|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
Some arithmetic helper functions. More...
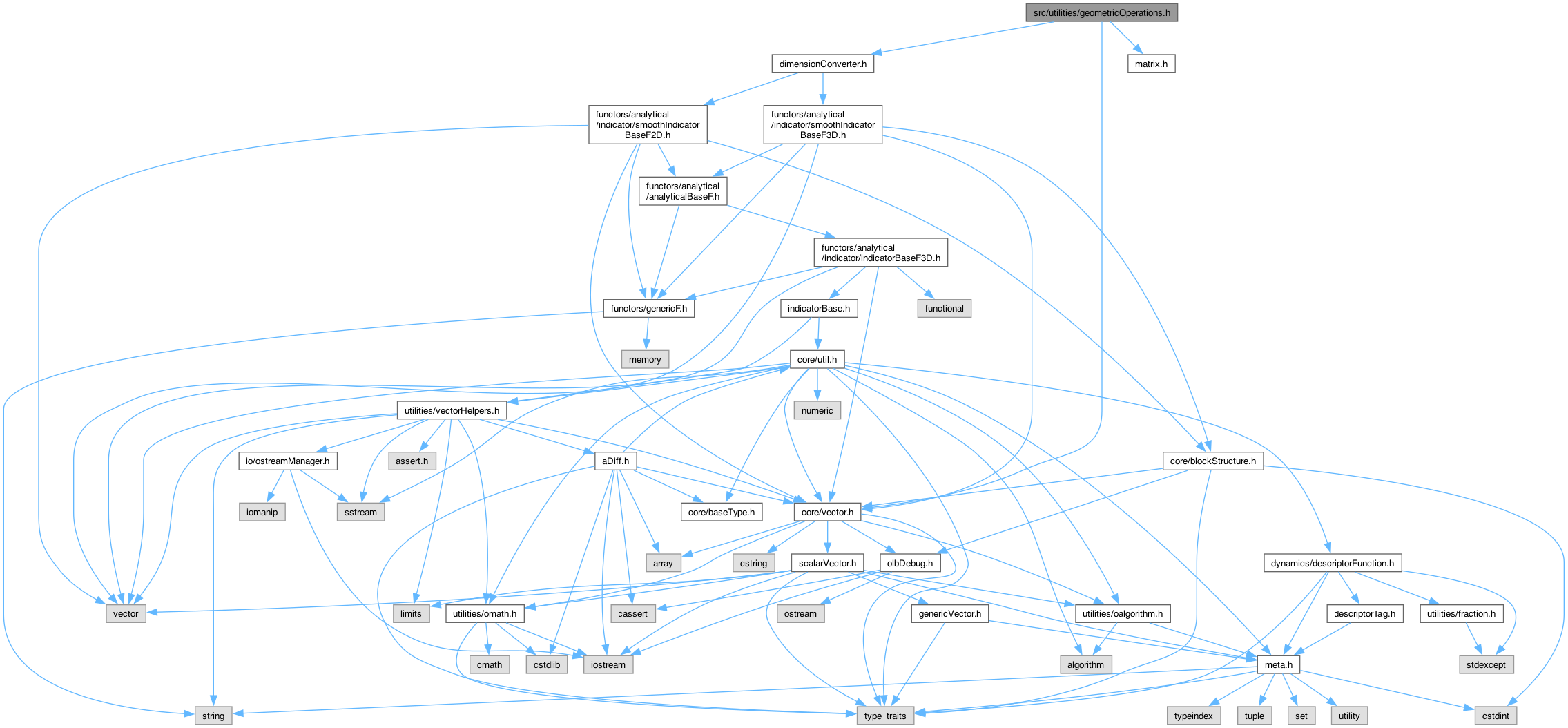
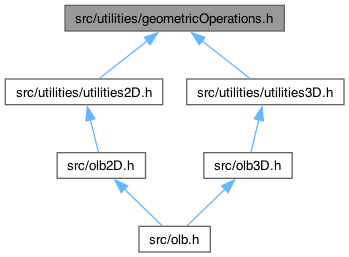
 Include dependency graph for geometricOperations.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for geometricOperations.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Namespaces | |
| namespace | olb |
| Top level namespace for all of OpenLB. | |
| namespace | olb::util |
Functions | |
| template<typename T , unsigned D> | |
| decltype(Vector< decltype(util::sqrt(T())), D >()) | olb::util::degreeToRadian (const Vector< T, D > &angle) |
| template<typename T > | |
| decltype(util::sqrt(T())) | olb::util::degreeToRadian (T angle) |
| template<typename T , unsigned D> | |
| decltype(Vector< decltype(util::sqrt(T())), D >()) | olb::util::radianToDegree (const Vector< T, D > &angle) |
| template<typename T > | |
| decltype(util::sqrt(T())) | olb::util::radianToDegree (T angle) |
| template<typename T , unsigned D> | |
| Vector< T, utilities::dimensions::convert< D >::matrix > | olb::util::calculateRotationMatrix (const Vector< T, utilities::dimensions::convert< D >::rotation > &angle) |
| template<typename T , unsigned D> | |
| Vector< T, utilities::dimensions::convert< D >::matrix > | olb::util::invertRotationMatrix (const Vector< T, utilities::dimensions::convert< D >::matrix > &rotationMatrix) |
| template<typename T , unsigned D> | |
| Vector< T, utilities::dimensions::convert< D >::matrix > | olb::util::calculateInverseRotationMatrix (const Vector< T, utilities::dimensions::convert< D >::rotation > &angle) |
| template<typename T , unsigned D, bool OUTPUT_USES_ROTATION_CENTER_AS_ORIGIN = false> | |
| Vector< T, D > | olb::util::executeRotation (const Vector< T, D > &input, const Vector< T, utilities::dimensions::convert< D >::matrix > &rotationMatrix, const Vector< T, D > &rotationCenter=Vector< T, D >(0.)) |
| Rotates the input around the rotationCenter with a given rotationMatrix. | |
| template<typename T , unsigned D, bool OUTPUT_USES_ROTATION_CENTER_AS_ORIGIN = false> | |
| Vector< T, D > | olb::util::invertRotation (const Vector< T, D > &input, const Vector< T, utilities::dimensions::convert< D >::matrix > &rotationMatrix, const Vector< T, D > &rotationCenter=Vector< T, D >(0.)) |
| Rotates the input around the rotationCenter with a given rotationMatrix in the opposite direction. | |
| template<typename T , unsigned D> | |
| constexpr Vector< T, D > | olb::util::calculateLocalVelocity (const Vector< T, D > &rotationCenter, const Vector< T, D > &velocity, const Vector< T, utilities::dimensions::convert< D >::rotation > &angularVelocity, const Vector< T, D > &position) |
| Calculate local velocity. | |
| template<typename T > | |
| constexpr Matrix< T, 3, 3 > | olb::util::rotateMofi (const Vector< T, 3 > &mofi, const Vector< T, 9 > &rotationMatrix) |
| Rotate moment of inertia (mofi) | |
Some arithmetic helper functions.
Definition in file geometricOperations.h.