|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
#include <wallContact.h>
 Inheritance diagram for olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >: Collaboration diagram for olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >:
Inheritance diagram for olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >: Collaboration diagram for olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >:Public Member Functions | |
| WallContactArbitraryFromOverlapVolume () | |
| Constructor. | |
| WallContactArbitraryFromOverlapVolume (std::size_t particleID, unsigned wallID) | |
| Constructor. | |
| WallContactArbitraryFromOverlapVolume (const WallContactArbitraryFromOverlapVolume< T, D, CONVEX > &contact) | |
| Copy Constructor. | |
| WallContactArbitraryFromOverlapVolume (WallContactArbitraryFromOverlapVolume< T, D, CONVEX > &&contact) | |
| Move Constructor. | |
| constexpr const PhysR< T, D > & | getParticlePosition () const |
| Return particle position. | |
| constexpr const PhysR< T, D > & | getMin () const |
| Read access to min. | |
| constexpr const PhysR< T, D > & | getMax () const |
| Read access to max. | |
| constexpr const std::size_t & | getParticleID () const |
| Read access to particle ID. | |
| constexpr unsigned | getWallID () const |
| Read access to wall matreial. | |
| constexpr T | getDampingFactor () const |
| Read access to damping factor. | |
| constexpr const int & | getResponsibleRank () const |
| Read access to the responsible rank. | |
| constexpr void | setParticlePosition (const PhysR< T, D > &particlePosition) |
| Set particle position. | |
| constexpr void | setDampingFactor (const T dampingFactor) |
| Set damping factor for contact. | |
| constexpr void | setDampingFactorFromInitialVelocity (const T coefficientOfRestitution, const T initialRelativeVelocityMagnitude) |
| Set damping factor from the magnitude of the initial relative impact velocity in direction of contact normal and the wanted coefficient of restitution. | |
| constexpr void | setResponsibleRank (const int &rank) |
| Set processor that is responsible for contact treatment. | |
| constexpr void | resetMinMax () |
| Reset min and max to default values. | |
| constexpr void | updateMinMax (const PhysR< T, D > &positionInsideTheContact) |
| Update min and max with given position inside the contact. | |
| constexpr void | increaseMinMax (const Vector< T, D > &increaseBy) |
| Increase bounding box size. | |
| constexpr void | combineWith (WallContactArbitraryFromOverlapVolume< T, D, CONVEX > &contact) |
| Combining two contacts, if the particle IDs are the same. | |
| constexpr bool | isEmpty () const |
| Returns if contact holds data. | |
| constexpr bool | isNew () const |
| Returns if the contact is a new contact. | |
| constexpr void | isNew (const bool newContact) |
| Sets 'isNew'. | |
| constexpr bool | isParticlePositionUpdated () const |
| Returns if the particle position is up-to-date. | |
| constexpr void | setParticlePositionUpdated (bool updated) |
| WallContactArbitraryFromOverlapVolume< T, D, CONVEX > & | operator= (const WallContactArbitraryFromOverlapVolume< T, D, CONVEX > &contact) |
| Copy assignment. | |
| WallContactArbitraryFromOverlapVolume< T, D, CONVEX > & | operator= (WallContactArbitraryFromOverlapVolume< T, D, CONVEX > &&contact) |
| Move assignment. | |
| std::size_t | serialize (std::uint8_t *buffer) |
| Serialize contact data. | |
| std::size_t | deserialize (std::uint8_t *buffer) |
| Deserialize contact data and save in object. | |
| void | print () |
| Print relevant quantities. | |
| Public Member Functions inherited from olb::particles::contact::WallContact< D > | |
| const std::vector< unsigned int > | indicesDim ({0, 1}) |
| const std::vector< unsigned int > | indicesDim ({0, 1, 2}) |
Static Public Member Functions | |
| static constexpr std::size_t | getSerialSize () |
| Get serial size. | |
Additional Inherited Members | |
| Static Public Attributes inherited from olb::particles::contact::WallContact< D > | |
| static const std::vector< unsigned int > | indicesDim |
| static const std::vector< unsigned int > | indicesSingle |
Definition at line 57 of file wallContact.h.
| olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::WallContactArbitraryFromOverlapVolume | ( | ) |
Constructor.
Definition at line 35 of file wallContact.hh.
| olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::WallContactArbitraryFromOverlapVolume | ( | std::size_t | particleID, |
| unsigned | wallID ) |
Constructor.
Definition at line 42 of file wallContact.hh.
| olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::WallContactArbitraryFromOverlapVolume | ( | const WallContactArbitraryFromOverlapVolume< T, D, CONVEX > & | contact | ) |
Copy Constructor.
Definition at line 52 of file wallContact.hh.
References olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::getDampingFactor(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::getResponsibleRank(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::isNew(), and olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::isParticlePositionUpdated().
Here is the call graph for this function:| olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::WallContactArbitraryFromOverlapVolume | ( | WallContactArbitraryFromOverlapVolume< T, D, CONVEX > && | contact | ) |
Move Constructor.
Definition at line 68 of file wallContact.hh.
|
constexpr |
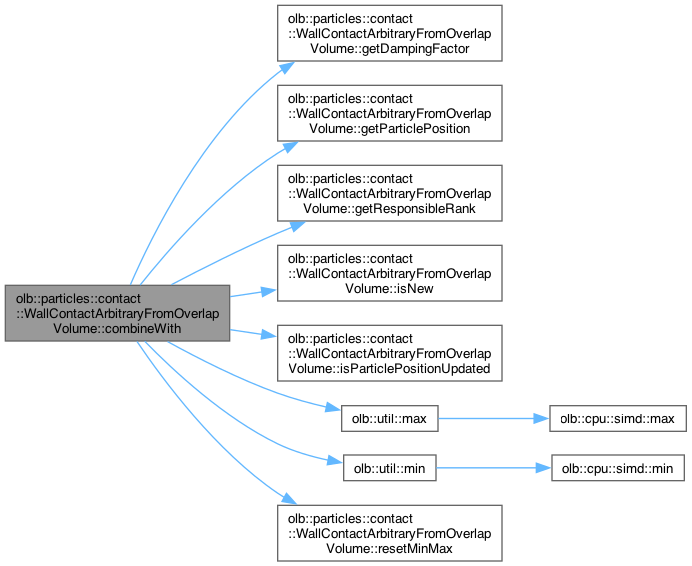
Combining two contacts, if the particle IDs are the same.
Definition at line 197 of file wallContact.hh.
References olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::getDampingFactor(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::getParticlePosition(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::getResponsibleRank(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::isNew(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::isParticlePositionUpdated(), olb::util::max(), olb::util::min(), and olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::resetMinMax().
Here is the call graph for this function:| std::size_t olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::deserialize | ( | std::uint8_t * | buffer | ) |
Deserialize contact data and save in object.
Definition at line 360 of file wallContact.hh.
|
constexpr |
Read access to damping factor.
Definition at line 144 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Read access to max.
Definition at line 137 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Read access to min.
Definition at line 130 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Read access to particle ID.
Definition at line 85 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Return particle position.
Definition at line 99 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Read access to the responsible rank.
Definition at line 123 of file wallContact.hh.
Here is the caller graph for this function:
|
inlinestaticconstexpr |
|
constexpr |
Read access to wall matreial.
Definition at line 92 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Increase bounding box size.
Definition at line 189 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Returns if contact holds data.
Definition at line 226 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Returns if the contact is a new contact.
Definition at line 238 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Sets 'isNew'.
Definition at line 244 of file wallContact.hh.
|
constexpr |
Returns if the particle position is up-to-date.
Definition at line 252 of file wallContact.hh.
Here is the caller graph for this function:| WallContactArbitraryFromOverlapVolume< T, D, CONVEX > & olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::operator= | ( | const WallContactArbitraryFromOverlapVolume< T, D, CONVEX > & | contact | ) |
Copy assignment.
Definition at line 268 of file wallContact.hh.
References olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::getDampingFactor(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::getResponsibleRank(), olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::isNew(), and olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::isParticlePositionUpdated().
Here is the call graph for this function:| WallContactArbitraryFromOverlapVolume< T, D, CONVEX > & olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::operator= | ( | WallContactArbitraryFromOverlapVolume< T, D, CONVEX > && | contact | ) |
Move assignment.
Definition at line 286 of file wallContact.hh.
| void olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::print | ( | ) |
Print relevant quantities.
Definition at line 393 of file wallContact.hh.
References olb::singleton::MpiManager::getRank(), olb::singleton::mpi(), and olb::OstreamManager::setMultiOutput().
Here is the call graph for this function:
|
constexpr |
Reset min and max to default values.
Definition at line 169 of file wallContact.hh.
Here is the caller graph for this function:| std::size_t olb::particles::contact::WallContactArbitraryFromOverlapVolume< T, D, CONVEX >::serialize | ( | std::uint8_t * | buffer | ) |
Serialize contact data.
Definition at line 327 of file wallContact.hh.
|
constexpr |
Set damping factor for contact.
Definition at line 151 of file wallContact.hh.
|
constexpr |
Set damping factor from the magnitude of the initial relative impact velocity in direction of contact normal and the wanted coefficient of restitution.
Definition at line 158 of file wallContact.hh.
References olb::particles::contact::evalDampingFactor().
Here is the call graph for this function:
|
constexpr |
Set particle position.
Definition at line 106 of file wallContact.hh.
|
constexpr |
Definition at line 260 of file wallContact.hh.
|
constexpr |
Set processor that is responsible for contact treatment.
Definition at line 115 of file wallContact.hh.
Here is the caller graph for this function:
|
constexpr |
Update min and max with given position inside the contact.
Definition at line 180 of file wallContact.hh.
References olb::particles::contact::updateMinMax().
Here is the call graph for this function: Here is the caller graph for this function: