|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
Namespaces | |
| namespace | tensorIndices2D |
| namespace | tensorIndices3D |
Classes | |
| class | ADf |
| Definition of a description of a algoritmic differentiation data type using the forward method. More... | |
| struct | BaseTypeHelper |
| struct | BaseTypeHelper< double > |
| struct | BaseTypeHelper< float > |
| struct | BaseTypeHelper< int > |
| struct | BaseTypeHelper< long double > |
| class | BisectStepper |
| Propose successive test values of a scalar (e.g. Re) to check stability of a system. More... | |
| class | CircularBuffer |
| Simple circular buffer to compute average and other quantities over pre-defined temporal windows. More... | |
| struct | ContainerCreator |
| Creates a container of type C. More... | |
| struct | ContainerCreator< std::array< T, SIZE > > |
| struct | ContainerCreator< std::vector< T > > |
| struct | ContainerCreator< Vector< T, SIZE > > |
| struct | divides |
| Wrapper of function object std::divides. More... | |
| class | ExponentialMovingAverage |
| Exponential moving average. More... | |
| struct | has_identity_functor |
| Indicates existence of F::identity_functor_type typedef. More... | |
| struct | has_identity_functor< F, std::void_t< typename F::identity_functor_type > > |
| Indicates existence of F::identity_functor_type typedef. More... | |
| struct | is_adf |
| struct | is_adf< ADf< S, DIM > > |
| class | KahanSummator |
| Accurate summation of floating point numbers with the Kahan algorithm Reduces round-off effects which arise if the total sum is significantly larger than the single summands. More... | |
| struct | maxOp |
| Wrapper function object for util::max. More... | |
| struct | maxOp< void > |
| struct | minOp |
| Wrapper function object for util::min. More... | |
| struct | minOp< void > |
| struct | minus |
| Wrapper of function object std::minus with special handling for bool. More... | |
| struct | multiplies |
| Wrapper of function object std::multiplies. More... | |
| class | Newton1D |
| 1D Newton simple scheme More... | |
| struct | plus |
| Wrapper of function object std::plus. More... | |
| struct | power |
| Power function object. More... | |
| class | Randomizer |
| struct | TensorVal |
| Compute number of elements of a symmetric d-dimensional tensor. More... | |
| class | TimeIntegrator |
| Integration with the trapezoid rule. More... | |
| class | TimeIntegratorsArray |
| Helper class that manages an array of time integrators. More... | |
| class | Timer |
| How to use in Code: More... | |
| class | TrapezRuleInt1D |
| Trapezoidal rule. More... | |
| class | ValueTracer |
| Check time-convergence of a scalar. More... | |
Typedefs | |
| template<typename S > | |
| using | StdVector = std::vector<S,std::allocator<S>> |
Functions | |
| template<typename T > | |
| cpu::simd::Pack< T > | sqrt (cpu::simd::Pack< T > value) |
| template<typename T > | |
| cpu::simd::Pack< T > | fabs (cpu::simd::Pack< T > value) |
| template<typename T > | |
| cpu::simd::Pack< T > | pow (cpu::simd::Pack< T > base, cpu::simd::Pack< T > exp) |
| template<typename T , typename S > | |
| cpu::simd::Pack< T > | pow (cpu::simd::Pack< T > base, S exp) |
| template<typename T > | |
| cpu::simd::Pack< T > | min (cpu::simd::Pack< T > rhs, cpu::simd::Pack< T > lhs) |
| template<typename T > | |
| cpu::simd::Pack< T > | max (cpu::simd::Pack< T > rhs, cpu::simd::Pack< T > lhs) |
| template<typename T > | |
| T | norm (const std::vector< T > &a) |
| l2 norm of a vector of arbitrary length | |
| template<typename T > | |
| int | sign (T val) |
| template<typename T > | |
| bool | aligned_to_x (const std::vector< T > &vec) |
| template<typename T > | |
| bool | aligned_to_y (const std::vector< T > &vec) |
| template<typename T > | |
| bool | aligned_to_z (const std::vector< T > &vec) |
| template<typename T > | |
| bool | aligned_to_grid (const std::vector< T > &vec) |
| bool | intersect (int x0, int x1, int y0, int y1, int x0_, int x1_, int y0_, int y1_, int &newX0, int &newX1, int &newY0, int &newY1) |
| bool | intersect (int x0, int x1, int y0, int y1, int z0, int z1, int x0_, int x1_, int y0_, int y1_, int z0_, int z1_, int &newX0, int &newX1, int &newY0, int &newY1, int &newZ0, int &newZ1) |
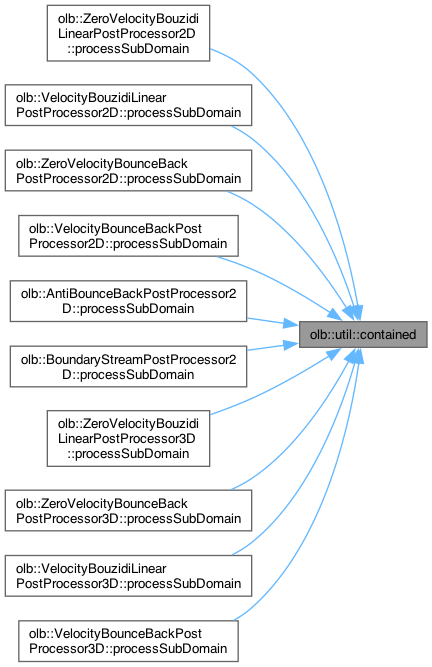
| bool | contained (int x, int y, int x0, int x1, int y0, int y1) |
| bool | contained (int x, int y, int z, int x0, int x1, int y0, int y1, int z0, int z1) |
| template<typename T > | |
| T | sqr (T arg) |
| template<typename ARRAY_LIKE , unsigned D> | |
| auto | normSqr (const ARRAY_LIKE &u) any_platform |
| Compute norm square of a d-dimensional vector. | |
| template<unsigned D, typename ARRAY_LIKE > | |
| auto | norm (const ARRAY_LIKE &u) |
| template<typename T , unsigned D> | |
| T | normSqr (const T *u) any_platform |
| template<typename T > | |
| T | normSqr (std::initializer_list< T > data) |
| template<typename T , unsigned D, typename IMPL > | |
| T | normSqr (const ScalarVector< T, D, IMPL > &u) any_platform |
| Compute norm square of a d-dimensional vector. | |
| template<typename T , int d> | |
| T | scalarProduct (const T u1[d], const T u2[d]) |
| template<typename T > | |
| T | scalarProduct (const std::vector< T > &u1, const std::vector< T > &u2) |
| template<typename DESCRIPTOR , unsigned iVel, int value> | |
| constexpr auto | populationsContributingToVelocity () any_platform |
| Return array of population indices where c[iVel] == value. | |
| template<typename DESCRIPTOR , int... NORMAL> | |
| constexpr auto | populationsContributingToDirection () any_platform |
| Return array of population indices where c[iPop][iD] == NORMAL[iD]. | |
| template<typename DESCRIPTORBASE > | |
| int | findVelocity (const int v[DESCRIPTORBASE::d]) any_platform |
| template<typename DESCRIPTOR , int direction, int orientation> | |
| constexpr auto | subIndexOutgoing () any_platform |
| Compute opposites of wall-incoming population indices. | |
| template<typename DESCRIPTOR , int direction, int orientation> | |
| constexpr auto | subIndexOutgoingRemaining () any_platform |
| template<typename DESCRIPTOR , int plane, int normal1, int normal2> | |
| constexpr auto | subIndexOutgoing3DonEdges () any_platform |
| template<typename DESCRIPTOR , int normalX, int normalY> | |
| constexpr auto | subIndexOutgoing2DonCorners () any_platform |
| template<typename DESCRIPTOR , int normalX, int normalY, int normalZ> | |
| constexpr auto | subIndexOutgoing3DonCorners () any_platform |
| template<typename DESCRIPTORBASE > | |
| std::vector< int > | remainingIndexes (const std::vector< int > &indices) |
| finds all the remaining indexes of a lattice given some other indexes | |
| template<typename T , typename DESCRIPTOR > | |
| int | get_nearest_link (const std::vector< T > &vec) |
| Util Function for Wall Model of Malaspinas get link with smallest angle to a vector. | |
| template<typename T , typename DESCRIPTOR > | |
| T | densityFromPressure (T latticePressure) |
| compute lattice density from lattice pressure | |
| template<typename T , typename DESCRIPTOR > | |
| T | pressureFromDensity (T latticeDensity) |
| compute lattice pressure from lattice density | |
| template<typename S , unsigned D, typename F1 , typename F2 > | |
| bool | distance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S precision, S pitch, F1 isInside, F2 isInsideBoundingBox) |
| template<typename S , unsigned D, typename F1 , typename F2 > | |
| bool | distance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S precision, F1 sdf, F2 isInsideBoundingBox, const unsigned maxIt=1e6) |
| template<typename S , unsigned D, bool normalizeDirection = true> | |
| bool | distance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S precision, std::function< S(const Vector< S, D > &)> sdf, S maxDistance, const unsigned maxIt=1e6) |
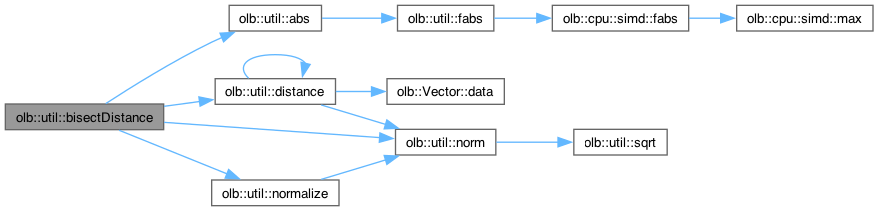
| template<typename S , unsigned D, typename F1 , typename F2 > | |
| bool | bisectDistance (S &distance, const Vector< S, D > &origin, const Vector< S, D > &direction, S pitch, S precision, F1 isInside, F2 isInsideBoundingBox) |
| Using a bisect to find the unsigned distance (false if distance was not found, true if distance was found) | |
| template<typename S , unsigned D, typename F1 > | |
| Vector< S, D > | surfaceNormal (const Vector< S, D > &pos, const S meshSize, F1 sdf) |
| template<typename SAD > | |
| void | iniDiagonal (SAD *a, int dim) |
| The variables of an array are set to be the differential variables. | |
| template<typename C > | |
| void | iniDiagonal (C &a) |
| template<typename T , typename TAD > | |
| void | copyDerivatives (T *target, const TAD *source, int length) |
| Copy the derivatives from an ADf array into an array. | |
| template<typename T , typename S , template< typename > typename C> | |
| C< T > | copyAs (const C< S > &input) |
| copy vector with specified typecast | |
| template<typename S > | |
| ADf< S, 1 > | iniAD (const S source) |
| copy value and initialize derivative | |
| template<unsigned n, typename S > | |
| ADf< S, n > * | iniAD (const S *source) |
| copy array values and initialize derivatives | |
| template<unsigned n, typename S , template< typename > typename C> | |
| C< ADf< S, n > > | iniAD (const C< S > &source) |
| copy values and initialize derivatives | |
| template<typename S , typename F > | |
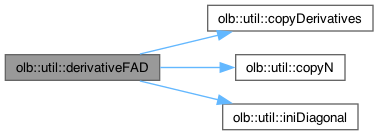
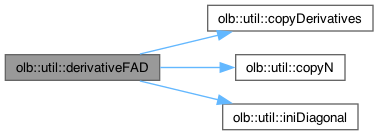
| auto | derivativeFAD (F f, const S input) |
| Compute derivatives of a function f: S -> T via forward AD Signature is "V f(U)" so f is expected to accept and return a single value. | |
| template<unsigned sourceDIM, typename S , typename F > | |
| auto | derivativeFAD (F f, const S *input) |
| Compute derivatives of a function f: S^sourceDIM -> T via forward AD Signature is "V f(U*)" so f is expected to return a single value. | |
| template<unsigned sourceDIM, typename T , typename S , typename F > | |
| void | derivativeFAD (F f, T *output, const S *input, unsigned targetDIM) |
| Compute derivatives of a function f: S^sourceDIM -> T^targetDIM via forward AD Signature of f is "void f(V*, U*)", it is expected to modify the first argument in-place. | |
| template<class T , unsigned DIM> | |
| std::ostream & | operator<< (std::ostream &os, const ADf< T, DIM > &o) |
| template<class T , unsigned DIM> | |
| std::istream & | operator>> (std::istream &is, ADf< T, DIM > &in) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator+ (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator+ (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | operator+ (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator- (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator- (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | operator- (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator* (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator* (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | operator* (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator/ (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr ADf< T, DIM > | operator/ (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | operator/ (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | operator+ (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | operator- (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| ADf< T, DIM > | pow (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| ADf< T, DIM > | pow (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | pow (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | pow (const ADf< T, DIM > &a, int b) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | sqr (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | exp (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | expf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | expl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | log (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | logf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | logl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | log10 (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | log10f (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | log10l (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | log2 (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | log2f (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | log2l (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | log1p (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | log1pf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | log1pl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | sqrt (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | sin (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | cos (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | tan (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | asin (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | acos (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | atan (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | atan2 (const T &y, const ADf< T, DIM > &x) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | atan2 (const ADf< T, DIM > &y, const T &x) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | atan2 (const ADf< T, DIM > &y, const ADf< T, DIM > &x) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | sinh (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | cosh (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | tanh (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | asinh (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | acosh (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | atanh (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | fmod (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| ADf< T, DIM > | fmod (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| ADf< T, DIM > | fmod (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr bool | operator== (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator== (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator== (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr bool | operator!= (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator!= (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator!= (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr bool | operator> (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator> (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator> (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr bool | operator>= (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator>= (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator>= (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr bool | operator< (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator< (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator< (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr bool | operator<= (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator<= (const ADf< T, DIM > &a, const U &b) |
| template<class T , unsigned DIM, typename U , typename std::enable_if< std::is_integral< U >::value|std::is_floating_point< U >::value, int >::type = 0> | |
| constexpr bool | operator<= (const U &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | floor (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | floorf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | floorl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | ceil (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | ceilf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | ceill (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | round (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | roundf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | roundl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | lround (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | lroundf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | lroundl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | llround (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | llroundf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | llroundl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | fabs (const ADf< T, DIM > &a) |
| template<unsigned DIM> | |
| ADf< float, DIM > | fabsf (const ADf< float, DIM > &a) |
| template<unsigned DIM> | |
| ADf< long double, DIM > | fabsl (const ADf< long double, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | abs (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | labs (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| ADf< T, DIM > | llabs (const ADf< T, DIM > &a) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | max (const olb::BaseType< ADf< T, DIM > > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | max (const ADf< T, DIM > &a, const olb::BaseType< ADf< T, DIM > > &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | max (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | min (const olb::BaseType< ADf< T, DIM > > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | min (const ADf< T, DIM > &a, const olb::BaseType< ADf< T, DIM > > &b) |
| template<class T , unsigned DIM> | |
| constexpr ADf< T, DIM > | min (const ADf< T, DIM > &a, const ADf< T, DIM > &b) |
| template<class T , unsigned DIM> | |
| bool | nearZero (const ADf< T, DIM > &a) |
| template<typename T > | |
| constexpr void | throwADfException (T arg) |
| template<typename T , typename S > | |
| auto | fmod_pos (T a, S b) |
| Variant of fmod (floating point modulo) that always returns positive values. | |
| Expr | sqrt (Expr x) |
| Expr | fabs (Expr x) |
| Expr | pow (Expr base, Expr exp) |
| Expr | exp (Expr x) |
| template<typename T , unsigned D> | |
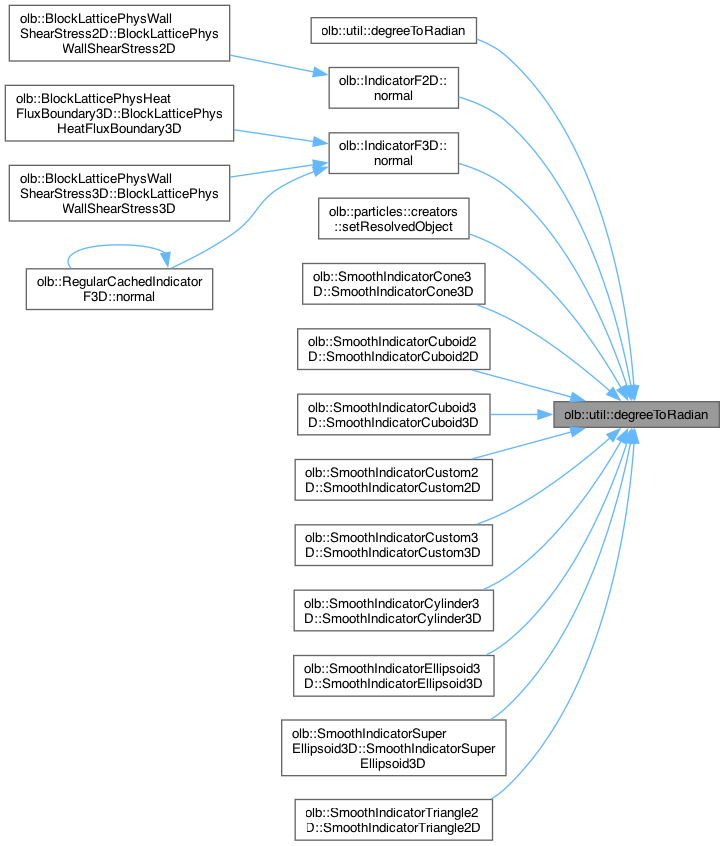
| decltype(Vector< decltype(util::sqrt(T())), D >()) | degreeToRadian (const Vector< T, D > &angle) |
| template<typename T > | |
| decltype(util::sqrt(T())) | degreeToRadian (T angle) |
| template<typename T , unsigned D> | |
| decltype(Vector< decltype(util::sqrt(T())), D >()) | radianToDegree (const Vector< T, D > &angle) |
| template<typename T > | |
| decltype(util::sqrt(T())) | radianToDegree (T angle) |
| template<typename T , unsigned D> | |
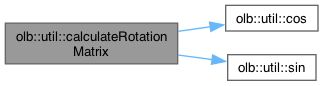
| Vector< T, utilities::dimensions::convert< D >::matrix > | calculateRotationMatrix (const Vector< T, utilities::dimensions::convert< D >::rotation > &angle) |
| template<typename T , unsigned D> | |
| Vector< T, utilities::dimensions::convert< D >::matrix > | invertRotationMatrix (const Vector< T, utilities::dimensions::convert< D >::matrix > &rotationMatrix) |
| template<typename T , unsigned D> | |
| Vector< T, utilities::dimensions::convert< D >::matrix > | calculateInverseRotationMatrix (const Vector< T, utilities::dimensions::convert< D >::rotation > &angle) |
| template<typename T , unsigned D, bool OUTPUT_USES_ROTATION_CENTER_AS_ORIGIN = false> | |
| Vector< T, D > | executeRotation (const Vector< T, D > &input, const Vector< T, utilities::dimensions::convert< D >::matrix > &rotationMatrix, const Vector< T, D > &rotationCenter=Vector< T, D >(0.)) |
| Rotates the input around the rotationCenter with a given rotationMatrix. | |
| template<typename T , unsigned D, bool OUTPUT_USES_ROTATION_CENTER_AS_ORIGIN = false> | |
| Vector< T, D > | invertRotation (const Vector< T, D > &input, const Vector< T, utilities::dimensions::convert< D >::matrix > &rotationMatrix, const Vector< T, D > &rotationCenter=Vector< T, D >(0.)) |
| Rotates the input around the rotationCenter with a given rotationMatrix in the opposite direction. | |
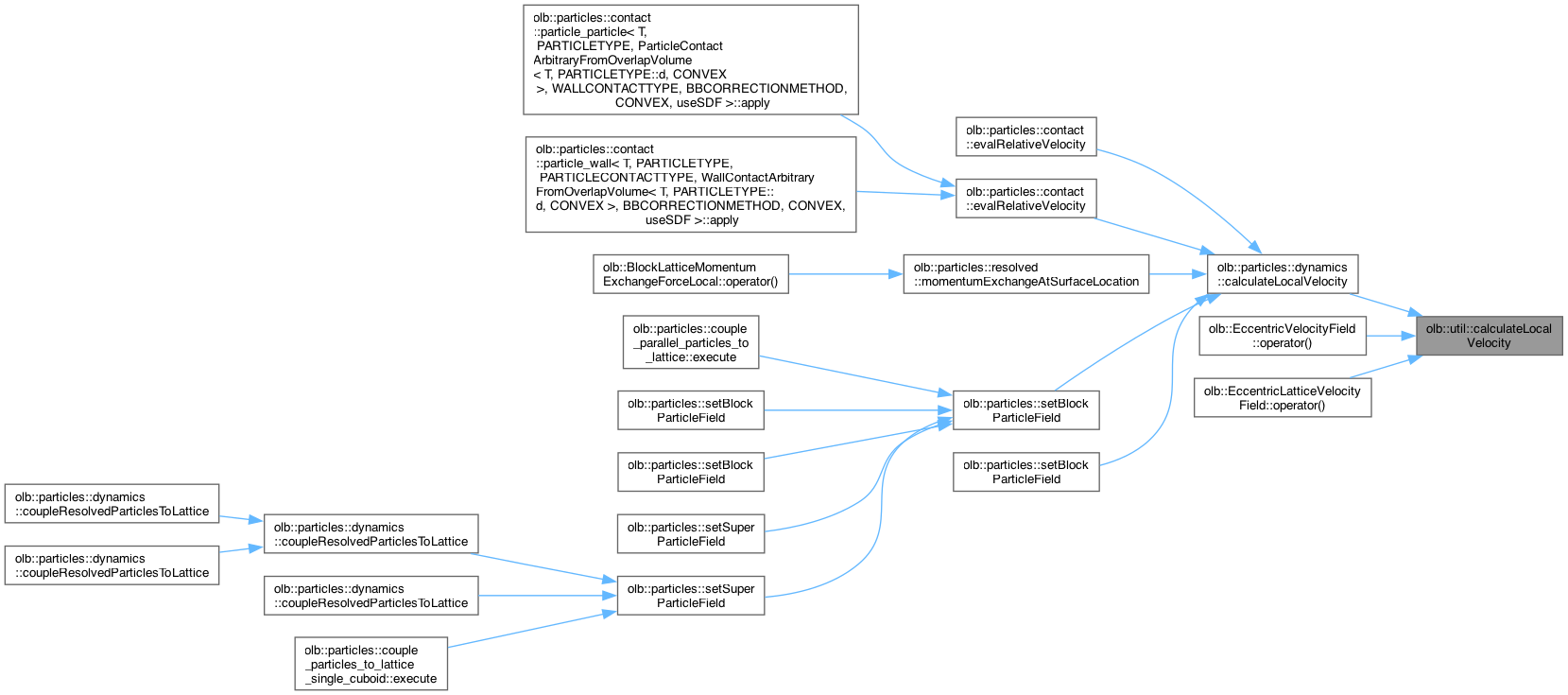
| template<typename T , unsigned D> | |
| constexpr Vector< T, D > | calculateLocalVelocity (const Vector< T, D > &rotationCenter, const Vector< T, D > &velocity, const Vector< T, utilities::dimensions::convert< D >::rotation > &angularVelocity, const Vector< T, D > &position) |
| Calculate local velocity. | |
| template<typename T > | |
| constexpr Matrix< T, 3, 3 > | rotateMofi (const Vector< T, 3 > &mofi, const Vector< T, 9 > &rotationMatrix) |
| Rotate moment of inertia (mofi) | |
| template<typename T > | |
| int | evaluateIntegration (std::vector< T > &testValues, bool print=false) |
| template<typename T > | |
| T | euklidN2 (const T x[], int dim) |
| Squared Euclidean norm of an array. | |
| template<typename T > | |
| T | euklidDistance2 (const T x[], const T y[], int dim) |
| Squared Euclidean distance between two arrays. | |
| template<typename T > | |
| T | euklidN (const T x[], int dim) |
| Euclidean norm of an array. | |
| template<typename T > | |
| T | euklidDistance (const T x[], const T y[], int dim) |
| Euclidean distance between two arrays. | |
| template<typename C > | |
| auto | euklidN2 (const C &x) |
| Squared Euclidean norm for Container-type array. | |
| template<typename C > | |
| auto | euklidDistance2 (const C &x, const C &y) |
| Squared Euclidean distance for Container-type array. | |
| template<typename C > | |
| auto | euklidN (const C &x) |
| Euclidean norm for Container-type array. | |
| template<typename C > | |
| auto | euklidDistance (const C &x, const C &y) |
| Euclidean distance for Container-type array. | |
| template<typename T > | |
| constexpr T | max (T a, meta::id_t< T > b) |
| template<typename T , class Compare > | |
| constexpr T | max (T a, meta::id_t< T > b, Compare comp) |
| template<typename T > | |
| constexpr T | max (std::initializer_list< T > ilist) |
| template<typename T , class Compare > | |
| constexpr T | max (std::initializer_list< T > ilist, Compare comp) |
| template<> | |
| float | max< float > (float x, float y) any_platform |
| template<> | |
| double | max< double > (double x, double y) any_platform |
| template<typename T > | |
| constexpr T | min (T a, meta::id_t< T > b) |
| template<typename T , class Compare > | |
| constexpr T | min (T a, meta::id_t< T > b, Compare comp) |
| template<typename T > | |
| constexpr T | min (std::initializer_list< T > ilist) |
| template<typename T , class Compare > | |
| constexpr T | min (std::initializer_list< T > ilist, Compare comp) |
| template<> | |
| float | min< float > (float x, float y) any_platform |
| template<> | |
| double | min< double > (double x, double y) any_platform |
| template<typename T , typename S > | |
| any_platform auto | pow (T base, S exp) -> std::enable_if_t< std::is_arithmetic_v< T >, decltype(std::pow(base, exp))> |
| any_platform float | powf (float base, float exp) |
| long double | powl (long double base, long double exp) |
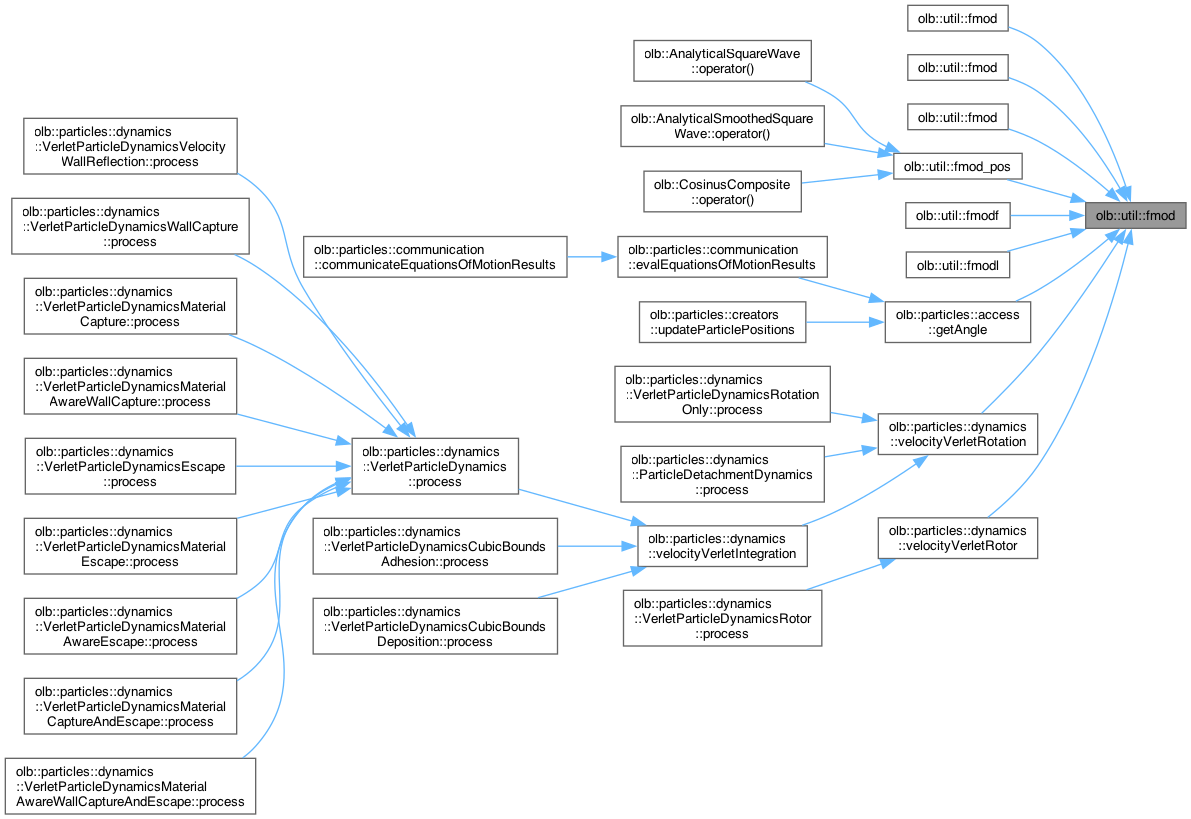
| float | fmod (float x, float y) |
| float | fmodf (float x, float y) |
| double | fmod (double x, double y) |
| long double | fmod (long double x, long double y) |
| long double | fmodl (long double x, long double y) |
| float | fmod (float x, int y) |
| double | fmod (double x, int y) |
| long double | fmod (long double x, int y) |
| template<typename T , typename S > | |
| auto | fmod (T x, S y) |
| template<typename T > | |
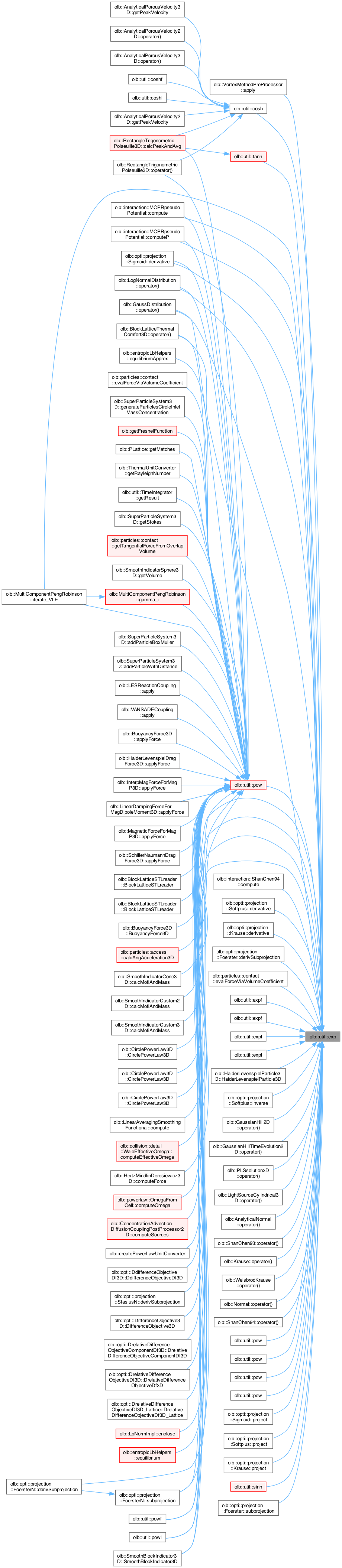
| std::enable_if_t< std::is_floating_point_v< T >, T > | exp (T arg) any_platform |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | exp (T arg) any_platform |
| float | expf (float arg) |
| long double | expl (long double arg) |
| float | log (float arg) |
| float | logf (float arg) |
| double | log (double arg) |
| long double | log (long double arg) |
| long double | logl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | log (T arg) |
| float | log10 (float arg) |
| float | log10f (float arg) |
| double | log10 (double arg) |
| long double | log10 (long double arg) |
| long double | log10l (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | log10 (T arg) |
| float | log2 (float arg) |
| float | log2f (float arg) |
| double | log2 (double arg) |
| long double | log2 (long double arg) |
| long double | log2l (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | log2 (T arg) |
| float | log1p (float arg) |
| float | log1pf (float arg) |
| double | log1p (double arg) |
| long double | log1p (long double arg) |
| long double | log1pl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | log1p (T arg) |
| any_platform float | sqrtf (float arg) |
| long double | sqrtl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_floating_point_v< T >, T > | sqrt (T arg) any_platform |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | sqrt (T arg) any_platform |
| float | sin (float arg) |
| float | sinf (float arg) |
| double | sin (double arg) |
| long double | sin (long double arg) |
| long double | sinl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | sin (T arg) |
| float | sinh (float arg) |
| float | sinhf (float arg) |
| double | sinh (double arg) |
| long double | sinh (long double arg) |
| long double | sinhl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | sinh (T arg) |
| float | cos (float arg) |
| float | cosf (float arg) |
| double | cos (double arg) |
| long double | cos (long double arg) |
| long double | cosl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | cos (T arg) |
| float | cosh (float arg) |
| float | coshf (float arg) |
| double | cosh (double arg) |
| long double | cosh (long double arg) |
| long double | coshl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | cosh (T arg) |
| float | tan (float arg) |
| float | tanf (float arg) |
| double | tan (double arg) |
| long double | tan (long double arg) |
| long double | tanl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | tan (T arg) |
| float | tanh (float arg) |
| float | tanhf (float arg) |
| double | tanh (double arg) |
| long double | tanh (long double arg) |
| long double | tanhl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | tanh (T arg) |
| float | asin (float arg) |
| float | asinf (float arg) |
| double | asin (double arg) |
| long double | asin (long double arg) |
| long double | asinl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | asin (T arg) |
| float | asinh (float arg) |
| float | asinhf (float arg) |
| double | asinh (double arg) |
| long double | asinh (long double arg) |
| long double | asinhl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | asinh (T arg) |
| float | acos (float arg) |
| float | acosf (float arg) |
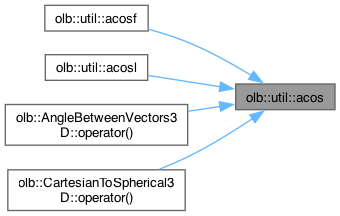
| double | acos (double arg) |
| long double | acos (long double arg) |
| long double | acosl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | acos (T arg) |
| float | acosh (float arg) |
| float | acoshf (float arg) |
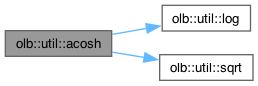
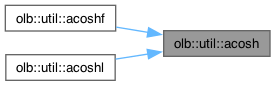
| double | acosh (double arg) |
| long double | acosh (long double arg) |
| long double | acoshl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | acosh (T arg) |
| float | atan (float arg) |
| float | atanf (float arg) |
| double | atan (double arg) |
| long double | atan (long double arg) |
| long double | atanl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | atan (T arg) |
| float | atan2 (float y, float x) |
| float | atan2f (float y, float x) |
| double | atan2 (double y, double x) |
| long double | atan2 (long double y, long double x) |
| long double | atan2l (long double y, long double x) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | atan2 (T y, T x) |
| float | atanh (float arg) |
| float | atanhf (float arg) |
| double | atanh (double arg) |
| long double | atanh (long double arg) |
| long double | atanhl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | atanh (T arg) |
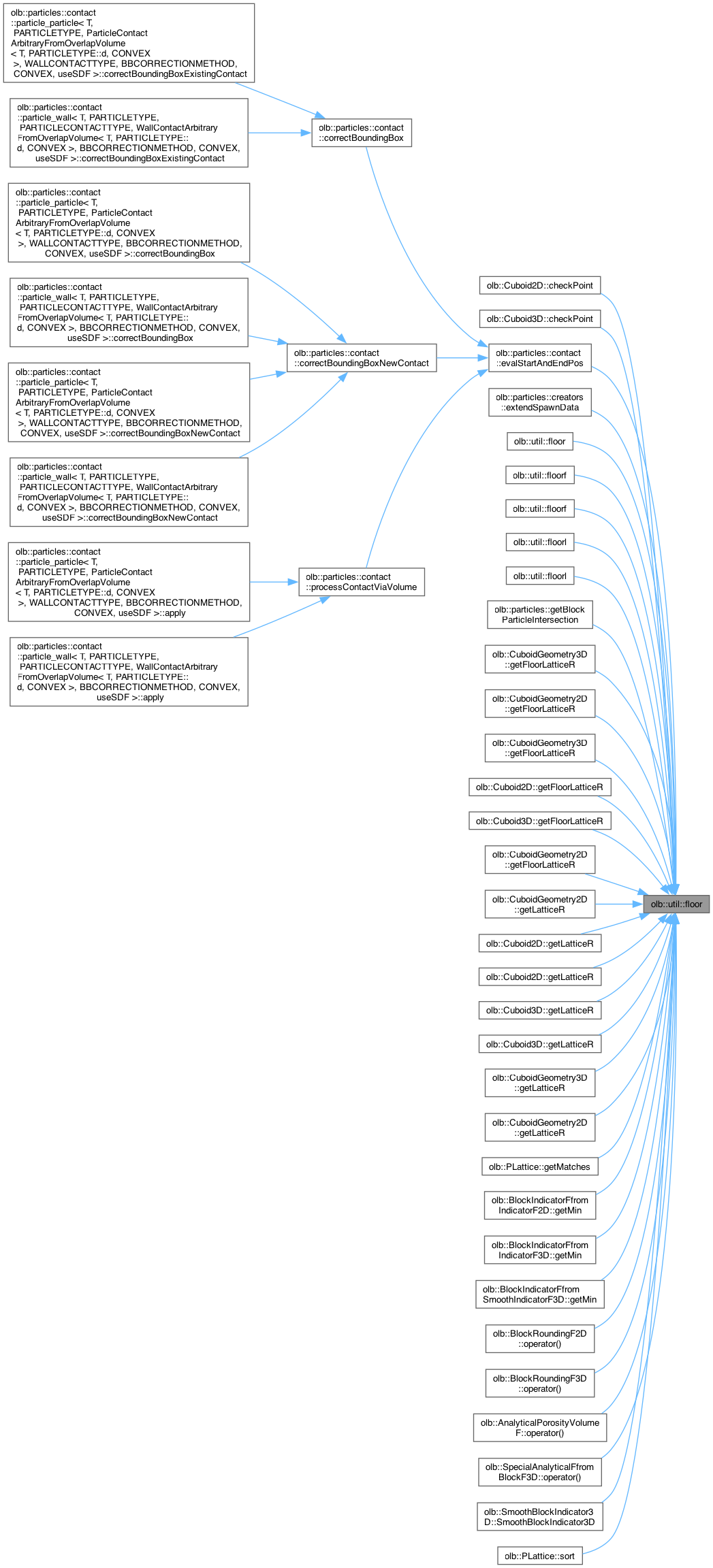
| float | floor (float arg) |
| double | floor (double arg) |
| long double | floor (long double arg) |
| float | floorf (float arg) |
| long double | floorl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | floor (T arg) |
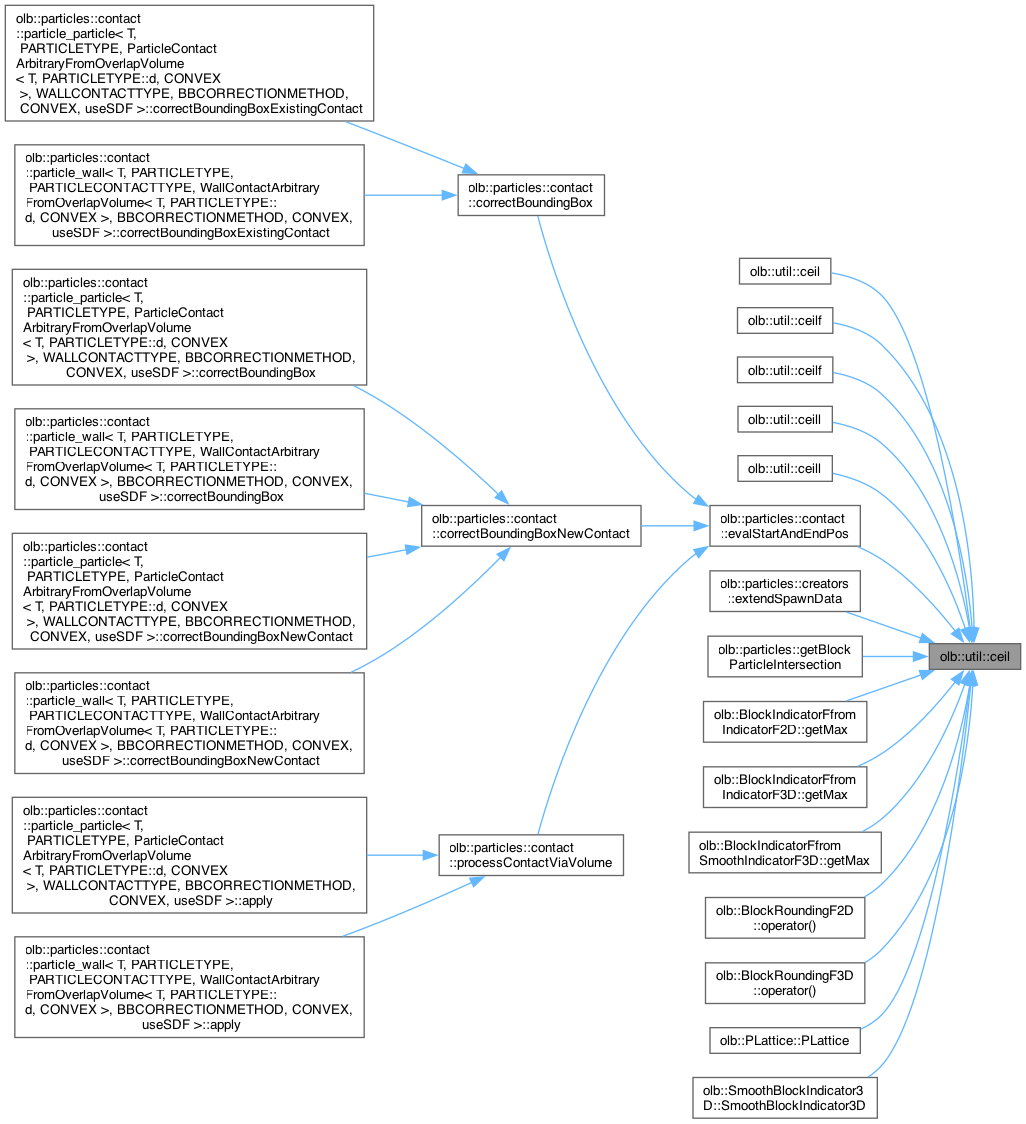
| float | ceil (float arg) |
| double | ceil (double arg) |
| long double | ceil (long double arg) |
| float | ceilf (float arg) |
| long double | ceill (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | ceil (T arg) |
| float | trunc (float arg) |
| float | truncf (float arg) |
| double | trunc (double arg) |
| long double | trunc (long double arg) |
| long double | truncl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | trunc (T arg) |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | round (T arg) |
| float | round (float arg) |
| double | round (double arg) |
| long double | round (long double arg) |
| float | roundf (float arg) |
| double | roundf (double arg) |
| long double | roundl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_arithmetic_v< T >, long > | lround (T arg) |
| long | lroundf (float arg) |
| long | lroundl (long double arg) |
| template<typename T > | |
| std::enable_if_t< std::is_arithmetic_v< T >, long long > | llround (T arg) |
| long long | llroundf (float arg) |
| long long | llroundl (long double arg) |
| template<typename T > | |
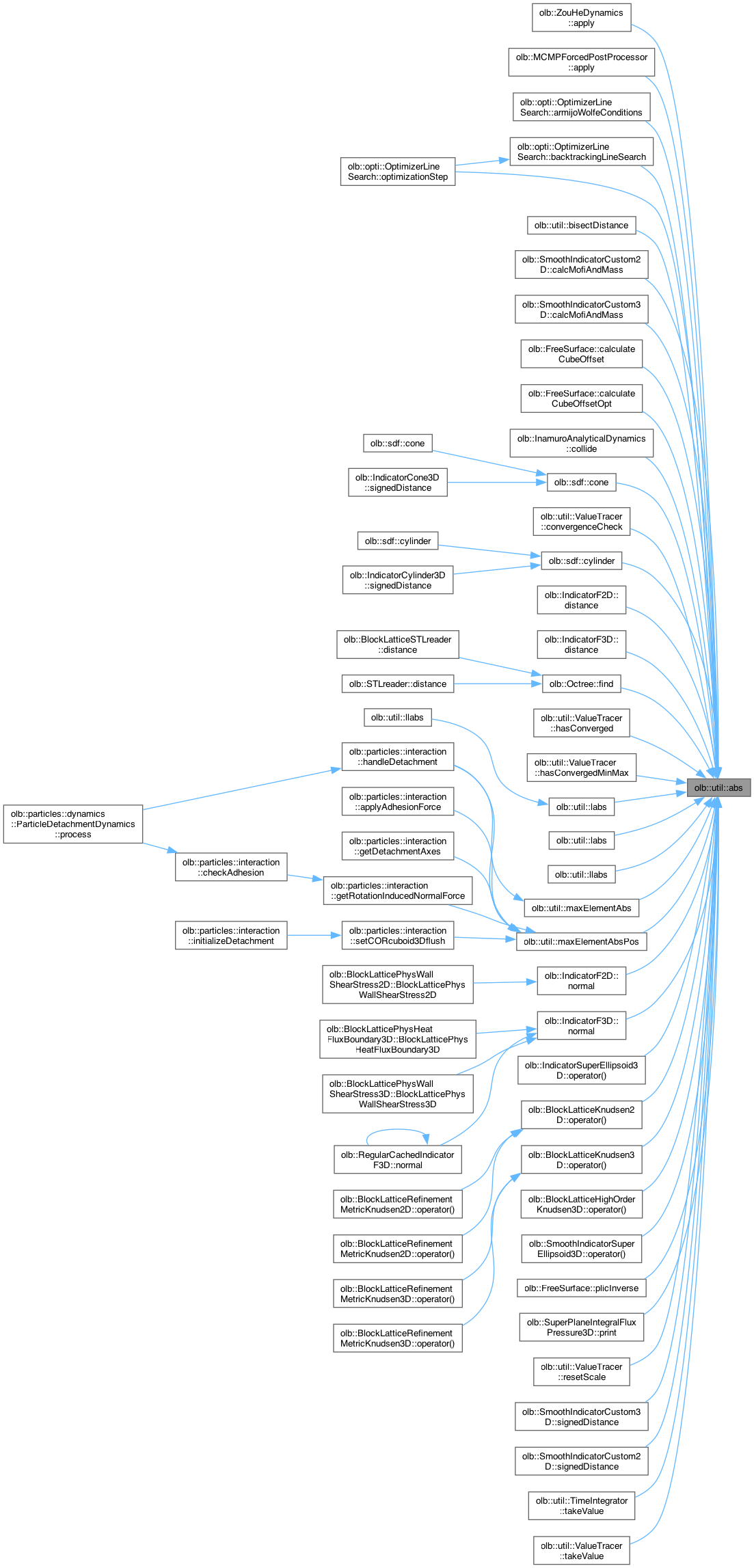
| std::enable_if_t< std::is_arithmetic_v< T >, T > | abs (T arg) any_platform |
| template<typename T > | |
| std::enable_if_t< std::is_floating_point_v< T >, T > | fabs (T arg) any_platform |
| template<typename T > | |
| std::enable_if_t< std::is_integral_v< T >, double > | fabs (T arg) any_platform |
| long | labs (long arg) |
| long long | llabs (long long arg) |
| float | fabsf (float arg) |
| long double | fabs (long double arg) |
| long double | fabsl (long double arg) |
| template<typename T , typename DESCRIPTOR > | |
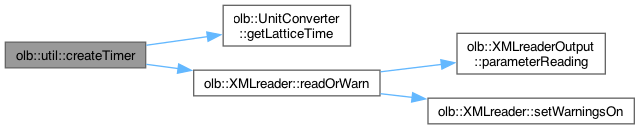
| Timer< T > * | createTimer (XMLreader ¶m, const UnitConverter< T, DESCRIPTOR > &converter, size_t numLatticePoints) |
| template<typename T > | |
| bool | nearZero (T a) |
| return true if a is close to zero | |
| template<typename T > | |
| bool | nearZero (T a, T epsilon) |
| template<typename T , typename U = T, typename W = T> | |
| bool | approxEqual (T a, U b, W epsilon) |
| template<typename T , typename U = T> | |
| bool | approxEqual (T a, U b) |
| template<class T > | |
| void | copyN (T c[], const T a[], const unsigned dim) any_platform |
| template<class S , class T > | |
| void | copyN (S c[], const T a[], const unsigned dim) any_platform |
| template<class T > | |
| void | copy3 (T c[], const T a[]) |
| template<typename T > | |
| std::vector< T > | fromVector3 (const Vector< T, 3 > &vec) |
| template<typename T > | |
| std::vector< T > | fromVector2 (const Vector< T, 2 > &vec) |
| template<typename T > | |
| T | norm2 (const std::vector< T > &a) |
| l2 norm to the power of 2 of a vector of arbitrary length | |
| template<typename T > | |
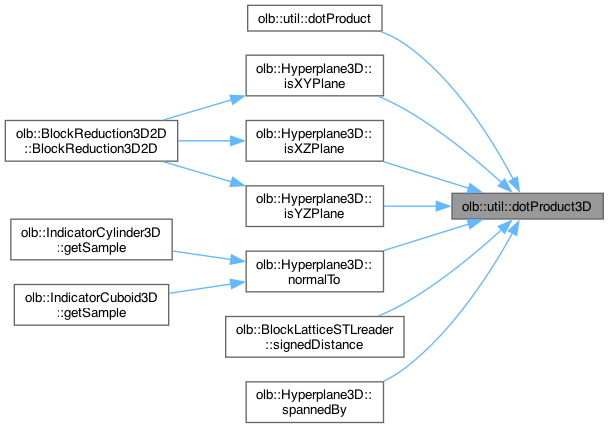
| T | dotProduct3D (const Vector< T, 3 > &a, const Vector< T, 3 > &b) |
| dot product, only valid in 3d | |
| template<typename T > | |
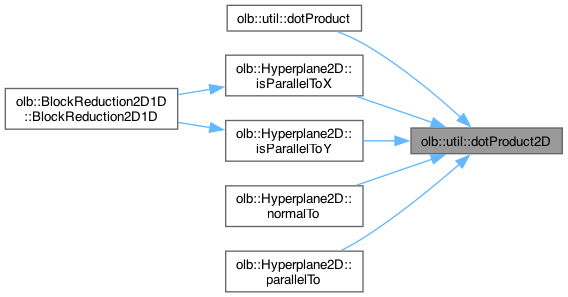
| T | dotProduct2D (const Vector< T, 2 > &a, const Vector< T, 2 > &b) |
| dot product, only valid in 2d | |
| template<typename T , unsigned D> | |
| T | dotProduct (const Vector< T, D > &a, const Vector< T, D > &b) |
| dot product | |
| template<typename T , unsigned D> | |
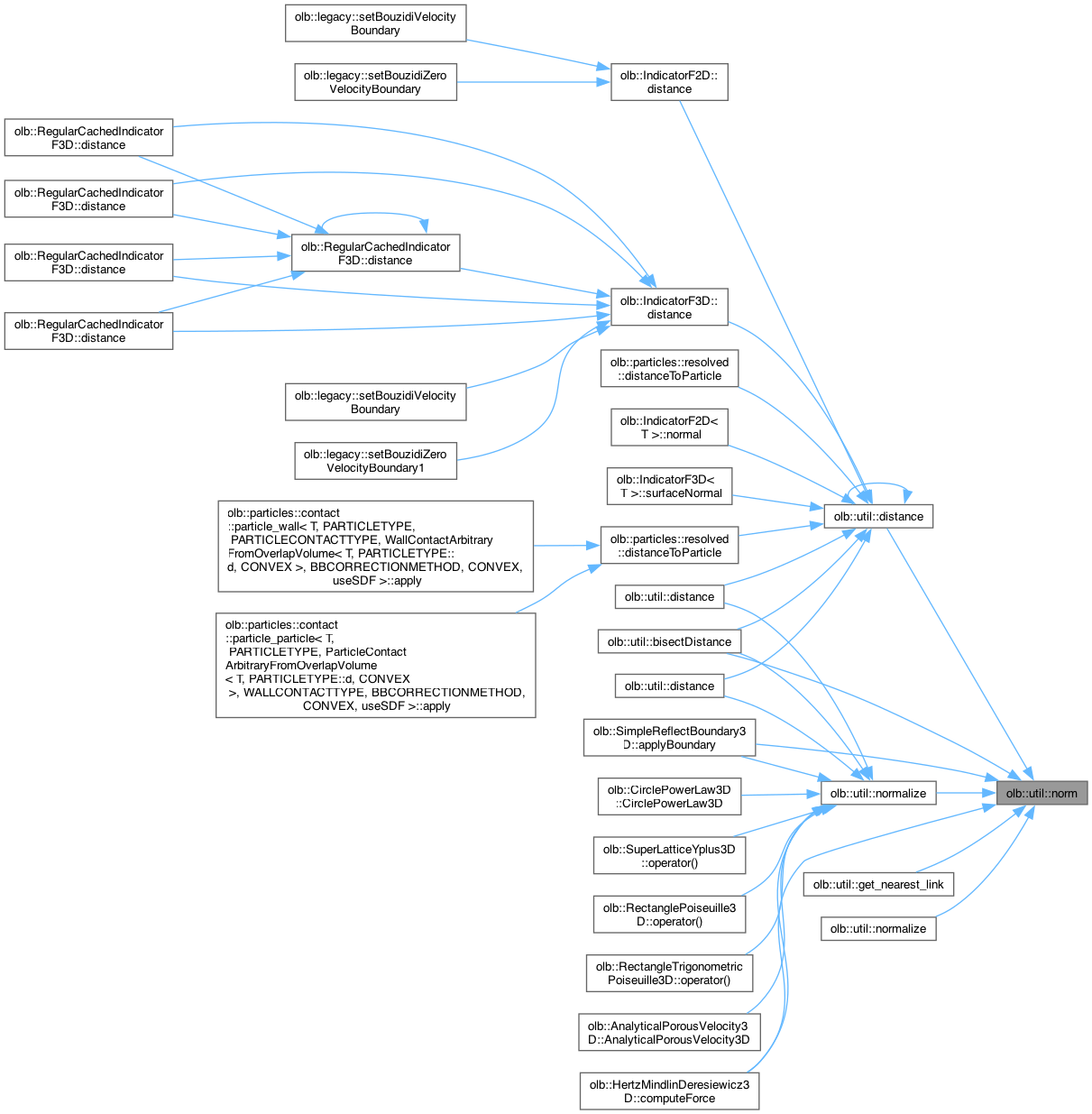
| Vector< T, D > | normalize (const Vector< T, D > &a) |
| template<typename T > | |
| std::vector< T > | normalize (const std::vector< T > &a) |
| returns a normalized vector, works for arbitrary lengths | |
| template<typename T , unsigned Size> | |
| Vector< T, Size > | floor (const Vector< T, Size > &a) |
| applies floor to each component of a vector | |
| template<typename T , unsigned Size> | |
| Vector< T, Size > | ceil (const Vector< T, Size > &a) |
| applies ceil to each component of a vector | |
| template<typename T , typename S , unsigned Size> | |
| Vector< T, Size > | fmod (const Vector< T, Size > &a, S b) |
| applies fmod to each component of a vector | |
| template<typename T , unsigned Size> | |
| T | average (const Vector< T, Size > &a) |
| computes the average of all elements | |
| template<typename T , unsigned Size> | |
| T | max_element (const Vector< T, Size > &a) |
| finds maximum element of all elements | |
| template<typename T , unsigned Size> | |
| T | min_element (const Vector< T, Size > &a) |
| finds minimum element of all elements | |
| template<typename T , unsigned Size> | |
| unsigned | maxElementPos (const Vector< T, Size > &a) |
| finds position of maximum element of all elements | |
| template<typename T , unsigned Size> | |
| unsigned | minElementPos (const Vector< T, Size > &a) |
| finds position of minimum element of all elements | |
| template<typename T , unsigned Size> | |
| T | maxElementAbs (const Vector< T, Size > &a) |
| finds maximum element of all absolute elements | |
| template<typename T , unsigned Size> | |
| unsigned | maxElementAbsPos (const Vector< T, Size > &a) |
| finds position of maximum element of all absolute elements | |
| template<typename T , bool ensureAngularBounds = true> | |
| T | angleBetweenVectors (const Vector< T, 2 > &a, const Vector< T, 2 > &b) |
| Calculates angles between two 2D vectors. | |
| template<typename T , bool ensureAngularBounds = true> | |
| Vector< T, 3 > | angleBetweenVectors (const Vector< T, 3 > &a, const Vector< T, 3 > &b) |
| Calculates angles between two 3D vectors. | |
| template<typename T > | |
| std::vector< T > | assign (T a, T b) |
| template<typename T > | |
| std::vector< T > | assign (T a, T b, T c) |
| template<typename U > | |
| void | print (U data, const std::string &name="", OstreamManager clout=OstreamManager(std::cout,"print"), const char delimiter=',') |
| template<typename C , typename U > | |
| bool | isContained (const C &c, U object) |
| Check, if object is contained in iteratable container c. | |
Variables | |
| template<class T > | |
| constexpr bool | is_adf_v = is_adf<T>::value |
| using olb::util::StdVector = std::vector<S,std::allocator<S>> |
Definition at line 49 of file vectorHelpers.h.
|
inline |
Definition at line 605 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
 Here is the caller graph for this function:
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 675 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v, log(), and sqrt().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| T olb::util::angleBetweenVectors | ( | const Vector< T, 2 > & | a, |
| const Vector< T, 2 > & | b ) |
Calculates angles between two 2D vectors.
Definition at line 331 of file vectorHelpers.h.
Here is the call graph for this function: Here is the caller graph for this function:| Vector< T, 3 > olb::util::angleBetweenVectors | ( | const Vector< T, 3 > & | a, |
| const Vector< T, 3 > & | b ) |
Calculates angles between two 3D vectors.
Definition at line 342 of file vectorHelpers.h.
|
inline |
Definition at line 88 of file vectorHelpers.h.
References approxEqual(), fabs(), and nearZero().
Here is the call graph for this function:
|
inline |
Definition at line 79 of file vectorHelpers.h.
Here is the caller graph for this function:Definition at line 596 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| std::vector< T > olb::util::assign | ( | T | a, |
| T | b ) |
Definition at line 399 of file vectorHelpers.h.
| std::vector< T > olb::util::assign | ( | T | a, |
| T | b, | ||
| T | c ) |
Definition at line 408 of file vectorHelpers.h.
Definition at line 614 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 641 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
|
inline |
Definition at line 632 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
|
inline |
Definition at line 623 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 689 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v, and log().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| T olb::util::average | ( | const Vector< T, Size > & | a | ) |
computes the average of all elements
Definition at line 246 of file vectorHelpers.h.
Here is the caller graph for this function:| bool olb::util::bisectDistance | ( | S & | distance, |
| const Vector< S, D > & | origin, | ||
| const Vector< S, D > & | direction, | ||
| S | pitch, | ||
| S | precision, | ||
| F1 | isInside, | ||
| F2 | isInsideBoundingBox ) |
Using a bisect to find the unsigned distance (false if distance was not found, true if distance was found)
| distance | computed distance from origin to surface in direction |
| direction | is saved here |
| origin | the point we want to calculate the distance from |
| direction | the considered direction |
| pitch | a first guess for the distance, must be > 0 (if origin is inside origin + normalize(direction) * pitch should be outside and if origin is outside origin + normalize(direction) * pitch should be inside) |
| precision | when the change of the found distance reaches the defined precision, the iteration stops |
| isInside | function that defines if a point is inside or outside a geometry (usually the ()-operator of an Indicator) |
| isInsideBoundingBox | function that defines if a point is inside the enclosing bounding box (maybe needs at least one extra layer between geometry surface and bounding box surface) |
Definition at line 168 of file indicatorBase.h.
References abs(), distance(), norm(), and normalize().
Here is the call graph for this function:| Vector< T, utilities::dimensions::convert< D >::matrix > olb::util::calculateInverseRotationMatrix | ( | const Vector< T, utilities::dimensions::convert< D >::rotation > & | angle | ) |
Definition at line 137 of file geometricOperations.h.
|
constexpr |
Calculate local velocity.
Definition at line 194 of file geometricOperations.h.
References olb::crossProduct3D().
Here is the call graph for this function: Here is the caller graph for this function:| Vector< T, utilities::dimensions::convert< D >::matrix > olb::util::calculateRotationMatrix | ( | const Vector< T, utilities::dimensions::convert< D >::rotation > & | angle | ) |
Definition at line 69 of file geometricOperations.h.
Here is the call graph for this function:Definition at line 900 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v, and olb::util::ADf< T, DIM >::d().
Here is the call graph for this function: Here is the caller graph for this function:| Vector< T, Size > olb::util::ceil | ( | const Vector< T, Size > & | a | ) |
applies ceil to each component of a vector
Definition at line 224 of file vectorHelpers.h.
References ceil().
Here is the call graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 117 of file vectorHelpers.h.
| C< T > olb::util::copyAs | ( | const C< S > & | input | ) |
copy vector with specified typecast
Definition at line 72 of file adHelpers.h.
| void olb::util::copyDerivatives | ( | T * | target, |
| const TAD * | source, | ||
| int | length ) |
Copy the derivatives from an ADf array into an array.
| length | = length of the array |
Definition at line 61 of file adHelpers.h.
Here is the caller graph for this function:
|
inline |
Definition at line 109 of file vectorHelpers.h.
|
inline |
Definition at line 101 of file vectorHelpers.h.
Here is the caller graph for this function:Definition at line 578 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| Timer< T > * olb::util::createTimer | ( | XMLreader & | param, |
| const UnitConverter< T, DESCRIPTOR > & | converter, | ||
| size_t | numLatticePoints ) |
Definition at line 260 of file timer.hh.
References olb::UnitConverter< T, DESCRIPTOR >::getLatticeTime(), and olb::XMLreader::readOrWarn().
Here is the call graph for this function:| decltype(Vector< decltype(util::sqrt(T())), D >()) olb::util::degreeToRadian | ( | const Vector< T, D > & | angle | ) |
Definition at line 42 of file geometricOperations.h.
Here is the call graph for this function: Here is the caller graph for this function:| decltype(util::sqrt(T())) olb::util::degreeToRadian | ( | T | angle | ) |
Definition at line 49 of file geometricOperations.h.
References degreeToRadian().
Here is the call graph for this function:| T olb::util::densityFromPressure | ( | T | latticePressure | ) |
| auto olb::util::derivativeFAD | ( | F | f, |
| const S * | input ) |
Compute derivatives of a function f: S^sourceDIM -> T via forward AD Signature is "V f(U*)" so f is expected to return a single value.
It must be (captured by) a lambda function that handles arbitrary types, so "auto f(auto x)" is to be written.
Definition at line 128 of file adHelpers.h.
References copyDerivatives(), copyN(), and iniDiagonal().
Here is the call graph for this function:| auto olb::util::derivativeFAD | ( | F | f, |
| const S | input ) |
Compute derivatives of a function f: S -> T via forward AD Signature is "V f(U)" so f is expected to accept and return a single value.
It must be (captured by) a lambda function that handles arbitrary types, so "auto f(auto x)" is to be written.
Definition at line 115 of file adHelpers.h.
References olb::util::ADf< T, DIM >::setDiffVariable().
Here is the call graph for this function:| void olb::util::derivativeFAD | ( | F | f, |
| T * | output, | ||
| const S * | input, | ||
| unsigned | targetDIM ) |
Compute derivatives of a function f: S^sourceDIM -> T^targetDIM via forward AD Signature of f is "void f(V*, U*)", it is expected to modify the first argument in-place.
f must be (captured by) a lambda function that handles arbitrary types, so "void f(auto y, auto x)" is to be written.
Definition at line 150 of file adHelpers.h.
References copyDerivatives(), copyN(), and iniDiagonal().
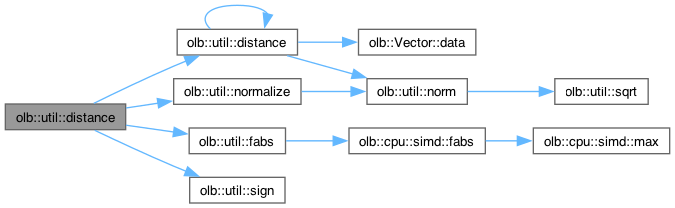
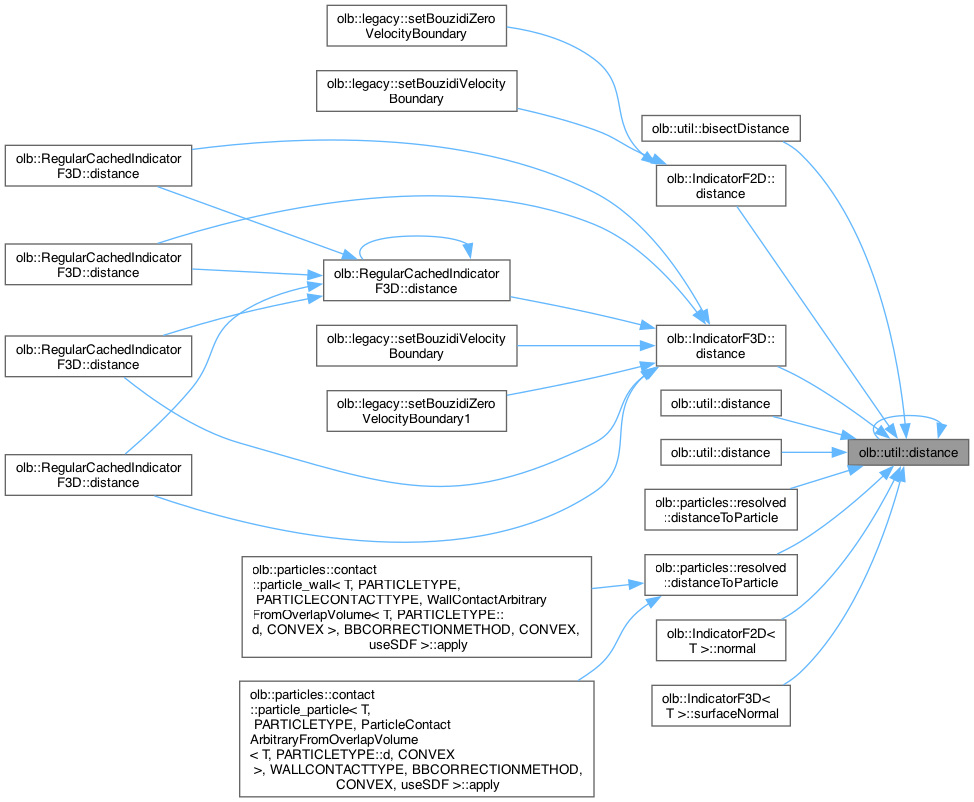
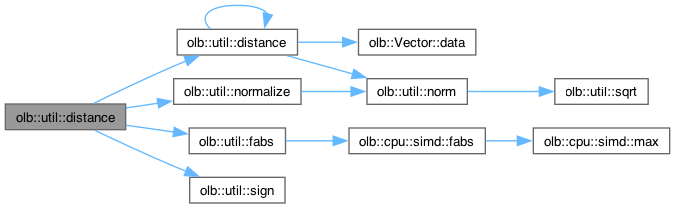
Here is the call graph for this function:| bool olb::util::distance | ( | S & | distance, |
| const Vector< S, D > & | origin, | ||
| const Vector< S, D > & | direction, | ||
| S | precision, | ||
| F1 | sdf, | ||
| F2 | isInsideBoundingBox, | ||
| const unsigned | maxIt = 1e6 ) |
Definition at line 95 of file indicatorBase.h.
References distance(), fabs(), normalize(), and sign().
Here is the call graph for this function:| bool olb::util::distance | ( | S & | distance, |
| const Vector< S, D > & | origin, | ||
| const Vector< S, D > & | direction, | ||
| S | precision, | ||
| S | pitch, | ||
| F1 | isInside, | ||
| F2 | isInsideBoundingBox ) |
Definition at line 36 of file indicatorBase.h.
References olb::Vector< T, D >::data(), distance(), and norm().
Here is the call graph for this function: Here is the caller graph for this function:| bool olb::util::distance | ( | S & | distance, |
| const Vector< S, D > & | origin, | ||
| const Vector< S, D > & | direction, | ||
| S | precision, | ||
| std::function< S(const Vector< S, D > &)> | sdf, | ||
| S | maxDistance, | ||
| const unsigned | maxIt = 1e6 ) |
Definition at line 123 of file indicatorBase.h.
References distance(), fabs(), normalize(), and sign().
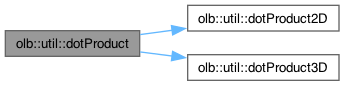
Here is the call graph for this function:| T olb::util::dotProduct | ( | const Vector< T, D > & | a, |
| const Vector< T, D > & | b ) |
dot product
Definition at line 183 of file vectorHelpers.h.
References dotProduct2D(), and dotProduct3D().
Here is the call graph for this function:| T olb::util::dotProduct2D | ( | const Vector< T, 2 > & | a, |
| const Vector< T, 2 > & | b ) |
dot product, only valid in 2d
Definition at line 176 of file vectorHelpers.h.
Here is the caller graph for this function:| T olb::util::dotProduct3D | ( | const Vector< T, 3 > & | a, |
| const Vector< T, 3 > & | b ) |
dot product, only valid in 3d
Definition at line 169 of file vectorHelpers.h.
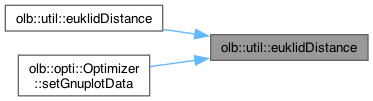
Here is the caller graph for this function:| auto olb::util::euklidDistance | ( | const C & | x, |
| const C & | y ) |
Euclidean distance for Container-type array.
Definition at line 97 of file norm.h.
References euklidDistance(), and OLB_ASSERT.
Here is the call graph for this function:| T olb::util::euklidDistance | ( | const T | x[], |
| const T | y[], | ||
| int | dim ) |
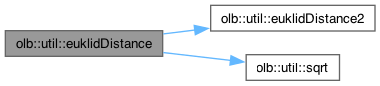
Euclidean distance between two arrays.
Definition at line 67 of file norm.h.
References euklidDistance2(), and sqrt().
Here is the call graph for this function: Here is the caller graph for this function:| auto olb::util::euklidDistance2 | ( | const C & | x, |
| const C & | y ) |
Squared Euclidean distance for Container-type array.
Definition at line 82 of file norm.h.
References euklidDistance2(), and OLB_ASSERT.
Here is the call graph for this function:| T olb::util::euklidDistance2 | ( | const T | x[], |
| const T | y[], | ||
| int | dim ) |
| auto olb::util::euklidN | ( | const C & | x | ) |
| T olb::util::euklidN | ( | const T | x[], |
| int | dim ) |
Euclidean norm of an array.
Definition at line 60 of file norm.h.
References euklidN2(), and sqrt().
Here is the call graph for this function: Here is the caller graph for this function:| auto olb::util::euklidN2 | ( | const C & | x | ) |
Squared Euclidean norm for Container-type array.
Definition at line 75 of file norm.h.
References euklidN2().
Here is the call graph for this function:| T olb::util::euklidN2 | ( | const T | x[], |
| int | dim ) |
| int olb::util::evaluateIntegration | ( | std::vector< T > & | testValues, |
| bool | print = false ) |
Definition at line 34 of file integrationTestUtils.h.
References print().
Here is the call graph for this function:| Vector< T, D > olb::util::executeRotation | ( | const Vector< T, D > & | input, |
| const Vector< T, utilities::dimensions::convert< D >::matrix > & | rotationMatrix, | ||
| const Vector< T, D > & | rotationCenter = Vector<T, D>(0.) ) |
Rotates the input around the rotationCenter with a given rotationMatrix.
Definition at line 146 of file geometricOperations.h.
Here is the caller graph for this function:Definition at line 455 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 996 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v, and sign().
Here is the call graph for this function:| cpu::simd::Pack< T > olb::util::fabs | ( | cpu::simd::Pack< T > | value | ) |
Definition at line 106 of file pack.h.
References olb::cpu::simd::fabs().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 184 of file expr.h.
References olb::Expr::Abs.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| int olb::util::findVelocity | ( | const int | v[DESCRIPTORBASE::d] | ) |
Definition at line 237 of file util.h.
Definition at line 869 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v, and olb::util::ADf< T, DIM >::d().
Here is the call graph for this function: Here is the caller graph for this function:| Vector< T, Size > olb::util::floor | ( | const Vector< T, Size > & | a | ) |
applies floor to each component of a vector
Definition at line 213 of file vectorHelpers.h.
References floor().
Here is the call graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 710 of file aDiff.h.
References fmod().
Here is the call graph for this function:
|
inline |
| Vector< T, Size > olb::util::fmod | ( | const Vector< T, Size > & | a, |
| S | b ) |
applies fmod to each component of a vector
Definition at line 235 of file vectorHelpers.h.
References fmod().
Here is the call graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Variant of fmod (floating point modulo) that always returns positive values.
Definition at line 39 of file calc.h.
References fmod().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
|
inline |
| std::vector< T > olb::util::fromVector2 | ( | const Vector< T, 2 > & | vec | ) |
Definition at line 135 of file vectorHelpers.h.
| std::vector< T > olb::util::fromVector3 | ( | const Vector< T, 3 > & | vec | ) |
Definition at line 126 of file vectorHelpers.h.
Here is the caller graph for this function:| int olb::util::get_nearest_link | ( | const std::vector< T > & | vec | ) |
Util Function for Wall Model of Malaspinas get link with smallest angle to a vector.
Definition at line 354 of file util.h.
Here is the call graph for this function:| C< ADf< S, n > > olb::util::iniAD | ( | const C< S > & | source | ) |
copy values and initialize derivatives
Definition at line 101 of file adHelpers.h.
References iniDiagonal().
Here is the call graph for this function:| ADf< S, n > * olb::util::iniAD | ( | const S * | source | ) |
copy array values and initialize derivatives
Definition at line 92 of file adHelpers.h.
References copyN(), and iniDiagonal().
Here is the call graph for this function:| ADf< S, 1 > olb::util::iniAD | ( | const S | source | ) |
copy value and initialize derivative
Definition at line 84 of file adHelpers.h.
References olb::util::ADf< T, DIM >::setDiffVariable().
Here is the call graph for this function:| void olb::util::iniDiagonal | ( | C & | a | ) |
Definition at line 49 of file adHelpers.h.
| void olb::util::iniDiagonal | ( | SAD * | a, |
| int | dim ) |
The variables of an array are set to be the differential variables.
--> d/di a_j = 1 if (i==j) else 0.
Definition at line 42 of file adHelpers.h.
Here is the caller graph for this function:
|
inline |
|
inline |
Definition at line 103 of file util.h.
Here is the call graph for this function:| Vector< T, D > olb::util::invertRotation | ( | const Vector< T, D > & | input, |
| const Vector< T, utilities::dimensions::convert< D >::matrix > & | rotationMatrix, | ||
| const Vector< T, D > & | rotationCenter = Vector<T, D>(0.) ) |
Rotates the input around the rotationCenter with a given rotationMatrix in the opposite direction.
Definition at line 182 of file geometricOperations.h.
References executeRotation().
Here is the call graph for this function:| Vector< T, utilities::dimensions::convert< D >::matrix > olb::util::invertRotationMatrix | ( | const Vector< T, utilities::dimensions::convert< D >::matrix > & | rotationMatrix | ) |
Definition at line 113 of file geometricOperations.h.
| bool olb::util::isContained | ( | const C & | c, |
| U | object ) |
Check, if object is contained in iteratable container c.
Definition at line 435 of file vectorHelpers.h.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 475 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 496 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 517 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
| cpu::simd::Pack< T > olb::util::max | ( | cpu::simd::Pack< T > | rhs, |
| cpu::simd::Pack< T > | lhs ) |
Definition at line 130 of file pack.h.
References olb::cpu::simd::max().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlineconstexpr |
Definition at line 47 of file oalgorithm.h.
|
inlineconstexpr |
Definition at line 52 of file oalgorithm.h.
|
inlineconstexpr |
Definition at line 37 of file oalgorithm.h.
|
inlineconstexpr |
Definition at line 42 of file oalgorithm.h.
|
inline |
Definition at line 64 of file oalgorithm.h.
|
inline |
Definition at line 58 of file oalgorithm.h.
| T olb::util::max_element | ( | const Vector< T, Size > & | a | ) |
finds maximum element of all elements
Definition at line 257 of file vectorHelpers.h.
References max().
Here is the call graph for this function: Here is the caller graph for this function:| T olb::util::maxElementAbs | ( | const Vector< T, Size > & | a | ) |
finds maximum element of all absolute elements
Definition at line 305 of file vectorHelpers.h.
References abs().
Here is the call graph for this function: Here is the caller graph for this function:| unsigned olb::util::maxElementAbsPos | ( | const Vector< T, Size > & | a | ) |
finds position of maximum element of all absolute elements
Definition at line 318 of file vectorHelpers.h.
References abs().
Here is the call graph for this function: Here is the caller graph for this function:| unsigned olb::util::maxElementPos | ( | const Vector< T, Size > & | a | ) |
finds position of maximum element of all elements
Definition at line 279 of file vectorHelpers.h.
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
| cpu::simd::Pack< T > olb::util::min | ( | cpu::simd::Pack< T > | rhs, |
| cpu::simd::Pack< T > | lhs ) |
Definition at line 124 of file pack.h.
References olb::cpu::simd::min().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlineconstexpr |
Definition at line 81 of file oalgorithm.h.
|
inlineconstexpr |
Definition at line 86 of file oalgorithm.h.
|
inlineconstexpr |
Definition at line 71 of file oalgorithm.h.
|
inlineconstexpr |
Definition at line 76 of file oalgorithm.h.
|
inline |
Definition at line 98 of file oalgorithm.h.
|
inline |
Definition at line 92 of file oalgorithm.h.
| T olb::util::min_element | ( | const Vector< T, Size > & | a | ) |
finds minimum element of all elements
Definition at line 268 of file vectorHelpers.h.
References min().
Here is the call graph for this function: Here is the caller graph for this function:| unsigned olb::util::minElementPos | ( | const Vector< T, Size > & | a | ) |
finds position of minimum element of all elements
Definition at line 292 of file vectorHelpers.h.
|
inline |
Definition at line 1087 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
return true if a is close to zero
Definition at line 53 of file vectorHelpers.h.
|
inline |
Definition at line 68 of file vectorHelpers.h.
| auto olb::util::norm | ( | const ARRAY_LIKE & | u | ) |
| T olb::util::norm | ( | const std::vector< T > & | a | ) |
l2 norm of a vector of arbitrary length
Definition at line 146 of file vectorHelpers.h.
References sqrt().
Here is the call graph for this function: Here is the caller graph for this function:| T olb::util::norm2 | ( | const std::vector< T > & | a | ) |
l2 norm to the power of 2 of a vector of arbitrary length
Definition at line 158 of file vectorHelpers.h.
Here is the caller graph for this function:| std::vector< T > olb::util::normalize | ( | const std::vector< T > & | a | ) |
returns a normalized vector, works for arbitrary lengths
Definition at line 200 of file vectorHelpers.h.
References norm().
Here is the call graph for this function:Definition at line 193 of file vectorHelpers.h.
References norm().
Here is the call graph for this function: Here is the caller graph for this function:| auto olb::util::normSqr | ( | const ARRAY_LIKE & | u | ) |
| T olb::util::normSqr | ( | const ScalarVector< T, D, IMPL > & | u | ) |
| T olb::util::normSqr | ( | const T * | u | ) |
| T olb::util::normSqr | ( | std::initializer_list< T > | data | ) |
|
inlineconstexpr |
Definition at line 762 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 768 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 774 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
|
inlineconstexpr |
Definition at line 818 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 824 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 830 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inline |
Definition at line 277 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 836 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 842 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 848 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 744 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 750 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 756 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 781 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 787 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 793 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 799 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 805 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inlineconstexpr |
Definition at line 811 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v.
|
inline |
Definition at line 288 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
|
constexpr |
Return array of population indices where c[iPop][iD] == NORMAL[iD].
Definition at line 226 of file util.h.
References olb::meta::array_from_index_sequence(), and olb::meta::indexed_pack_contains().
Here is the call graph for this function: Here is the caller graph for this function:
|
constexpr |
Return array of population indices where c[iVel] == value.
Definition at line 216 of file util.h.
References olb::meta::array_from_index_sequence().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Definition at line 415 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v, olb::util::ADf< T, DIM >::d(), exp(), log(), and nearZero().
Here is the call graph for this function:
|
inline |
Definition at line 405 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
|
inline |
Definition at line 437 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
|
inline |
Definition at line 396 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
| cpu::simd::Pack< T > olb::util::pow | ( | cpu::simd::Pack< T > | base, |
| cpu::simd::Pack< T > | exp ) |
Definition at line 112 of file pack.h.
References exp(), and olb::cpu::simd::pow().
Here is the call graph for this function:| cpu::simd::Pack< T > olb::util::pow | ( | cpu::simd::Pack< T > | base, |
| S | exp ) |
Definition at line 118 of file pack.h.
References exp(), and olb::cpu::simd::pow().
Here is the call graph for this function:Definition at line 188 of file expr.h.
References exp(), and olb::Expr::Pow.
Here is the call graph for this function:
|
inline |
|
inline |
|
inline |
| T olb::util::pressureFromDensity | ( | T | latticeDensity | ) |
| void olb::util::print | ( | U | data, |
| const std::string & | name = "", | ||
| OstreamManager | clout = OstreamManager(std::cout,"print"), | ||
| const char | delimiter = ',' ) |
Definition at line 419 of file vectorHelpers.h.
Here is the caller graph for this function:| decltype(Vector< decltype(util::sqrt(T())), D >()) olb::util::radianToDegree | ( | const Vector< T, D > & | angle | ) |
| decltype(util::sqrt(T())) olb::util::radianToDegree | ( | T | angle | ) |
Definition at line 63 of file geometricOperations.h.
References radianToDegree().
Here is the call graph for this function:| std::vector< int > olb::util::remainingIndexes | ( | const std::vector< int > & | indices | ) |
finds all the remaining indexes of a lattice given some other indexes
Definition at line 333 of file util.h.
|
constexpr |
Rotate moment of inertia (mofi)
Definition at line 216 of file geometricOperations.h.
References olb::Matrix< T, ROWS, COLS >::transpose().
Here is the call graph for this function:Definition at line 928 of file aDiff.h.
References olb::util::ADf< T, DIM >::_v, and olb::util::ADf< T, DIM >::d().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| T olb::util::scalarProduct | ( | const std::vector< T > & | u1, |
| const std::vector< T > & | u2 ) |
| T olb::util::scalarProduct | ( | const T | u1[d], |
| const T | u2[d] ) |
|
inline |
Definition at line 569 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Definition at line 446 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
| T olb::util::sqr | ( | T | arg | ) |
Definition at line 556 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, olb::util::ADf< T, DIM >::_v, olb::util::ADf< T, DIM >::d(), and nearZero().
Here is the call graph for this function:| cpu::simd::Pack< T > olb::util::sqrt | ( | cpu::simd::Pack< T > | value | ) |
Definition at line 180 of file expr.h.
References olb::Expr::Sqrt.
|
inline |
|
inline |
|
inline |
|
inline |
|
constexpr |
Compute opposites of wall-incoming population indices.
Definition at line 256 of file util.h.
References olb::meta::array_from_index_sequence(), and olb::meta::map_index_sequence().
Here is the call graph for this function:
|
constexpr |
Definition at line 310 of file util.h.
References olb::meta::array_from_index_sequence().
Here is the call graph for this function:
|
constexpr |
Definition at line 321 of file util.h.
References olb::meta::array_from_index_sequence().
Here is the call graph for this function:
|
constexpr |
Definition at line 286 of file util.h.
References olb::meta::array_from_index_sequence().
Here is the call graph for this function:
|
constexpr |
Definition at line 272 of file util.h.
References olb::meta::array_from_index_sequence().
Here is the call graph for this function:| Vector< S, D > olb::util::surfaceNormal | ( | const Vector< S, D > & | pos, |
| const S | meshSize, | ||
| F1 | sdf ) |
Definition at line 236 of file indicatorBase.h.
Here is the caller graph for this function:Definition at line 587 of file aDiff.h.
References olb::util::ADf< T, DIM >::_d, and olb::util::ADf< T, DIM >::_v.
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inlineconstexpr |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |