|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
Namespaces | |
| namespace | access |
| namespace | boundaries |
| namespace | communication |
| namespace | conditions |
| namespace | contact |
| namespace | creators |
| namespace | defaults |
| namespace | dynamics |
| namespace | interaction |
| namespace | io |
| namespace | resolved |
| namespace | sorting |
| namespace | statistics |
| namespace | subgrid |
Classes | |
| struct | apply_external_acceleration_parallel |
| Apply external acceleration (e.g. for apply gravity) More... | |
| struct | apply_external_acceleration_single_cuboid |
| Apply external acceleration (e.g. for apply gravity) More... | |
| struct | communicate_surface_force |
| Communicate surface force of parallel particles. More... | |
| struct | couple_lattice_to_parallel_particles |
| Couple lattice to parallel particles. More... | |
| struct | couple_lattice_to_particles_single_cuboid |
| Couple lattice to particles. More... | |
| struct | couple_parallel_particles_to_lattice |
| Couple particles to lattice. More... | |
| struct | couple_particles_to_lattice_single_cuboid |
| Couple particles to lattice. More... | |
| struct | discrete_points_on_hull |
| struct | ParallelParticleLocator |
| class | Particle |
| class | ParticleSystem |
| struct | process_dynamics_parallel |
| Process particle dynamics. More... | |
| struct | process_dynamics_single_cuboid |
| Process particle dynamics. More... | |
| class | SuperParticleSystem |
| struct | update_particle_core_distribution |
| Update particle core distribution of parallel particles. More... | |
Typedefs | |
| template<typename T , typename PARTICLETYPE > | |
| using | XParticleSystem |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE > | |
| using | couple_lattice_to_particles |
| Aliases. | |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE > | |
| using | couple_particles_to_lattice |
| template<typename T , typename PARTICLETYPE > | |
| using | process_dynamics |
| template<typename T , typename PARTICLETYPE > | |
| using | apply_gravity |
| template<typename T , typename PARTICLETYPE > | |
| using | communicate_parallel_surface_force = communicate_surface_force<T,PARTICLETYPE> |
Functions | |
| template<typename DESCRIPTOR , typename CELL , typename V = typename CELL::value_t> | |
| void | resetParticleRelatedFields (CELL &cell) noexcept |
| template<typename DESCRIPTOR , typename CELL , typename V = typename CELL::value_t> | |
| void | resetParticleContactRelatedFields (CELL &cell) noexcept |
| template<typename DESCRIPTOR , typename CELL , typename V = typename CELL::value_t> | |
| void | resetAllParticleRelatedFields (CELL &cell) noexcept |
| template<typename T , typename PARTICLETYPE , typename F > | |
| void | doForParticle (Particle< T, PARTICLETYPE > &particle, F f) |
| template<typename T , typename PARTICLETYPE , typename PCONDITION = conditions::valid_particles, typename F > | |
| void | doWhenMeetingCondition (Particle< T, PARTICLETYPE > &particle, F f) |
| template<typename T , typename PARTICLETYPE , typename PCONDITION = conditions::valid_particles, typename F > | |
| void | doWhenMeetingCondition (Particle< T, PARTICLETYPE > &particle, F f, int globiC) |
| template<typename T , typename PARTICLETYPE , typename PCONDITION = conditions::valid_particles, typename F > | |
| void | forParticlesInParticleSystem (ParticleSystem< T, PARTICLETYPE > &particleSystem, F f, int globiC) |
| template<typename T , typename PARTICLETYPE , typename PCONDITION = conditions::valid_particles, typename F > | |
| void | forParticlesInParticleSystem (ParticleSystem< T, PARTICLETYPE > &particleSystem, F f) |
| template<typename T , typename PARTICLETYPE , typename PCONDITION = conditions::valid_particles, typename F > | |
| void | forParticlesInXParticleSystem (XParticleSystem< T, PARTICLETYPE > &xParticleSystem, F f) |
| Iterate over particles in x particle system. | |
| template<unsigned D> | |
| constexpr bool | isPeriodic (const Vector< bool, D > &periodic) |
| template<typename T > | |
| std::array< Vector< T, 3 >, 26 > | discretePointsOnSphericalHull (Vector< T, 3 > position, T radius) |
| template<typename T > | |
| std::array< Vector< T, 2 >, 8 > | discretePointsOnSphericalHull (Vector< T, 2 > position, T radius) |
| template<typename T , typename PARTICLETYPE > | |
| void | purgeInvalidParticles (XParticleSystem< T, PARTICLETYPE > &xParticleSystem) |
| template<typename T , typename PARTICLETYPE , std::size_t selectedID, typename F > | |
| void | doForParticleMatchingID (XParticleSystem< T, PARTICLETYPE > &xParticleSystem, F f) |
| template<typename T , typename PARTICLETYPE , typename PCONDITION = conditions::valid_particles> | |
| bool | searchParticleLocally (ParticleSystem< T, PARTICLETYPE > &particleSystem, std::size_t globalIDrequested, std::size_t &localParticleID) |
| template<typename T , unsigned D> | |
| bool | getBlockParticleIntersection (const BlockGeometry< T, D > &blockGeometry, T invDeltaX, LatticeR< D > &start, LatticeR< D > &end, Vector< T, D > position, T circumRadius) |
| template<typename T , unsigned D> | |
| void | checkSmoothIndicatorOutOfGeometry (bool &outOfGeometry, Vector< T, D > &ghostPos, const PhysR< T, D > &cellMin, const PhysR< T, D > &cellMax, const Vector< T, D > &position, T circumRadius, const Vector< bool, D > &periodic) |
| template<typename T , typename DESCRIPTOR , typename F > | |
| void | forSpatialLocationsInBlockParticleIntersection (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice, Vector< T, DESCRIPTOR::d > position, T circumRadius, F f) |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE > | |
| void | setBlockParticleField (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice, UnitConverter< T, DESCRIPTOR > const &converter, Particle< T, PARTICLETYPE > &particle) |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE , typename PARTICLECONTACTTYPE , typename WALLCONTACTTYPE , typename F = decltype(defaults::periodicity<PARTICLETYPE::d>)> | |
| void | setBlockParticleField (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice, UnitConverter< T, DESCRIPTOR > const &converter, ParticleSystem< T, PARTICLETYPE > &particleSystem, contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > &particleContacts, size_t iP, Particle< T, PARTICLETYPE > &particle, std::vector< SolidBoundary< T, DESCRIPTOR::d > > &solidBoundaries, const PhysR< T, DESCRIPTOR::d > &cellMin=PhysR< T, DESCRIPTOR::d >(std::numeric_limits< T >::quiet_NaN()), const PhysR< T, DESCRIPTOR::d > &cellMax=PhysR< T, DESCRIPTOR::d >(std::numeric_limits< T >::quiet_NaN()), F getSetupPeriodicity=defaults::periodicity< PARTICLETYPE::d >) |
| template<typename T , typename DESCRIPTOR > | |
| void | resetBlockParticleField (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice) |
| template<typename T , typename DESCRIPTOR > | |
| void | resetBlockContactField (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice) |
| template<typename T , unsigned D> | |
| bool | getBlockParticleIntersection (const BlockGeometry< T, D > &blockGeometry, T invDeltaX, LatticeR< D > &start, LatticeR< D > &end, PhysR< T, D > position, T circumRadius) |
| template<typename T , unsigned D> | |
| void | checkSmoothIndicatorOutOfGeometry (bool &surfaceOutOfGeometry, PhysR< T, D > &ghostPos, const PhysR< T, D > &cellMin, const PhysR< T, D > &cellMax, const PhysR< T, D > &position, T circumRadius, const Vector< bool, D > &periodic) |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE > | |
| void | setBlockParticleField (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice, UnitConverter< T, DESCRIPTOR > const &converter, const PhysR< T, DESCRIPTOR::d > &cellMin, const PhysR< T, DESCRIPTOR::d > &cellMax, Particle< T, PARTICLETYPE > &particle, const Vector< bool, DESCRIPTOR::d > &periodic) |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE , typename PARTICLECONTACTTYPE , typename WALLCONTACTTYPE , typename F > | |
| void | setBlockParticleField (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice, UnitConverter< T, DESCRIPTOR > const &converter, const PhysR< T, DESCRIPTOR::d > &cellMin, const PhysR< T, DESCRIPTOR::d > &cellMax, ParticleSystem< T, PARTICLETYPE > &particleSystem, contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > &contactContainer, size_t iP, Particle< T, PARTICLETYPE > &particle, std::vector< SolidBoundary< T, DESCRIPTOR::d > > &solidBoundaries, F getSetupPeriodicity) |
| template<typename T , typename DESCRIPTOR , typename F > | |
| void | forSpatialLocationsInBlockParticleIntersection (const BlockGeometry< T, DESCRIPTOR::d > &blockGeometry, BlockLattice< T, DESCRIPTOR > &blockLattice, int padding, Vector< T, DESCRIPTOR::d > position, T circumRadius, F f) |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE > | |
| void | setSuperParticleField (const SuperGeometry< T, DESCRIPTOR::d > &sGeometry, SuperLattice< T, DESCRIPTOR > &sLattice, UnitConverter< T, DESCRIPTOR > const &converter, Particle< T, PARTICLETYPE > &particle, const Vector< bool, DESCRIPTOR::d > &periodicity) |
| Set particle field with peridic support. | |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE , typename PARTICLECONTACTTYPE , typename WALLCONTACTTYPE , typename F > | |
| void | setSuperParticleField (const SuperGeometry< T, DESCRIPTOR::d > &sGeometry, const PhysR< T, DESCRIPTOR::d > &min, const PhysR< T, DESCRIPTOR::d > &max, SuperLattice< T, DESCRIPTOR > &sLattice, UnitConverter< T, DESCRIPTOR > const &converter, ParticleSystem< T, PARTICLETYPE > &particleSystem, contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > &particleContacts, size_t iP, Particle< T, PARTICLETYPE > &particle, std::vector< SolidBoundary< T, DESCRIPTOR::d > > &solidBoundaries, F getSetupPeriodicity, int globiC=-1) |
| template<typename T , typename DESCRIPTOR > | |
| void | resetSuperParticleField (SuperGeometry< T, DESCRIPTOR::d > &sGeometry, SuperLattice< T, DESCRIPTOR > &sLattice) |
| Reset particle field. | |
| template<typename T , typename DESCRIPTOR > | |
| void | resetContactField (SuperGeometry< T, DESCRIPTOR::d > &sGeometry, SuperLattice< T, DESCRIPTOR > &sLattice) |
| using olb::particles::apply_gravity |
Definition at line 356 of file particleTasks.h.
| using olb::particles::communicate_parallel_surface_force = communicate_surface_force<T,PARTICLETYPE> |
Definition at line 363 of file particleTasks.h.
| using olb::particles::couple_lattice_to_particles |
Aliases.
Definition at line 329 of file particleTasks.h.
| using olb::particles::couple_particles_to_lattice |
Definition at line 342 of file particleTasks.h.
| using olb::particles::process_dynamics |
Definition at line 349 of file particleTasks.h.
| using olb::particles::XParticleSystem |
Definition at line 74 of file superParticleSystem.h.
| void olb::particles::checkSmoothIndicatorOutOfGeometry | ( | bool & | outOfGeometry, |
| Vector< T, D > & | ghostPos, | ||
| const PhysR< T, D > & | cellMin, | ||
| const PhysR< T, D > & | cellMax, | ||
| const Vector< T, D > & | position, | ||
| T | circumRadius, | ||
| const Vector< bool, D > & | periodic ) |
 Here is the caller graph for this function:
Here is the caller graph for this function:| void olb::particles::checkSmoothIndicatorOutOfGeometry | ( | bool & | surfaceOutOfGeometry, |
| PhysR< T, D > & | ghostPos, | ||
| const PhysR< T, D > & | cellMin, | ||
| const PhysR< T, D > & | cellMax, | ||
| const PhysR< T, D > & | position, | ||
| T | circumRadius, | ||
| const Vector< bool, D > & | periodic ) |
Definition at line 68 of file blockLatticeInteraction.hh.
References olb::particles::communication::movePositionToEnd(), and olb::particles::communication::movePositionToStart().
Here is the call graph for this function:| std::array< Vector< T, 2 >, 8 > olb::particles::discretePointsOnSphericalHull | ( | Vector< T, 2 > | position, |
| T | radius ) |
Definition at line 100 of file particleUtilities.h.
| std::array< Vector< T, 3 >, 26 > olb::particles::discretePointsOnSphericalHull | ( | Vector< T, 3 > | position, |
| T | radius ) |
Definition at line 47 of file particleUtilities.h.
Here is the caller graph for this function:| void olb::particles::doForParticle | ( | Particle< T, PARTICLETYPE > & | particle, |
| F | f ) |
Definition at line 37 of file lambdaLoops.h.
Here is the caller graph for this function:| void olb::particles::doForParticleMatchingID | ( | XParticleSystem< T, PARTICLETYPE > & | xParticleSystem, |
| F | f ) |
Definition at line 189 of file particleUtilities.h.
References doForParticleMatchingID().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::doWhenMeetingCondition | ( | Particle< T, PARTICLETYPE > & | particle, |
| F | f ) |
Definition at line 55 of file lambdaLoops.h.
References doForParticle().
Here is the call graph for this function:| void olb::particles::doWhenMeetingCondition | ( | Particle< T, PARTICLETYPE > & | particle, |
| F | f, | ||
| int | globiC ) |
Definition at line 82 of file lambdaLoops.h.
References doForParticle().
Here is the call graph for this function:| void olb::particles::forParticlesInParticleSystem | ( | ParticleSystem< T, PARTICLETYPE > & | particleSystem, |
| F | f ) |
Definition at line 135 of file lambdaLoops.h.
References olb::particles::ParticleSystem< T, PARTICLETYPE >::get(), and olb::particles::ParticleSystem< T, PARTICLETYPE >::size().
Here is the call graph for this function:| void olb::particles::forParticlesInParticleSystem | ( | ParticleSystem< T, PARTICLETYPE > & | particleSystem, |
| F | f, | ||
| int | globiC ) |
Definition at line 118 of file lambdaLoops.h.
References olb::particles::ParticleSystem< T, PARTICLETYPE >::get(), and olb::particles::ParticleSystem< T, PARTICLETYPE >::size().
Here is the call graph for this function:| void olb::particles::forParticlesInXParticleSystem | ( | XParticleSystem< T, PARTICLETYPE > & | xParticleSystem, |
| F | f ) |
Iterate over particles in x particle system.
Definition at line 227 of file lambdaLoops.h.
References olb::particles::communication::forSystemsInSuperParticleSystem().
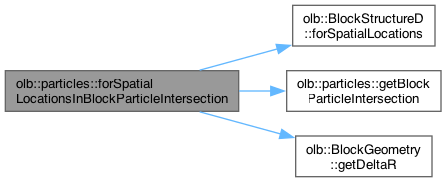
Here is the call graph for this function:| void olb::particles::forSpatialLocationsInBlockParticleIntersection | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice, | ||
| int | padding, | ||
| Vector< T, DESCRIPTOR::d > | position, | ||
| T | circumRadius, | ||
| F | f ) |
Definition at line 195 of file blockLatticeInteraction.hh.
References olb::BlockStructureD< D >::forSpatialLocations(), getBlockParticleIntersection(), and olb::BlockGeometry< T, D >::getDeltaR().
Here is the call graph for this function:| void olb::particles::forSpatialLocationsInBlockParticleIntersection | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice, | ||
| Vector< T, DESCRIPTOR::d > | position, | ||
| T | circumRadius, | ||
| F | f ) |
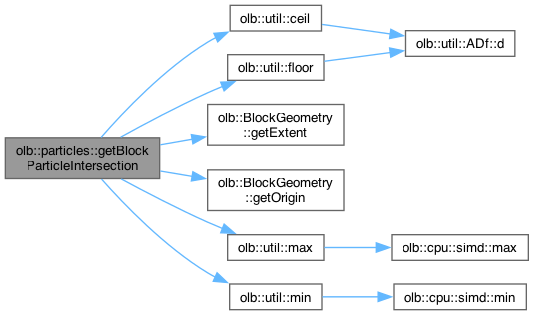
Here is the caller graph for this function:| bool olb::particles::getBlockParticleIntersection | ( | const BlockGeometry< T, D > & | blockGeometry, |
| T | invDeltaX, | ||
| LatticeR< D > & | start, | ||
| LatticeR< D > & | end, | ||
| PhysR< T, D > | position, | ||
| T | circumRadius ) |
Setting block bounds excluding(!) padding
Calculate relative start/end in block domain
Set latticeR start/end and check validity
Definition at line 39 of file blockLatticeInteraction.hh.
References olb::util::ceil(), olb::util::floor(), olb::BlockGeometry< T, D >::getExtent(), olb::BlockGeometry< T, D >::getOrigin(), olb::util::max(), and olb::util::min().
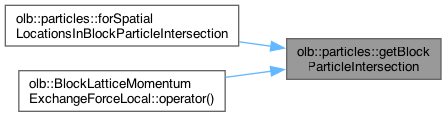
Here is the call graph for this function:| bool olb::particles::getBlockParticleIntersection | ( | const BlockGeometry< T, D > & | blockGeometry, |
| T | invDeltaX, | ||
| LatticeR< D > & | start, | ||
| LatticeR< D > & | end, | ||
| Vector< T, D > | position, | ||
| T | circumRadius ) |
Here is the caller graph for this function:
|
constexpr |
Definition at line 42 of file particleDynamicsFunctions.h.
References isPeriodic().
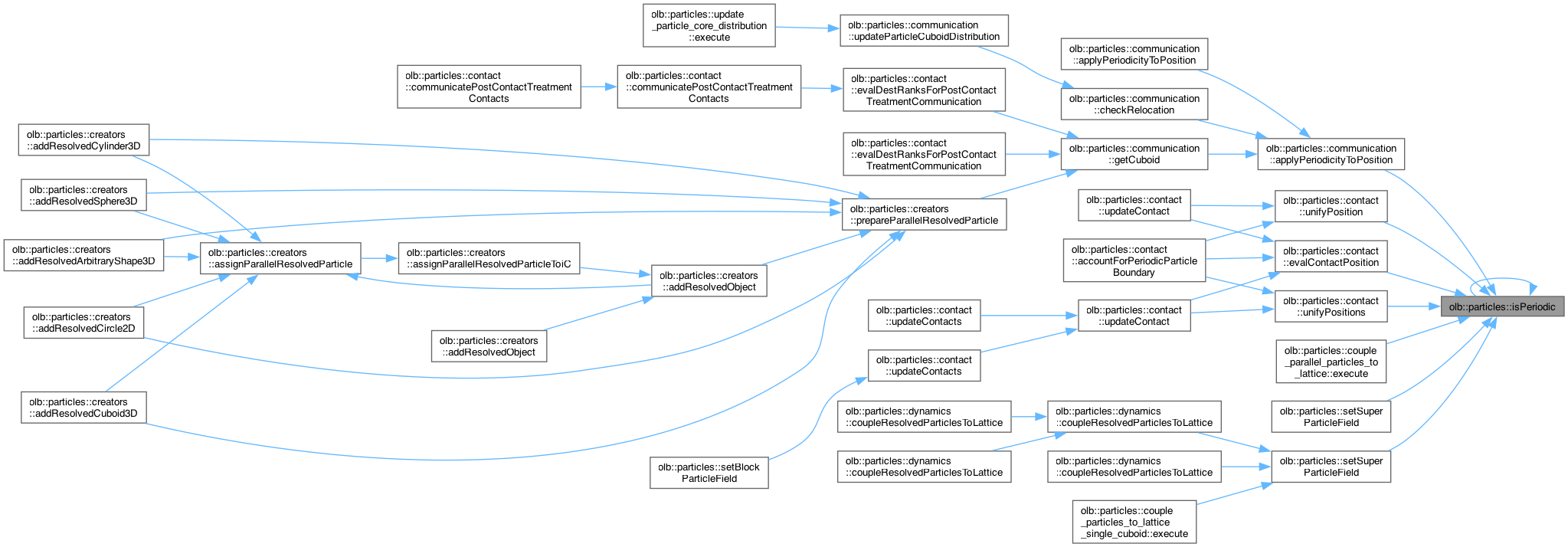
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::purgeInvalidParticles | ( | XParticleSystem< T, PARTICLETYPE > & | xParticleSystem | ) |
Definition at line 146 of file particleUtilities.h.
References olb::particles::communication::forSystemsInSuperParticleSystem(), and olb::particles::ParticleSystem< T, PARTICLETYPE >::size().
Here is the call graph for this function:
|
inlinenoexcept |
Definition at line 82 of file porousBGKdynamics.h.
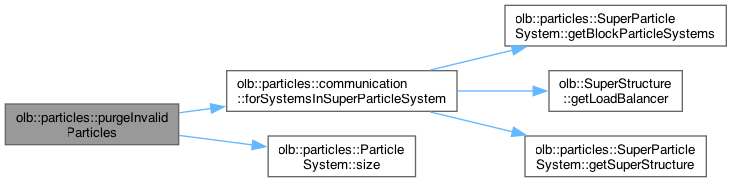
| void olb::particles::resetBlockContactField | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice ) |
Definition at line 455 of file blockLatticeInteraction.hh.
References olb::BlockStructureD< D >::forSpatialLocations(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockGeometry< T, D >::getExtent(), and olb::BlockStructureD< D >::getPadding().
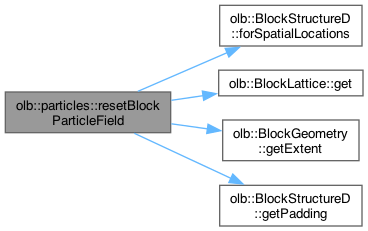
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::resetBlockParticleField | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice ) |
Definition at line 436 of file blockLatticeInteraction.hh.
References olb::BlockStructureD< D >::forSpatialLocations(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockGeometry< T, D >::getExtent(), and olb::BlockStructureD< D >::getPadding().
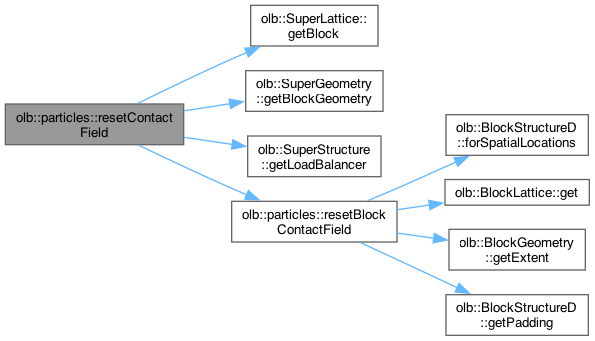
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::resetContactField | ( | SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, |
| SuperLattice< T, DESCRIPTOR > & | sLattice ) |
Definition at line 102 of file superLatticeInteraction.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), olb::SuperGeometry< T, D >::getBlockGeometry(), olb::SuperStructure< T, D >::getLoadBalancer(), and resetBlockContactField().
Here is the call graph for this function:
|
inlinenoexcept |
Definition at line 71 of file porousBGKdynamics.h.
|
inlinenoexcept |
Definition at line 47 of file porousBGKdynamics.h.
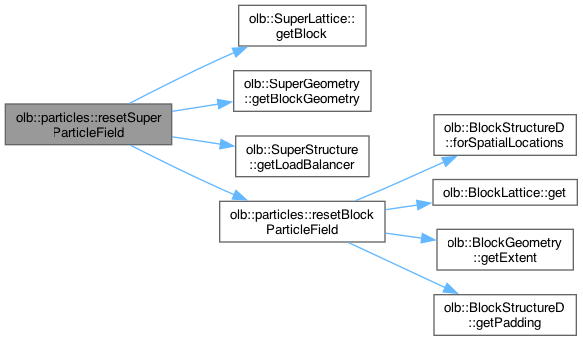
| void olb::particles::resetSuperParticleField | ( | SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, |
| SuperLattice< T, DESCRIPTOR > & | sLattice ) |
Reset particle field.
Definition at line 92 of file superLatticeInteraction.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), olb::SuperGeometry< T, D >::getBlockGeometry(), olb::SuperStructure< T, D >::getLoadBalancer(), and resetBlockParticleField().
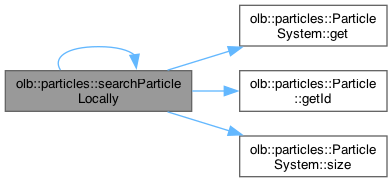
Here is the call graph for this function:| bool olb::particles::searchParticleLocally | ( | ParticleSystem< T, PARTICLETYPE > & | particleSystem, |
| std::size_t | globalIDrequested, | ||
| std::size_t & | localParticleID ) |
Definition at line 202 of file particleUtilities.h.
References olb::particles::ParticleSystem< T, PARTICLETYPE >::get(), olb::particles::Particle< T, PARTICLETYPE >::getId(), searchParticleLocally(), and olb::particles::ParticleSystem< T, PARTICLETYPE >::size().
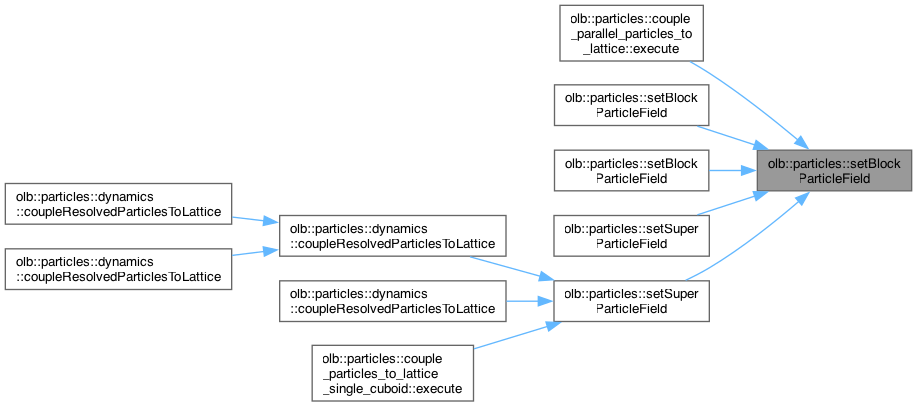
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::setBlockParticleField | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| const PhysR< T, DESCRIPTOR::d > & | cellMin, | ||
| const PhysR< T, DESCRIPTOR::d > & | cellMax, | ||
| Particle< T, PARTICLETYPE > & | particle, | ||
| const Vector< bool, DESCRIPTOR::d > & | periodic ) |
Definition at line 95 of file blockLatticeInteraction.hh.
References checkSmoothIndicatorOutOfGeometry(), olb::particles::access::getPosition(), olb::particles::access::getRadius(), and setBlockParticleField().
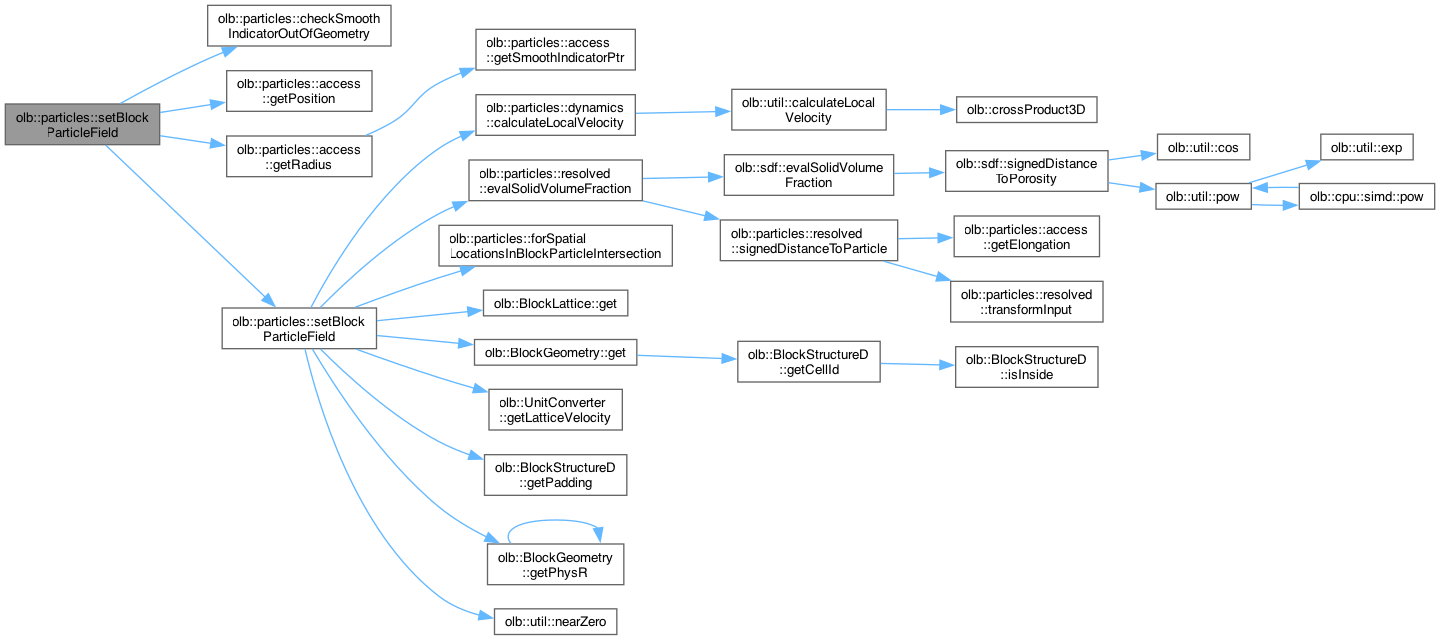
Here is the call graph for this function:| void olb::particles::setBlockParticleField | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| const PhysR< T, DESCRIPTOR::d > & | cellMin, | ||
| const PhysR< T, DESCRIPTOR::d > & | cellMax, | ||
| ParticleSystem< T, PARTICLETYPE > & | particleSystem, | ||
| contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > & | contactContainer, | ||
| size_t | iP, | ||
| Particle< T, PARTICLETYPE > & | particle, | ||
| std::vector< SolidBoundary< T, DESCRIPTOR::d > > & | solidBoundaries, | ||
| F | getSetupPeriodicity ) |
Definition at line 147 of file blockLatticeInteraction.hh.
References checkSmoothIndicatorOutOfGeometry(), olb::particles::access::getPosition(), olb::particles::access::getRadius(), and setBlockParticleField().
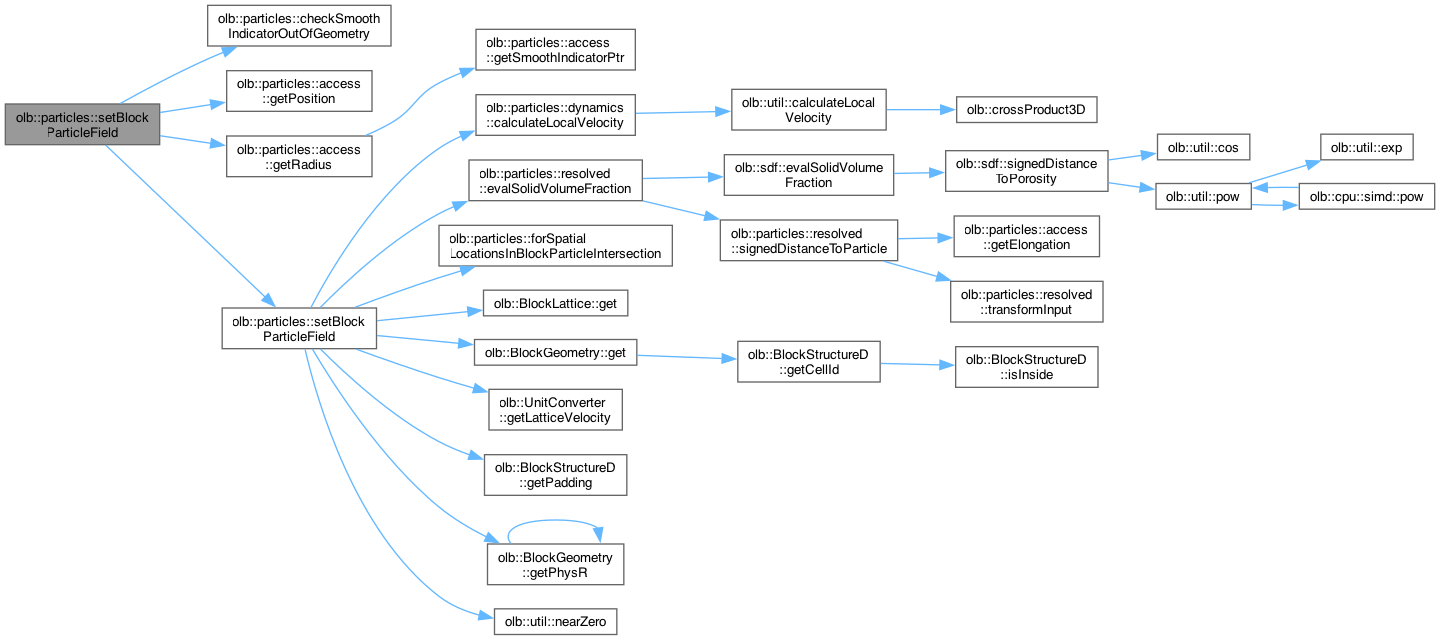
Here is the call graph for this function:| void olb::particles::setBlockParticleField | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| Particle< T, PARTICLETYPE > & | particle ) |
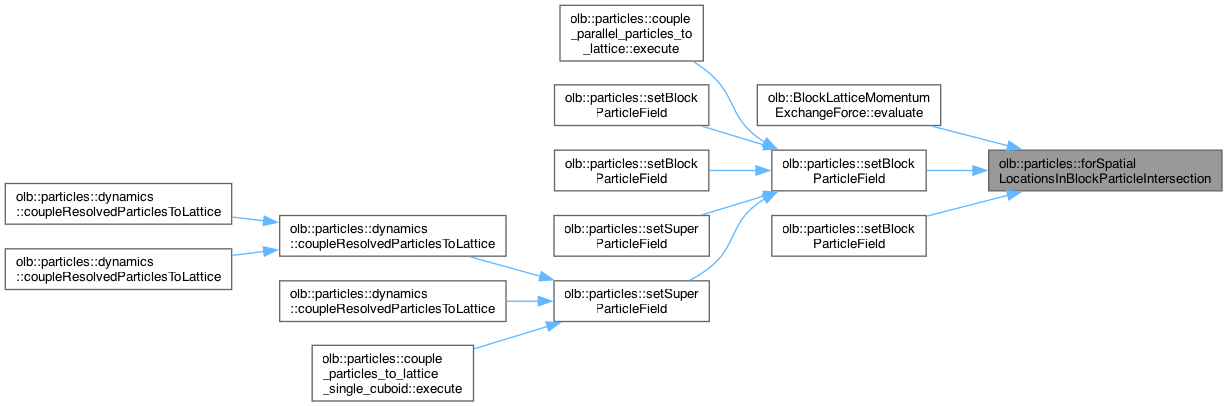
Definition at line 220 of file blockLatticeInteraction.hh.
References olb::particles::dynamics::calculateLocalVelocity(), olb::particles::resolved::evalSolidVolumeFraction(), forSpatialLocationsInBlockParticleIntersection(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockGeometry< T, D >::get(), olb::UnitConverter< T, DESCRIPTOR >::getLatticeVelocity(), olb::BlockStructureD< D >::getPadding(), olb::BlockGeometry< T, D >::getPhysR(), and olb::util::nearZero().
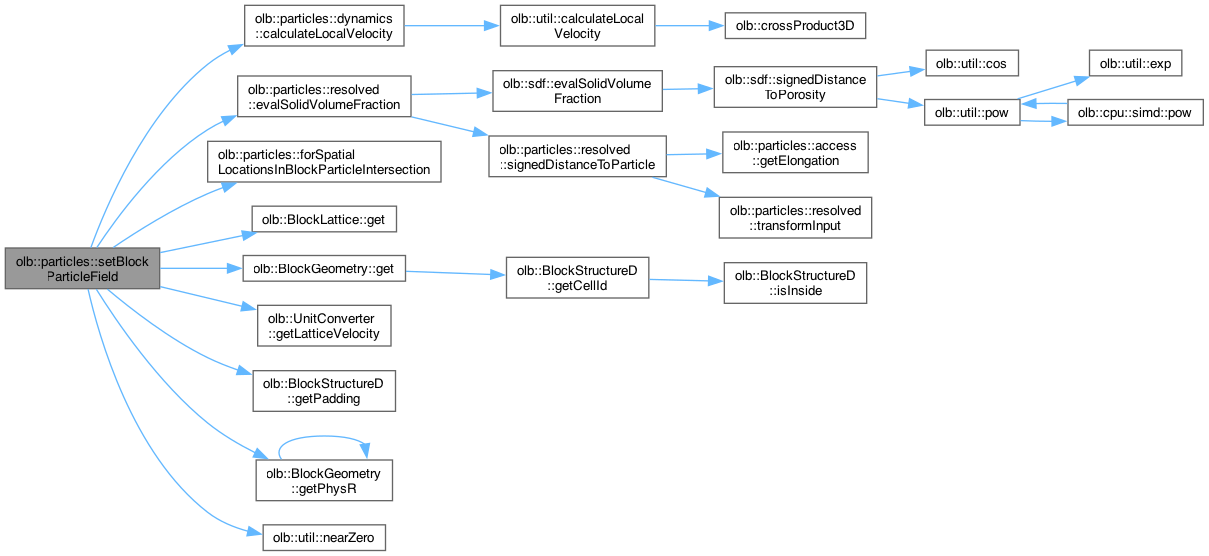
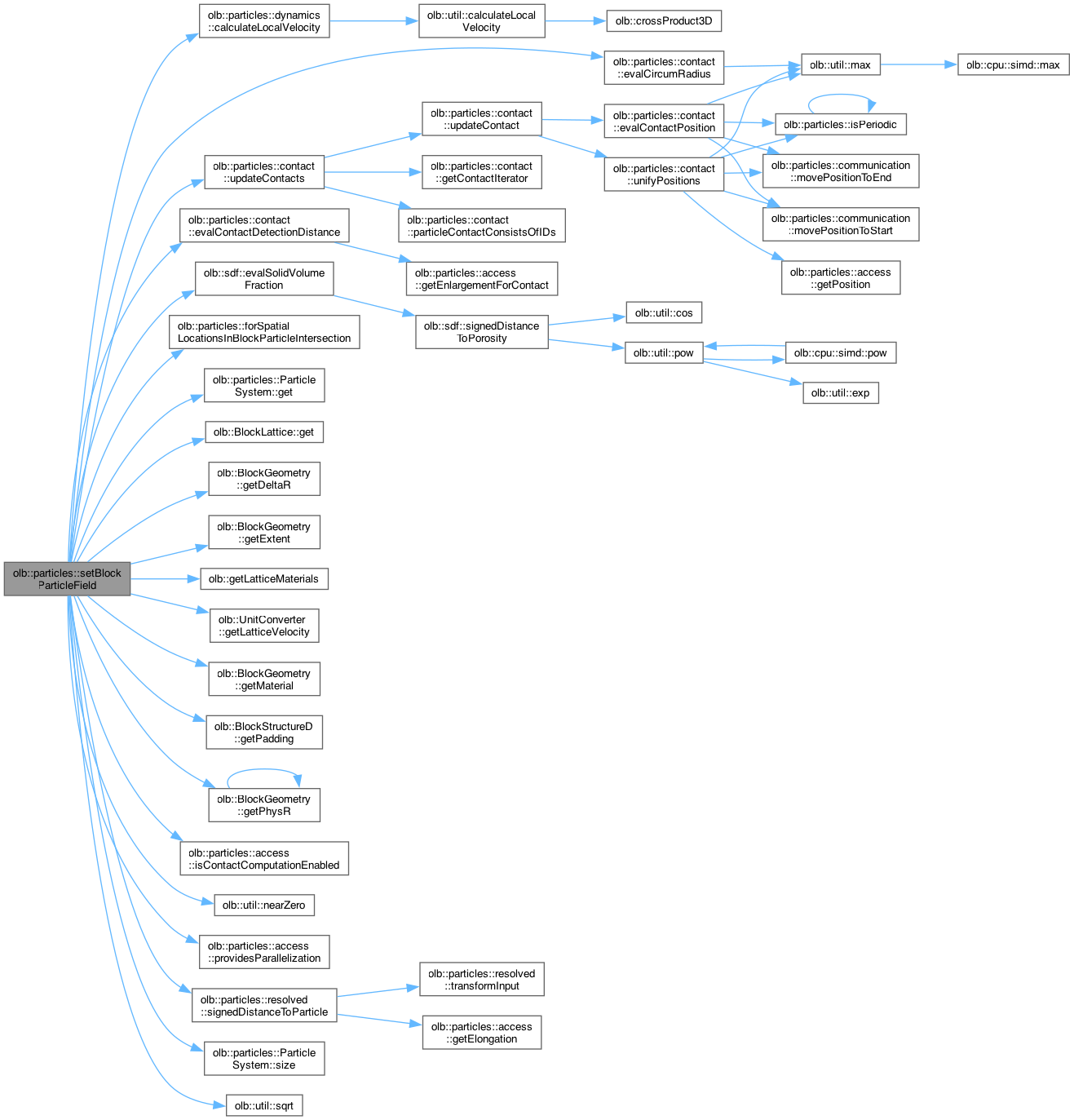
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::setBlockParticleField | ( | const BlockGeometry< T, DESCRIPTOR::d > & | blockGeometry, |
| BlockLattice< T, DESCRIPTOR > & | blockLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| ParticleSystem< T, PARTICLETYPE > & | particleSystem, | ||
| contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > & | particleContacts, | ||
| size_t | iP, | ||
| Particle< T, PARTICLETYPE > & | particle, | ||
| std::vector< SolidBoundary< T, DESCRIPTOR::d > > & | solidBoundaries, | ||
| const PhysR< T, DESCRIPTOR::d > & | cellMin = PhysR<T, DESCRIPTOR::d>(std::numeric_limits<T>::quiet_NaN()), | ||
| const PhysR< T, DESCRIPTOR::d > & | cellMax = PhysR<T, DESCRIPTOR::d>(std::numeric_limits<T>::quiet_NaN()), | ||
| F | getSetupPeriodicity = defaults::periodicity<PARTICLETYPE::d> ) |
Definition at line 281 of file blockLatticeInteraction.hh.
References olb::particles::dynamics::calculateLocalVelocity(), olb::particles::contact::evalCircumRadius(), olb::particles::contact::evalContactDetectionDistance(), olb::sdf::evalSolidVolumeFraction(), forSpatialLocationsInBlockParticleIntersection(), olb::particles::ParticleSystem< T, PARTICLETYPE >::get(), olb::BlockLattice< T, DESCRIPTOR >::get(), olb::BlockGeometry< T, D >::getDeltaR(), olb::BlockGeometry< T, D >::getExtent(), olb::getLatticeMaterials(), olb::UnitConverter< T, DESCRIPTOR >::getLatticeVelocity(), olb::BlockGeometry< T, D >::getMaterial(), olb::BlockStructureD< D >::getPadding(), olb::BlockGeometry< T, D >::getPhysR(), olb::particles::access::isContactComputationEnabled(), olb::util::nearZero(), olb::particles::access::providesParallelization(), olb::particles::resolved::signedDistanceToParticle(), olb::particles::ParticleSystem< T, PARTICLETYPE >::size(), olb::util::sqrt(), and olb::particles::contact::updateContacts().
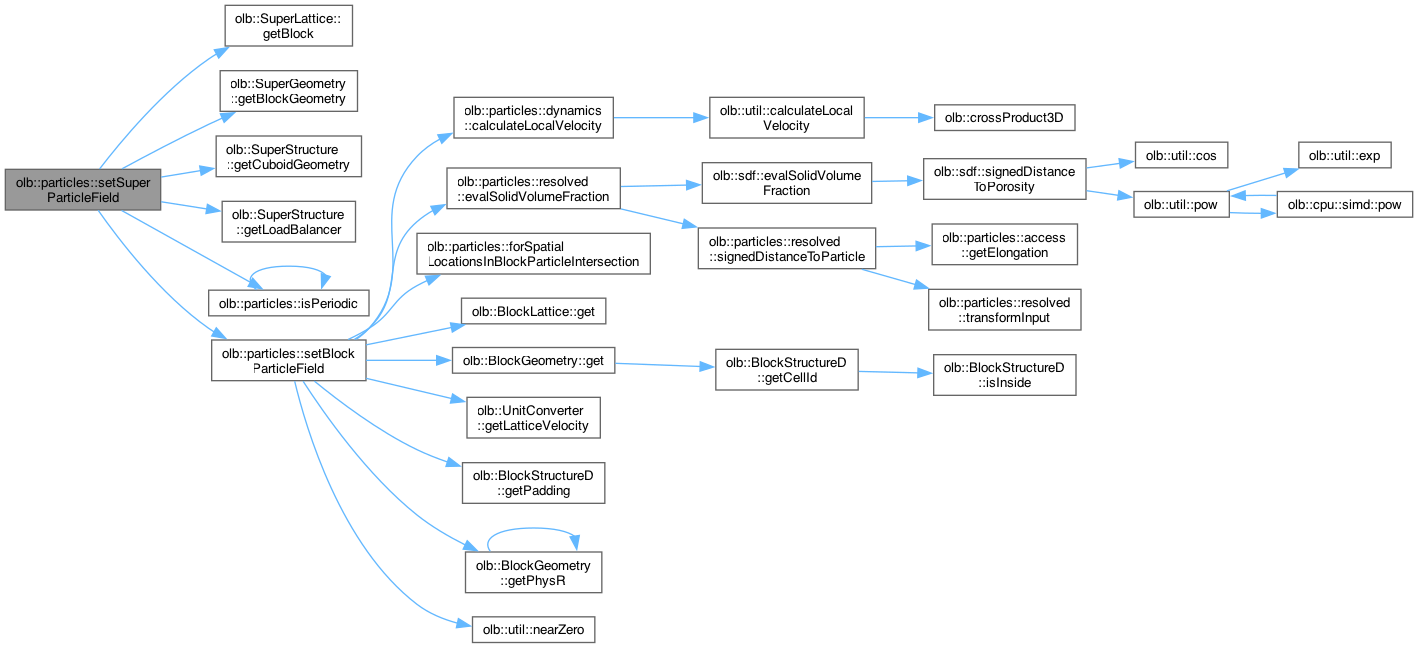
Here is the call graph for this function:| void olb::particles::setSuperParticleField | ( | const SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, |
| const PhysR< T, DESCRIPTOR::d > & | min, | ||
| const PhysR< T, DESCRIPTOR::d > & | max, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| ParticleSystem< T, PARTICLETYPE > & | particleSystem, | ||
| contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > & | particleContacts, | ||
| size_t | iP, | ||
| Particle< T, PARTICLETYPE > & | particle, | ||
| std::vector< SolidBoundary< T, DESCRIPTOR::d > > & | solidBoundaries, | ||
| F | getSetupPeriodicity, | ||
| int | globiC = -1 ) |
Definition at line 60 of file superLatticeInteraction.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), olb::SuperGeometry< T, D >::getBlockGeometry(), olb::SuperStructure< T, D >::getLoadBalancer(), isPeriodic(), and setBlockParticleField().
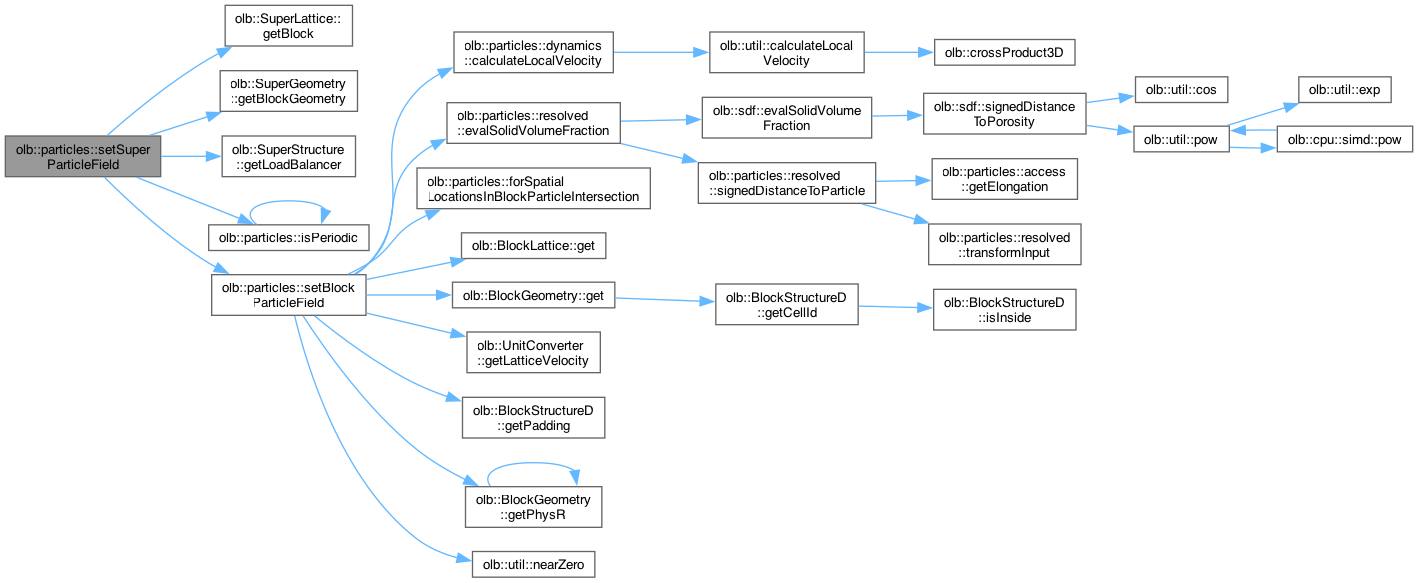
Here is the call graph for this function:| void olb::particles::setSuperParticleField | ( | const SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, |
| SuperLattice< T, DESCRIPTOR > & | sLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| Particle< T, PARTICLETYPE > & | particle, | ||
| const Vector< bool, DESCRIPTOR::d > & | periodicity ) |
Set particle field with peridic support.
Definition at line 34 of file superLatticeInteraction.hh.
References olb::SuperLattice< T, DESCRIPTOR >::getBlock(), olb::SuperGeometry< T, D >::getBlockGeometry(), olb::SuperStructure< T, D >::getCuboidGeometry(), olb::SuperStructure< T, D >::getLoadBalancer(), isPeriodic(), and setBlockParticleField().
Here is the call graph for this function: Here is the caller graph for this function: