|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
Classes | |
| class | NoParticleDynamics |
| No particle dynamics equivalent to no lattice dynamics. More... | |
| class | ParticleDetachmentDynamics |
| Verlet dynamics for particles aware of their DYNAMIC_STATE. More... | |
| struct | ParticleDynamics |
| Basic particle dynamics. More... | |
| struct | ParticleDynamicStateAngle |
| struct | ParticleDynamicStateNoAngle |
| class | ParticleManager |
| struct | torque_from_force |
| class | VerletParticleDynamics |
| Standard dynamics for particles. More... | |
| class | VerletParticleDynamicsCubicBoundsAdhesion |
| Velocity verlet particle dynamics with limitation of position and velocity by checking domain bounds in cartesion direcion and simple adhesive force threshold allowing particles only to move when both a normal and tangential force threshold have been surpassed. More... | |
| class | VerletParticleDynamicsCubicBoundsDeposition |
| Velocity verlet particle dynamics with deposition modelling by checking domain bounds in cartesion direcion. More... | |
| class | VerletParticleDynamicsEscape |
| Standard dynamics with escape. More... | |
| class | VerletParticleDynamicsMaterialAwareEscape |
| Standard dynamics with wall capture and material number checks. More... | |
| class | VerletParticleDynamicsMaterialAwareWallCapture |
| Standard dynamics with wall capture and material number checks. More... | |
| class | VerletParticleDynamicsMaterialAwareWallCaptureAndEscape |
| Standard dynamics with wall capture nd escape and material number checks. More... | |
| class | VerletParticleDynamicsMaterialCapture |
| Standard dynamics with material capture. More... | |
| class | VerletParticleDynamicsMaterialCaptureAndEscape |
| Standard dynamics with material capture and escape. More... | |
| class | VerletParticleDynamicsMaterialEscape |
| Standard dynamics with material capture. More... | |
| class | VerletParticleDynamicsRotationOnly |
| Verlet particle dynamics only considering rotation (ignoring translation) More... | |
| class | VerletParticleDynamicsRotor |
| class | VerletParticleDynamicsTranslationOnly |
| Verlet particle dynamics only considering translation (ignoring rotation) More... | |
| class | VerletParticleDynamicsVelocityWallReflection |
| Standard dynamics with wall reflection. More... | |
| class | VerletParticleDynamicsWallCapture |
| Standard dynamics with wall capture. More... | |
Typedefs | |
| template<typename T , typename PARTICLETYPE > | |
| using | DynState |
Functions | |
| template<typename T , typename PARTICLETYPE > | |
| void | updateRotationMatrix (Particle< T, PARTICLETYPE > &particle) |
| template<typename T , typename PARTICLETYPE , typename F > | |
| void | doAtCubicBoundPenetration (Particle< T, PARTICLETYPE > &particle, Vector< T, PARTICLETYPE::d > domainMin, Vector< T, PARTICLETYPE::d > domainMax, F boundTreatment) |
| Helper functions. | |
| template<typename T , typename PARTICLETYPE > | |
| void | resetDirection (Particle< T, PARTICLETYPE > &particle, Vector< T, PARTICLETYPE::d > positionPre, int iDir) |
| template<typename T , typename PARTICLETYPE > | |
| void | resetMovement (Particle< T, PARTICLETYPE > &particle, Vector< T, PARTICLETYPE::d > positionPre, Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > anglePre=Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation >(0.)) |
| template<typename T , typename PARTICLETYPE > | |
| constexpr Vector< T, PARTICLETYPE::d > | calculateLocalVelocity (Particle< T, PARTICLETYPE > &particle, const PhysR< T, PARTICLETYPE::d > &input) |
| template<typename T , typename PARTICLETYPE > | |
| void | unserializeForceTorqueVoxels (Vector< T, PARTICLETYPE::d > &force, Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > &torque, T serializedFunctorForceField[], int iP) |
| Unserialize force field provieded by force integration functor (e.g. momentumExchange) | |
| template<typename T , typename PARTICLETYPE > | |
| void | unserializeForce (Vector< T, PARTICLETYPE::d > &force, T serializedFunctorForceField[], int iP) |
| Unserialize force field provieded by force integration functor (e.g. stokesDragForce) | |
| template<typename T , typename PARTICLETYPE , typename FORCEFUNCTOR > | |
| void | applySerializableParticleForce (FORCEFUNCTOR &forceF, ParticleSystem< T, PARTICLETYPE > &particleSystem, std::size_t iP0=0) |
| Apply boundary force provided by force functor to the particle center as torque and force. | |
| template<typename T , typename PARTICLETYPE , typename FORCEFUNCTOR , typename PCONDITION = conditions::valid_particles> | |
| void | applyLocalParticleForce (FORCEFUNCTOR &forceF, ParticleSystem< T, PARTICLETYPE > &particleSystem, std::size_t iP0=0) |
| Apply boundary force provided by force functor to the particle center as torque and force. | |
| template<typename T , typename PARTICLETYPE > | |
| void | initializeParticle (DynamicFieldGroupsD< T, typename PARTICLETYPE::fields_t > &dynamicFieldGroups, std::size_t iP) |
| Initialize all fields in particle (necessary for clang) | |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE , typename PARTICLECONTACTTYPE , typename WALLCONTACTTYPE , typename F = decltype(defaults::periodicity<DESCRIPTOR::d>)> | |
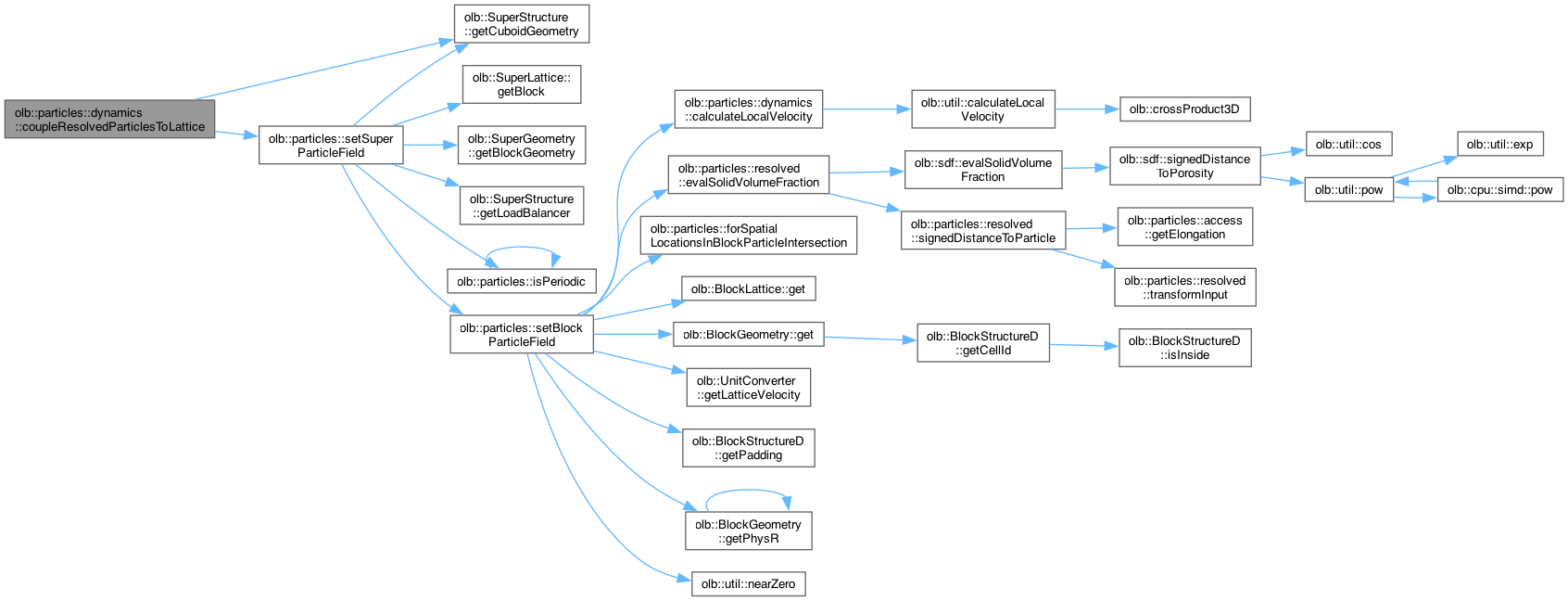
| void | coupleResolvedParticlesToLattice (ParticleSystem< T, PARTICLETYPE > &particleSystem, contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > &contactContainer, const SuperGeometry< T, DESCRIPTOR::d > &sGeometry, SuperLattice< T, DESCRIPTOR > &sLattice, UnitConverter< T, DESCRIPTOR > const &converter, std::vector< SolidBoundary< T, DESCRIPTOR::d > > &solidBoundaries, F getSetupPeriodicity=defaults::periodicity< DESCRIPTOR::d >) |
| Couple particle to lattice and detect contacts of resolved particles. | |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE , typename PARTICLECONTACTTYPE , typename WALLCONTACTTYPE , typename F = decltype(defaults::periodicity<DESCRIPTOR::d>)> | |
| void | coupleResolvedParticlesToLattice (ParticleSystem< T, PARTICLETYPE > &particleSystem, contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > &contactContainer, const SuperGeometry< T, DESCRIPTOR::d > &sGeometry, SuperLattice< T, DESCRIPTOR > &sLattice, UnitConverter< T, DESCRIPTOR > const &converter, F getSetupPeriodicity=defaults::periodicity< DESCRIPTOR::d >) |
| Couple particle to lattice and detect contacts of resolved particles. | |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE , typename PARTICLECONTACTTYPE , typename WALLCONTACTTYPE , typename F = decltype(defaults::periodicity<DESCRIPTOR::d>)> | |
| void | coupleResolvedParticlesToLattice (SuperParticleSystem< T, PARTICLETYPE > &sParticleSystem, contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > &contactContainer, const SuperGeometry< T, DESCRIPTOR::d > &sGeometry, SuperLattice< T, DESCRIPTOR > &sLattice, UnitConverter< T, DESCRIPTOR > const &converter, std::vector< SolidBoundary< T, DESCRIPTOR::d > > &solidBoundaries, F getSetupPeriodicity=defaults::periodicity< DESCRIPTOR::d >) |
| Couple particle to lattice and detect contacts of resolved particles. | |
| template<typename T , typename DESCRIPTOR , typename PARTICLETYPE , typename PARTICLECONTACTTYPE , typename WALLCONTACTTYPE , typename F = decltype(defaults::periodicity<DESCRIPTOR::d>)> | |
| void | coupleResolvedParticlesToLattice (SuperParticleSystem< T, PARTICLETYPE > &sParticleSystem, contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > &contactContainer, const SuperGeometry< T, DESCRIPTOR::d > &sGeometry, SuperLattice< T, DESCRIPTOR > &sLattice, UnitConverter< T, DESCRIPTOR > const &converter, F getSetupPeriodicity=defaults::periodicity< DESCRIPTOR::d >) |
| Couple particle to lattice and detect contacts of resolved particles. | |
| template<typename T , typename PARTICLETYPE > | |
| T | calcKineticEnergy (Particle< T, PARTICLETYPE > &particle) |
| template<typename T , typename PARTICLETYPE > | |
| void | velocityVerletTranslation (Particle< T, PARTICLETYPE > &particle, T delTime, T delTime2, Vector< T, PARTICLETYPE::d > acceleration) |
| template<typename T , typename PARTICLETYPE > | |
| void | velocityVerletRotation (Particle< T, PARTICLETYPE > &particle, T delTime, T delTime2, Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > angularAcceleration) |
| template<typename T , typename PARTICLETYPE > | |
| void | velocityVerletRotor (Particle< T, PARTICLETYPE > &particle, T delTime, Vector< T, PARTICLETYPE::d > angVel) |
| template<typename T , typename PARTICLETYPE > | |
| void | velocityVerletIntegration (Particle< T, PARTICLETYPE > &particle, T delTime, Vector< T, PARTICLETYPE::d > acceleration, Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > angularAcceleration) |
| template<typename T , typename PARTICLETYPE > | |
| void | eulerIntegrationTranslation (Particle< T, PARTICLETYPE > &particle, T delTime, Vector< T, PARTICLETYPE::d > acceleration) |
| Euler integration. | |
| template<typename T , typename PARTICLETYPE > | |
| void | eulerIntegrationRotation (Particle< T, PARTICLETYPE > &particle, T delTime, Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > angularAcceleration) |
| template<typename T , typename PARTICLETYPE > | |
| void | eulerIntegration (Particle< T, PARTICLETYPE > &particle, T delTime, Vector< T, PARTICLETYPE::d > acceleration, Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > angularAcceleration) |
| template<typename T , typename PARTICLETYPE > | |
| void | analyticalTranslation (Particle< T, PARTICLETYPE > &particle, Vector< T, PARTICLETYPE::d > acceleration, T delTime, Vector< T, PARTICLETYPE::d > fluid_vel) |
| using olb::particles::dynamics::DynState |
Definition at line 151 of file particleDynamicsUtilities.h.
| void olb::particles::dynamics::analyticalTranslation | ( | Particle< T, PARTICLETYPE > & | particle, |
| Vector< T, PARTICLETYPE::d > | acceleration, | ||
| T | delTime, | ||
| Vector< T, PARTICLETYPE::d > | fluid_vel ) |
Definition at line 195 of file particleMotionFunctions.h.
| void olb::particles::dynamics::applyLocalParticleForce | ( | FORCEFUNCTOR & | forceF, |
| ParticleSystem< T, PARTICLETYPE > & | particleSystem, | ||
| std::size_t | iP0 = 0 ) |
Apply boundary force provided by force functor to the particle center as torque and force.
Definition at line 198 of file particleDynamicsFunctions.h.
References olb::particles::ParticleSystem< T, PARTICLETYPE >::get(), and olb::particles::ParticleSystem< T, PARTICLETYPE >::size().
 Here is the call graph for this function:
Here is the call graph for this function:| void olb::particles::dynamics::applySerializableParticleForce | ( | FORCEFUNCTOR & | forceF, |
| ParticleSystem< T, PARTICLETYPE > & | particleSystem, | ||
| std::size_t | iP0 = 0 ) |
Apply boundary force provided by force functor to the particle center as torque and force.
Definition at line 151 of file particleDynamicsFunctions.h.
References olb::particles::ParticleSystem< T, PARTICLETYPE >::get(), and olb::particles::ParticleSystem< T, PARTICLETYPE >::size().
Here is the call graph for this function: Here is the caller graph for this function:| T olb::particles::dynamics::calcKineticEnergy | ( | Particle< T, PARTICLETYPE > & | particle | ) |
Definition at line 335 of file particleDynamicsFunctions.h.
Here is the caller graph for this function:
|
constexpr |
Definition at line 91 of file particleDynamicsFunctions.h.
References olb::util::calculateLocalVelocity().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::dynamics::coupleResolvedParticlesToLattice | ( | ParticleSystem< T, PARTICLETYPE > & | particleSystem, |
| contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > & | contactContainer, | ||
| const SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| F | getSetupPeriodicity = defaults::periodicity<DESCRIPTOR::d> ) |
Couple particle to lattice and detect contacts of resolved particles.
Definition at line 270 of file particleDynamicsFunctions.h.
References coupleResolvedParticlesToLattice().
Here is the call graph for this function:| void olb::particles::dynamics::coupleResolvedParticlesToLattice | ( | ParticleSystem< T, PARTICLETYPE > & | particleSystem, |
| contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > & | contactContainer, | ||
| const SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| std::vector< SolidBoundary< T, DESCRIPTOR::d > > & | solidBoundaries, | ||
| F | getSetupPeriodicity = defaults::periodicity<DESCRIPTOR::d> ) |
Couple particle to lattice and detect contacts of resolved particles.
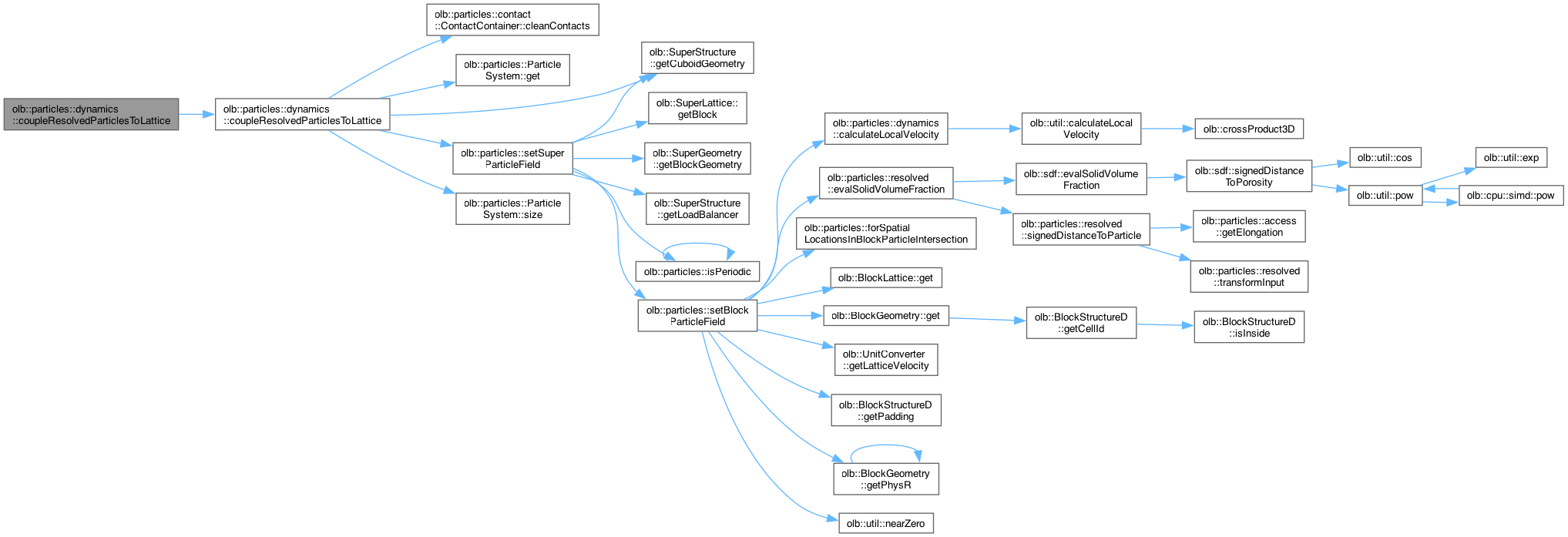
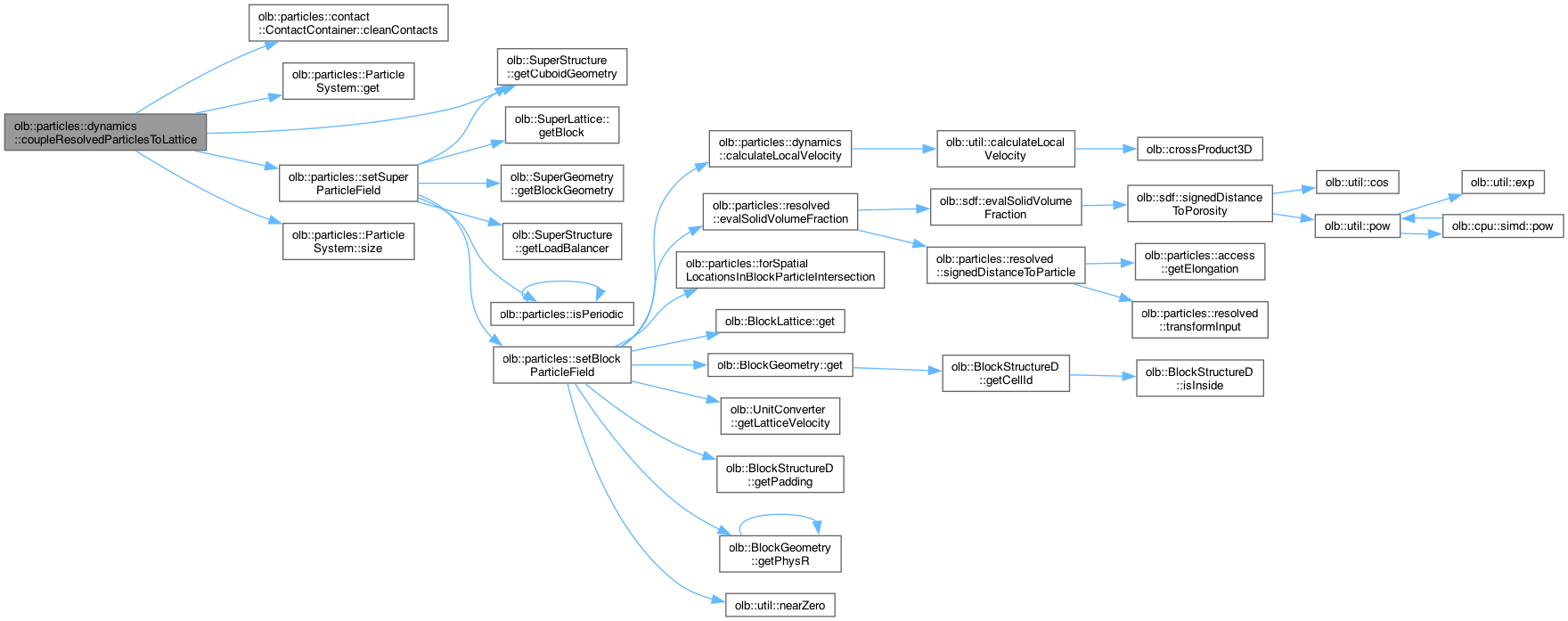
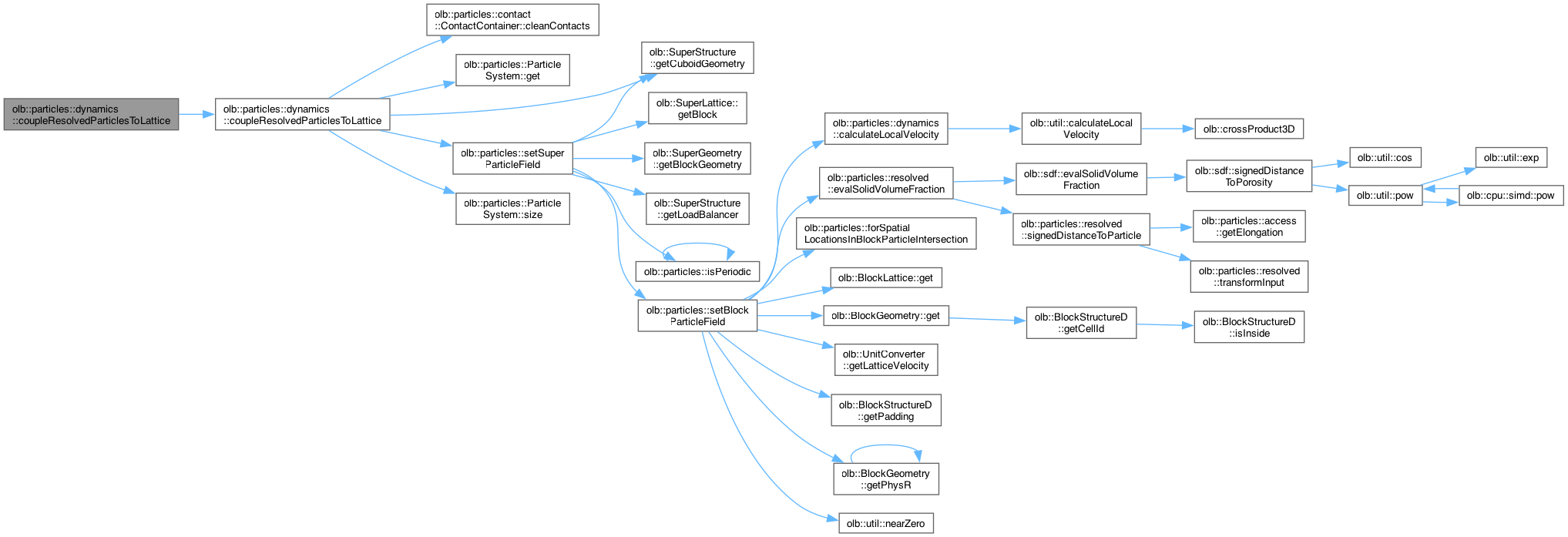
Definition at line 235 of file particleDynamicsFunctions.h.
References olb::particles::contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE >::cleanContacts(), olb::particles::ParticleSystem< T, PARTICLETYPE >::get(), olb::SuperStructure< T, D >::getCuboidGeometry(), olb::particles::setSuperParticleField(), and olb::particles::ParticleSystem< T, PARTICLETYPE >::size().
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::dynamics::coupleResolvedParticlesToLattice | ( | SuperParticleSystem< T, PARTICLETYPE > & | sParticleSystem, |
| contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > & | contactContainer, | ||
| const SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| F | getSetupPeriodicity = defaults::periodicity<DESCRIPTOR::d> ) |
Couple particle to lattice and detect contacts of resolved particles.
Definition at line 321 of file particleDynamicsFunctions.h.
References coupleResolvedParticlesToLattice().
Here is the call graph for this function:| void olb::particles::dynamics::coupleResolvedParticlesToLattice | ( | SuperParticleSystem< T, PARTICLETYPE > & | sParticleSystem, |
| contact::ContactContainer< T, PARTICLECONTACTTYPE, WALLCONTACTTYPE > & | contactContainer, | ||
| const SuperGeometry< T, DESCRIPTOR::d > & | sGeometry, | ||
| SuperLattice< T, DESCRIPTOR > & | sLattice, | ||
| UnitConverter< T, DESCRIPTOR > const & | converter, | ||
| std::vector< SolidBoundary< T, DESCRIPTOR::d > > & | solidBoundaries, | ||
| F | getSetupPeriodicity = defaults::periodicity<DESCRIPTOR::d> ) |
Couple particle to lattice and detect contacts of resolved particles.
Definition at line 286 of file particleDynamicsFunctions.h.
References olb::SuperStructure< T, D >::getCuboidGeometry(), and olb::particles::setSuperParticleField().
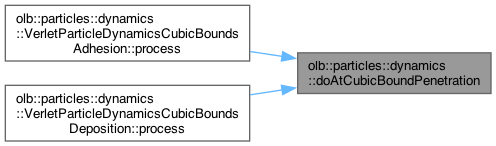
Here is the call graph for this function:| void olb::particles::dynamics::doAtCubicBoundPenetration | ( | Particle< T, PARTICLETYPE > & | particle, |
| Vector< T, PARTICLETYPE::d > | domainMin, | ||
| Vector< T, PARTICLETYPE::d > | domainMax, | ||
| F | boundTreatment ) |
Helper functions.
Definition at line 59 of file particleDynamicsUtilities.h.
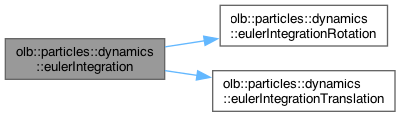
Here is the caller graph for this function:| void olb::particles::dynamics::eulerIntegration | ( | Particle< T, PARTICLETYPE > & | particle, |
| T | delTime, | ||
| Vector< T, PARTICLETYPE::d > | acceleration, | ||
| Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > | angularAcceleration ) |
Definition at line 180 of file particleMotionFunctions.h.
References eulerIntegrationRotation(), and eulerIntegrationTranslation().
Here is the call graph for this function:| void olb::particles::dynamics::eulerIntegrationRotation | ( | Particle< T, PARTICLETYPE > & | particle, |
| T | delTime, | ||
| Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > | angularAcceleration ) |
Definition at line 160 of file particleMotionFunctions.h.
Here is the caller graph for this function:| void olb::particles::dynamics::eulerIntegrationTranslation | ( | Particle< T, PARTICLETYPE > & | particle, |
| T | delTime, | ||
| Vector< T, PARTICLETYPE::d > | acceleration ) |
Euler integration.
Definition at line 142 of file particleMotionFunctions.h.
Here is the caller graph for this function:| void olb::particles::dynamics::initializeParticle | ( | DynamicFieldGroupsD< T, typename PARTICLETYPE::fields_t > & | dynamicFieldGroups, |
| std::size_t | iP ) |
Initialize all fields in particle (necessary for clang)
Definition at line 215 of file particleDynamicsFunctions.h.
| void olb::particles::dynamics::resetDirection | ( | Particle< T, PARTICLETYPE > & | particle, |
| Vector< T, PARTICLETYPE::d > | positionPre, | ||
| int | iDir ) |
Definition at line 84 of file particleDynamicsUtilities.h.
Here is the caller graph for this function:| void olb::particles::dynamics::resetMovement | ( | Particle< T, PARTICLETYPE > & | particle, |
| Vector< T, PARTICLETYPE::d > | positionPre, | ||
| Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > | anglePre = Vector<T,utilities::dimensions::convert<PARTICLETYPE::d>::rotation>(0.) ) |
Definition at line 98 of file particleDynamicsUtilities.h.
Here is the caller graph for this function:| void olb::particles::dynamics::unserializeForce | ( | Vector< T, PARTICLETYPE::d > & | force, |
| T | serializedFunctorForceField[], | ||
| int | iP ) |
Unserialize force field provieded by force integration functor (e.g. stokesDragForce)
Definition at line 134 of file particleDynamicsFunctions.h.
| void olb::particles::dynamics::unserializeForceTorqueVoxels | ( | Vector< T, PARTICLETYPE::d > & | force, |
| Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > & | torque, | ||
| T | serializedFunctorForceField[], | ||
| int | iP ) |
Unserialize force field provieded by force integration functor (e.g. momentumExchange)
Definition at line 110 of file particleDynamicsFunctions.h.
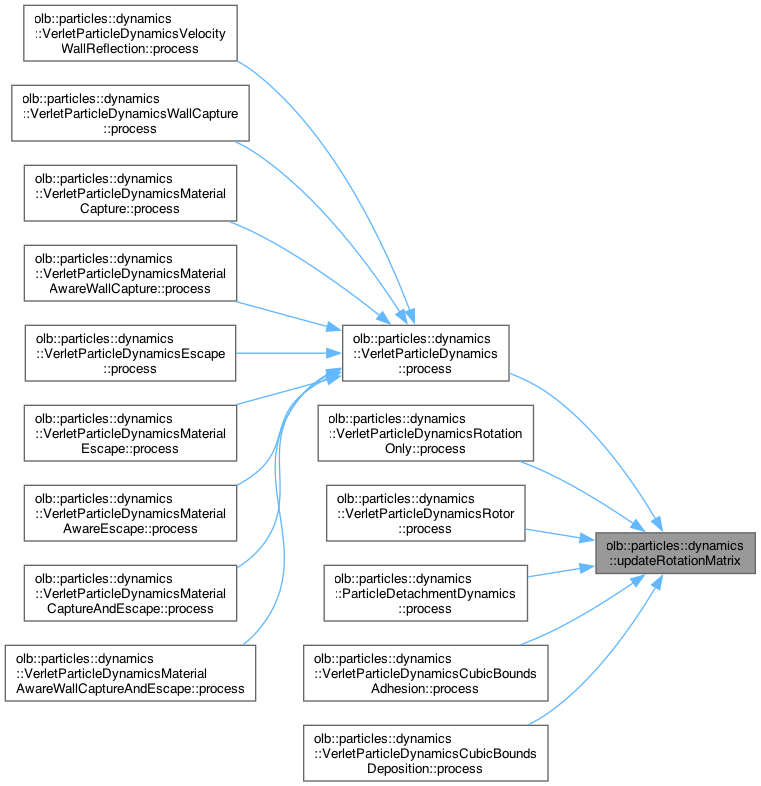
| void olb::particles::dynamics::updateRotationMatrix | ( | Particle< T, PARTICLETYPE > & | particle | ) |
Definition at line 40 of file particleDynamicsUtilities.h.
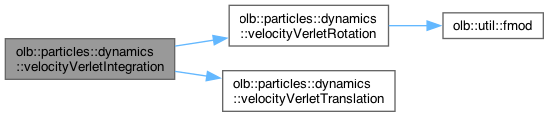
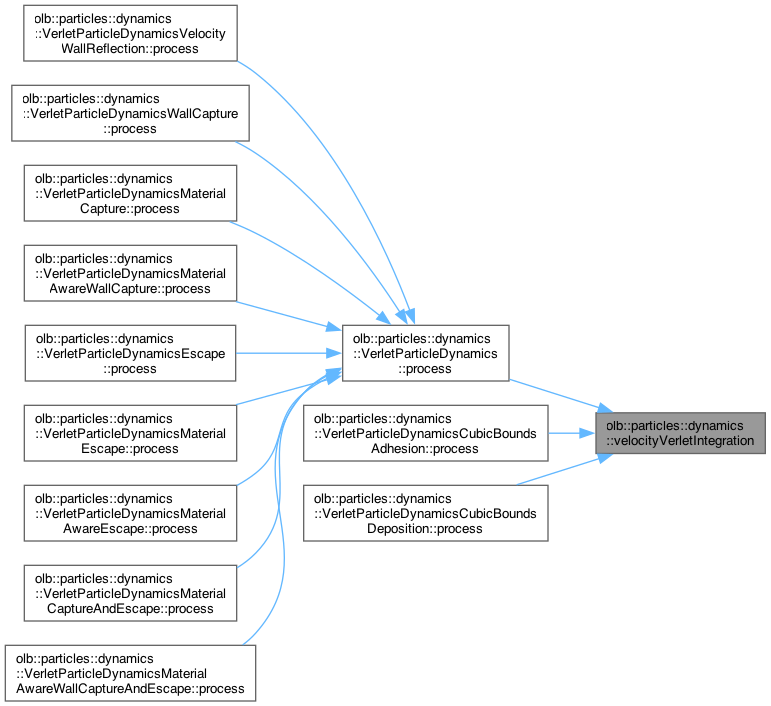
Here is the caller graph for this function:| void olb::particles::dynamics::velocityVerletIntegration | ( | Particle< T, PARTICLETYPE > & | particle, |
| T | delTime, | ||
| Vector< T, PARTICLETYPE::d > | acceleration, | ||
| Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > | angularAcceleration ) |
Definition at line 122 of file particleMotionFunctions.h.
References velocityVerletRotation(), and velocityVerletTranslation().
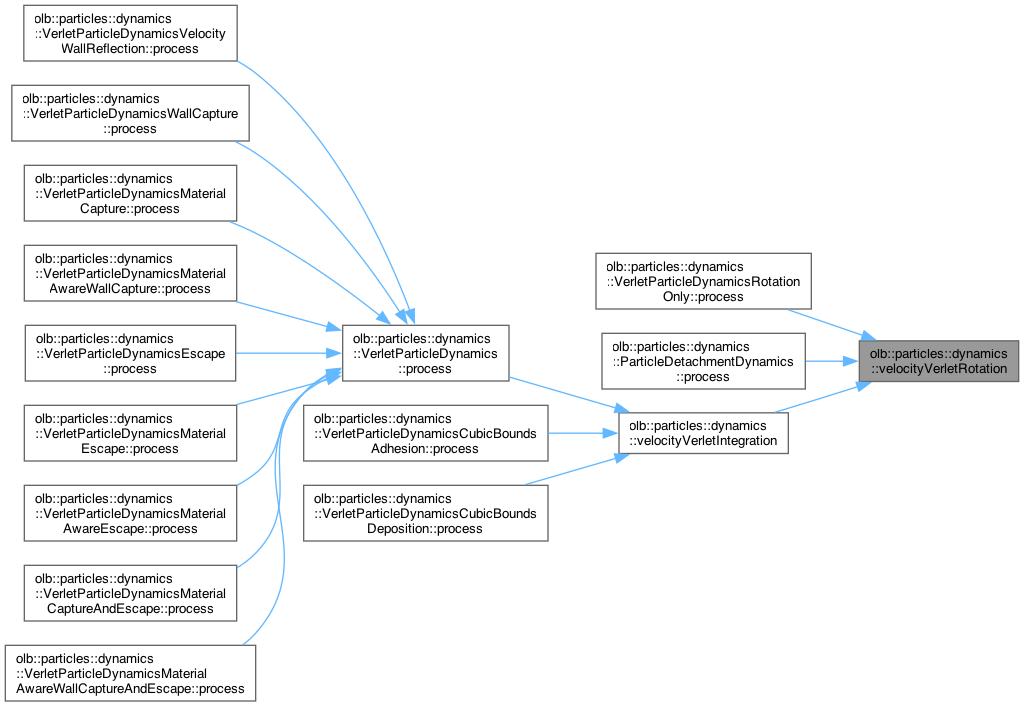
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::dynamics::velocityVerletRotation | ( | Particle< T, PARTICLETYPE > & | particle, |
| T | delTime, | ||
| T | delTime2, | ||
| Vector< T, utilities::dimensions::convert< PARTICLETYPE::d >::rotation > | angularAcceleration ) |
Definition at line 67 of file particleMotionFunctions.h.
References olb::util::fmod(), and M_PI.
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::dynamics::velocityVerletRotor | ( | Particle< T, PARTICLETYPE > & | particle, |
| T | delTime, | ||
| Vector< T, PARTICLETYPE::d > | angVel ) |
Definition at line 96 of file particleMotionFunctions.h.
References olb::util::fmod(), and M_PI.
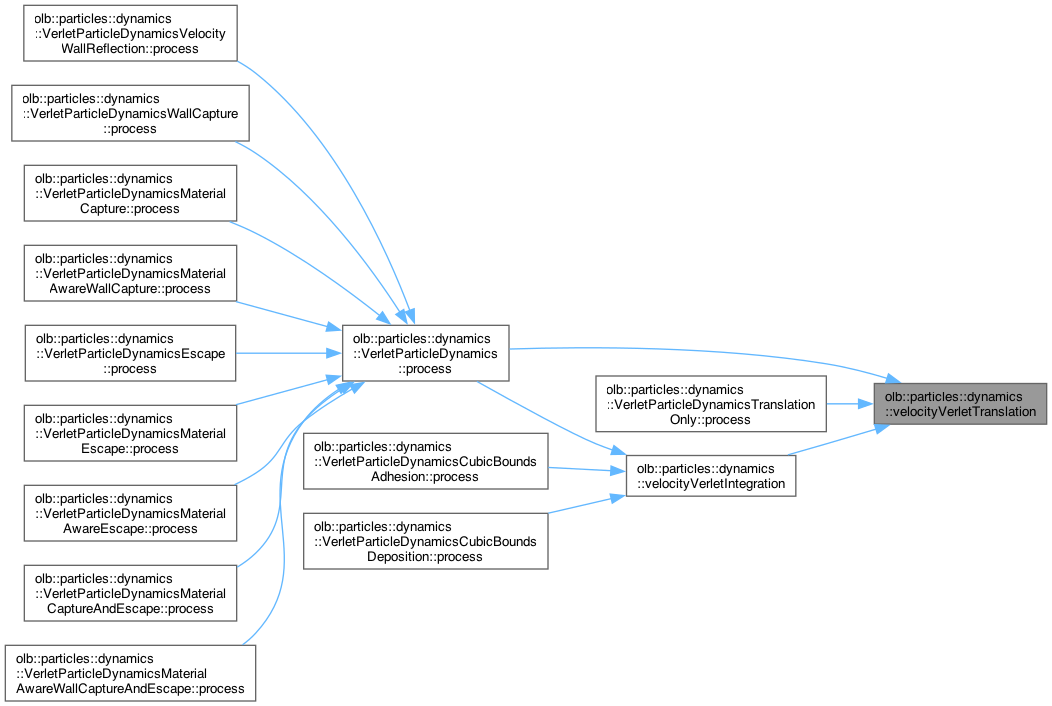
Here is the call graph for this function: Here is the caller graph for this function:| void olb::particles::dynamics::velocityVerletTranslation | ( | Particle< T, PARTICLETYPE > & | particle, |
| T | delTime, | ||
| T | delTime2, | ||
| Vector< T, PARTICLETYPE::d > | acceleration ) |
Definition at line 45 of file particleMotionFunctions.h.
Here is the caller graph for this function: