|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
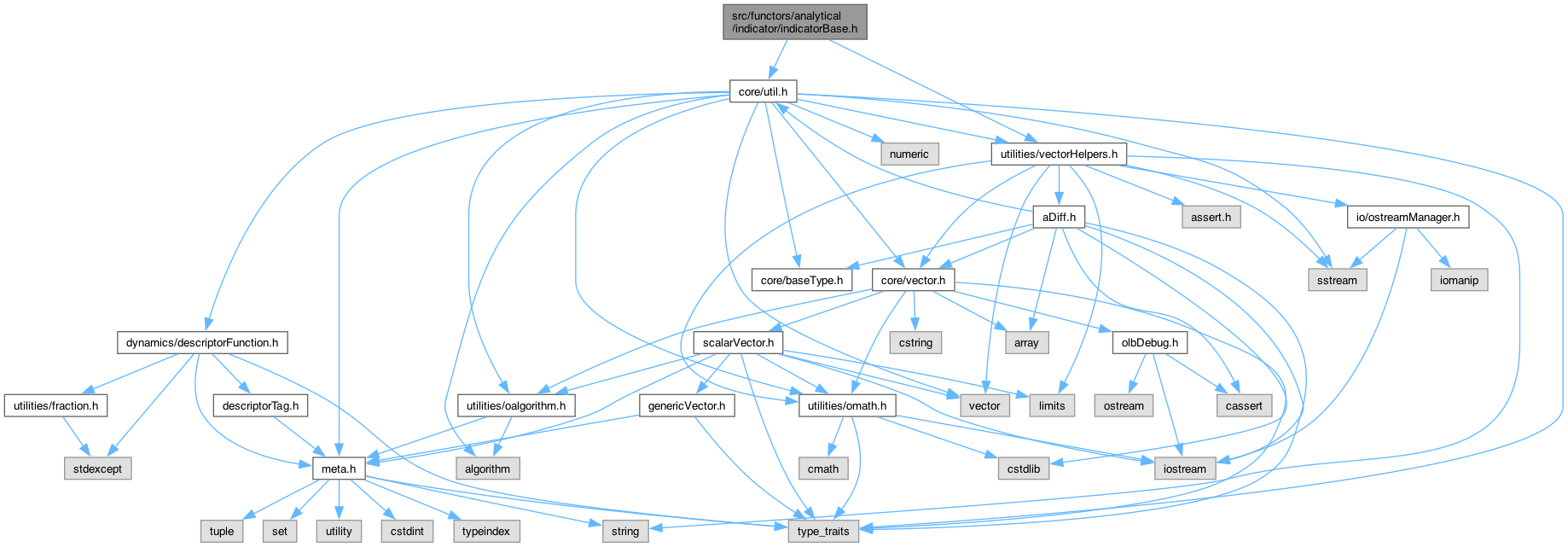
 Include dependency graph for indicatorBase.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for indicatorBase.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Namespaces | |
| namespace | olb |
| Top level namespace for all of OpenLB. | |
| namespace | olb::util |
Functions | |
| template<typename S , unsigned D, typename F1 , typename F2 > | |
| bool | olb::util::distance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S precision, S pitch, F1 isInside, F2 isInsideBoundingBox) |
| template<typename S , unsigned D, typename F1 , typename F2 > | |
| bool | olb::util::distance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S precision, F1 sdf, F2 isInsideBoundingBox, const unsigned maxIt=1e6) |
| template<typename S , unsigned D, bool normalizeDirection = true> | |
| bool | olb::util::distance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S precision, std::function< S(const Vector< S, D > &)> sdf, S maxDistance, const unsigned maxIt=1e6) |
| template<typename S , unsigned D, typename F1 , typename F2 > | |
| bool | olb::util::bisectDistance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S pitch, S precision, F1 isInside, F2 isInsideBoundingBox) |
| Using a bisect to find the unsigned distance (false if distance was not found, true if distance was found) | |
| template<typename S , unsigned D, typename F1 > | |
| Vector< S, D > | olb::util::surfaceNormal (const Vector< S, D > &pos, const S meshSize, F1 sdf) |