|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
#include <solverParameters.h>
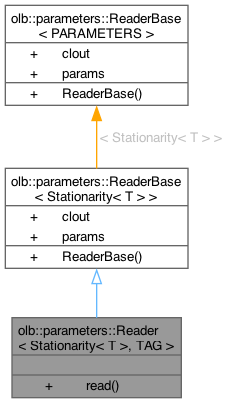
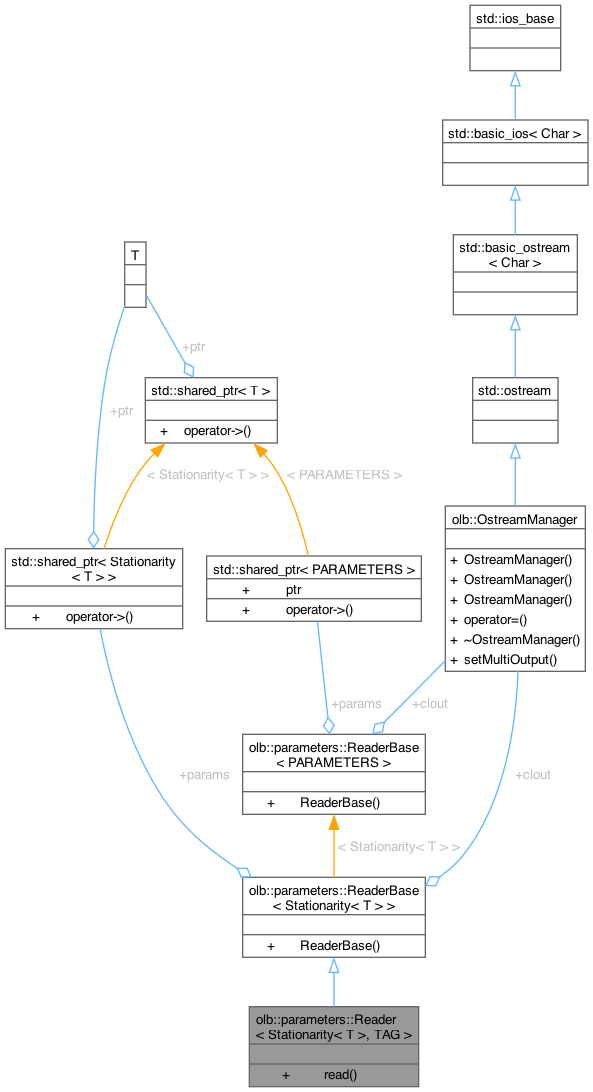
 Inheritance diagram for olb::parameters::Reader< Stationarity< T >, TAG >: Collaboration diagram for olb::parameters::Reader< Stationarity< T >, TAG >:
Inheritance diagram for olb::parameters::Reader< Stationarity< T >, TAG >: Collaboration diagram for olb::parameters::Reader< Stationarity< T >, TAG >:Public Member Functions | |
| void | read (XMLreader const &xml) |
| Public Member Functions inherited from olb::parameters::ReaderBase< Stationarity< T > > | |
| ReaderBase (std::shared_ptr< Stationarity< T > > params_) | |
Additional Inherited Members | |
| Public Attributes inherited from olb::parameters::ReaderBase< Stationarity< T > > | |
| OstreamManager | clout |
| std::shared_ptr< Stationarity< T > > | params |
Definition at line 321 of file solverParameters.h.
|
inline |
Definition at line 325 of file solverParameters.h.
References olb::parameters::ReaderBase< PARAMETERS >::params, and olb::XMLreader::readOrWarn().
Here is the call graph for this function: