at line 36 of file setZouHePressureBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setZouHePressureBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setZouHePressureBoundary function on the superLattice domain ZouHe Boundaries use the BGKdynamics collision operator.
Initialising the setZouHePressureBoundary function on the superLattice domain.
Definition at line 35 of file setZouHePressureBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setZouHeVelocityBoundary | ( | BlockLattice< T, DESCRIPTOR > & | _block, |
| T | omega, | ||
| BlockIndicatorF3D< T > & | indicator, | ||
| bool | includeOuterCells ) |
Set ZouHe velocity boundary for any indicated cells inside the block domain.
Definition at line 63 of file setZouHeVelocityBoundary3D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF3D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::Dynamics< T, DESCRIPTOR >::getParameters(), and setBoundary().
Here is the call graph for this function:| void olb::setZouHeVelocityBoundary | ( | BlockLattice< T, DESCRIPTOR > & | block, |
| T | omega, | ||
| BlockIndicatorF2D< T > & | indicator, | ||
| bool | includeOuterCells = false ) |
Set ZouHe velocity boundary for any indicated cells inside the block domain.
Definition at line 62 of file setZouHeVelocityBoundary2D.hh.
References olb::BlockLattice< T, DESCRIPTOR >::addPostProcessor(), olb::BlockIndicatorF2D< T >::getBlockGeometry(), olb::BlockLattice< T, DESCRIPTOR >::getDynamics(), olb::BlockStructureD< D >::getNx(), olb::BlockGeometry< T, D >::getStatistics(), and setBoundary().
Here is the call graph for this function:| void olb::setZouHeVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF2D< T > > && | indicator ) |
Initialising the setZouHeVelocityBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 41 of file setZouHeVelocityBoundary2D.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setZouHeVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| FunctorPtr< SuperIndicatorF3D< T > > && | indicator ) |
Initialising the setZouHeVelocityBoundary function on the superLattice domain.
Adds needed Cells to the Communicator _commBC in SuperLattice
Adds needed Cells to the Communicator _commBC in SuperLattice
Definition at line 42 of file setZouHeVelocityBoundary3D.hh.
References addPoints2CommBC(), olb::SuperLattice< T, DESCRIPTOR >::getBlock(), and olb::SuperStructure< T, D >::getLoadBalancer().
Here is the call graph for this function:| void olb::setZouHeVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 2 > & | superGeometry, | ||
| int | material ) |
Initialising the setZouHeVelocityBoundary function on the superLattice domain.
Definition at line 35 of file setZouHeVelocityBoundary2D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| void olb::setZouHeVelocityBoundary | ( | SuperLattice< T, DESCRIPTOR > & | sLattice, |
| T | omega, | ||
| SuperGeometry< T, 3 > & | superGeometry, | ||
| int | material ) |
Initialising the setZouHeVelocityBoundary function on the superLattice domain.
Definition at line 36 of file setZouHeVelocityBoundary3D.hh.
References olb::SuperGeometry< T, D >::getMaterialIndicator().
Here is the call graph for this function:| olb::SuperCommunicator | ( | SUPER & | ) | -> SuperCommunicator< typename SUPER::value_t, SUPER > |
| olb::SuperLatticeCoupling | ( | COUPLER | , |
| MAP && | ... ) -> SuperLatticeCoupling< COUPLER, typename meta::map< MAP... >::template map_values< descriptors::extract_valued_descriptor_t > > |
| olb::SuperLatticeDiscreteNormal2D | ( | SuperLattice< T, DESCRIPTOR > & | , |
| SuperGeometry< typename SuperLattice< T, DESCRIPTOR >::value_t, 2 > & | , | ||
| FunctorPtr< SuperIndicatorF2D< typename SuperLattice< T, DESCRIPTOR >::value_t > > && | ) -> SuperLatticeDiscreteNormal2D< T, DESCRIPTOR > |
| olb::SuperLatticeDiscreteNormalType2D | ( | SuperLattice< T, DESCRIPTOR > & | , |
| SuperGeometry< typename SuperLattice< T, DESCRIPTOR >::value_t, 2 > & | , | ||
| FunctorPtr< SuperIndicatorF2D< typename SuperLattice< T, DESCRIPTOR >::value_t > > && | ) -> SuperLatticeDiscreteNormalType2D< T, DESCRIPTOR > |
| olb::SuperLatticePhysPressure2D | ( | SuperLattice< T, DESCRIPTOR > & | , |
| const UnitConverter< T, DESCRIPTOR > & | ) -> SuperLatticePhysPressure2D< T, DESCRIPTOR > |
| olb::SuperLatticePhysPressure3D | ( | SuperLattice< T, DESCRIPTOR > & | , |
| const UnitConverter< T, DESCRIPTOR > & | ) -> SuperLatticePhysPressure3D< T, DESCRIPTOR > |
| olb::SuperLatticePhysVelocity2D | ( | SuperLattice< T, DESCRIPTOR > & | , |
| const UnitConverter< T, DESCRIPTOR > & | ) -> SuperLatticePhysVelocity2D< T, DESCRIPTOR > |
| olb::SuperLatticePhysVelocity3D | ( | SuperLattice< T, DESCRIPTOR > & | , |
| const UnitConverter< T, DESCRIPTOR > & | , | ||
| bool | ) -> SuperLatticePhysVelocity3D< T, DESCRIPTOR > |
| std::array< double, q > olb::testAnisotropyConservationColumn | ( | const std::array< std::array< double, q >, q > & | phi, |
| const double | weights[q], | ||
| std::array< std::array< double, q >, q > & | cosTheta ) |
Definition at line 90 of file anisoDiscr.h.
| std::array< double, q > olb::testEnergyConservationColumn | ( | const std::array< std::array< double, q >, q > & | phi | ) |
Definition at line 62 of file anisoDiscr.h.
| std::array< double, q > olb::testEnergyConservationRow | ( | const std::array< std::array< double, q >, q > & | phi | ) |
Definition at line 76 of file anisoDiscr.h.
|
constexpr |
Copies data into a standard vector.
Definition at line 88 of file scalarVector.h.
| void olb::writeArrayData | ( | std::string | fullFileName, |
| std::string | headLine, | ||
| std::vector< ARRAYTYPE > & | dataVector ) |
Write array data.
Definition at line 122 of file plainWriter.hh.
References olb::singleton::mpi(), and writeScalarData().
Here is the call graph for this function:| void olb::writeArrayData | ( | std::string | fullFileName, |
| std::string | headLine, | ||
| std::vector< std::string > & | dataVector ) |
Write array data.
Definition at line 98 of file plainWriter.hh.
References olb::singleton::mpi().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::writeArrayData | ( | std::string | fullFileName, |
| std::vector< std::string > & | headLineVector, | ||
| std::vector< ARRAYTYPE > & | dataVector ) |
Write array data (including sanity check)
Definition at line 144 of file plainWriter.hh.
References olb::singleton::mpi(), and writeArrayData().
Here is the call graph for this function:| void olb::writeScalarData | ( | std::ofstream & | dataWriterOpened, |
| std::string | fullFileName, | ||
| std::string | headLine, | ||
| ARRAYTYPE & | dataVector, | ||
| int | iE, | ||
| int | iE0 = 0 ) |
Write functions for scalar and array data.
Definition at line 32 of file plainWriter.hh.
Here is the caller graph for this function:| void olb::writeScalarData | ( | std::string | fullFileName, |
| std::string | headLine, | ||
| ARRAYTYPE & | dataVector, | ||
| int | iE, | ||
| int | iE0 = 0 ) |
Write scalar data.
Definition at line 50 of file plainWriter.hh.
References olb::singleton::mpi(), and writeScalarData().
Here is the call graph for this function:| void olb::writeScalarData | ( | std::string | fullFileName, |
| std::vector< std::string > & | headLineVector, | ||
| ARRAYTYPE & | dataVector, | ||
| int | iT, | ||
| int | iTinit = 0 ) |
Write scalar data (including sanity check)
Definition at line 71 of file plainWriter.hh.
References olb::singleton::mpi(), and writeScalarData().
Here is the call graph for this function:| bool olb::XMLreader::read< std::size_t > | ( | std::size_t & | value, |
| bool | verboseOn, | ||
| bool | exitIfMissing ) const |
Definition at line 465 of file xmlReader.h.
| bool olb::XMLreader::read< std::string > | ( | std::string & | entry, |
| bool | verboseOn, | ||
| bool | exitIfMissing ) const |
Definition at line 523 of file xmlReader.h.
| std::function< T(const std::vector< T > &, unsigned) olb::getCallable) (std::shared_ptr< SOLVER > solver) | ( | std::shared_ptr< SOLVER > | solver | ) |
Returns a function that encapsulates the solving process.
Definition at line 317 of file lbSolver.h.