|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
Velocity verlet particle dynamics with limitation of position and velocity by checking domain bounds in cartesion direcion and simple adhesive force threshold allowing particles only to move when both a normal and tangential force threshold have been surpassed. More...
#include <particleDynamicsBase.h>
 Inheritance diagram for olb::particles::dynamics::VerletParticleDynamicsCubicBoundsAdhesion< T, PARTICLETYPE >: Collaboration diagram for olb::particles::dynamics::VerletParticleDynamicsCubicBoundsAdhesion< T, PARTICLETYPE >:
Inheritance diagram for olb::particles::dynamics::VerletParticleDynamicsCubicBoundsAdhesion< T, PARTICLETYPE >: Collaboration diagram for olb::particles::dynamics::VerletParticleDynamicsCubicBoundsAdhesion< T, PARTICLETYPE >:Public Member Functions | |
| VerletParticleDynamicsCubicBoundsAdhesion (PhysR< T, PARTICLETYPE::d > &domainMin, PhysR< T, PARTICLETYPE::d > &domainMax) | |
| Constructor. | |
| void | process (Particle< T, PARTICLETYPE > &particle, T timeStepSize) override |
| Procesisng step. | |
| Public Member Functions inherited from olb::particles::dynamics::ParticleDynamics< T, PARTICLETYPE > | |
| virtual | ~ParticleDynamics () |
| Destructor: virtual to enable inheritance. | |
| std::string & | getName () |
| read and write access to name | |
| std::string const & | getName () const |
| read only access to name | |
Velocity verlet particle dynamics with limitation of position and velocity by checking domain bounds in cartesion direcion and simple adhesive force threshold allowing particles only to move when both a normal and tangential force threshold have been surpassed.
Definition at line 278 of file particleDynamicsBase.h.
| olb::particles::dynamics::VerletParticleDynamicsCubicBoundsAdhesion< T, PARTICLETYPE >::VerletParticleDynamicsCubicBoundsAdhesion | ( | PhysR< T, PARTICLETYPE::d > & | domainMin, |
| PhysR< T, PARTICLETYPE::d > & | domainMax ) |
Constructor.
Definition at line 437 of file particleDynamicsBase.hh.
References olb::particles::dynamics::ParticleDynamics< T, PARTICLETYPE >::getName().
Here is the call graph for this function:
|
overridevirtual |
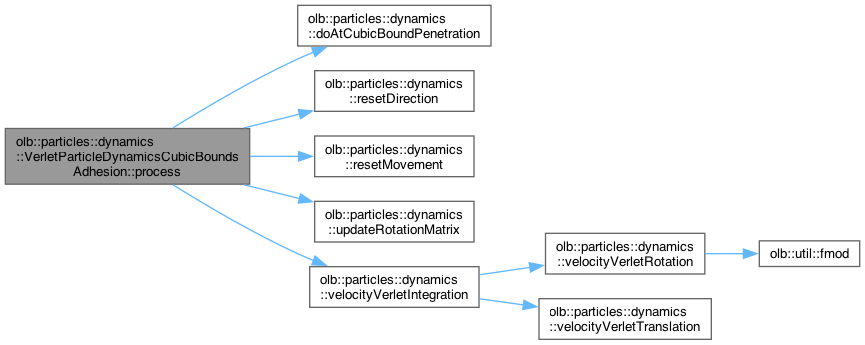
Procesisng step.
Implements olb::particles::dynamics::ParticleDynamics< T, PARTICLETYPE >.
Definition at line 457 of file particleDynamicsBase.hh.
References olb::particles::dynamics::doAtCubicBoundPenetration(), olb::particles::dynamics::resetDirection(), olb::particles::dynamics::resetMovement(), olb::particles::dynamics::updateRotationMatrix(), and olb::particles::dynamics::velocityVerletIntegration().
Here is the call graph for this function: