|
OpenLB 1.7
|
Loading...
Searching...
No Matches
|
OpenLB 1.7
|
#include <particleSystem3D.h>
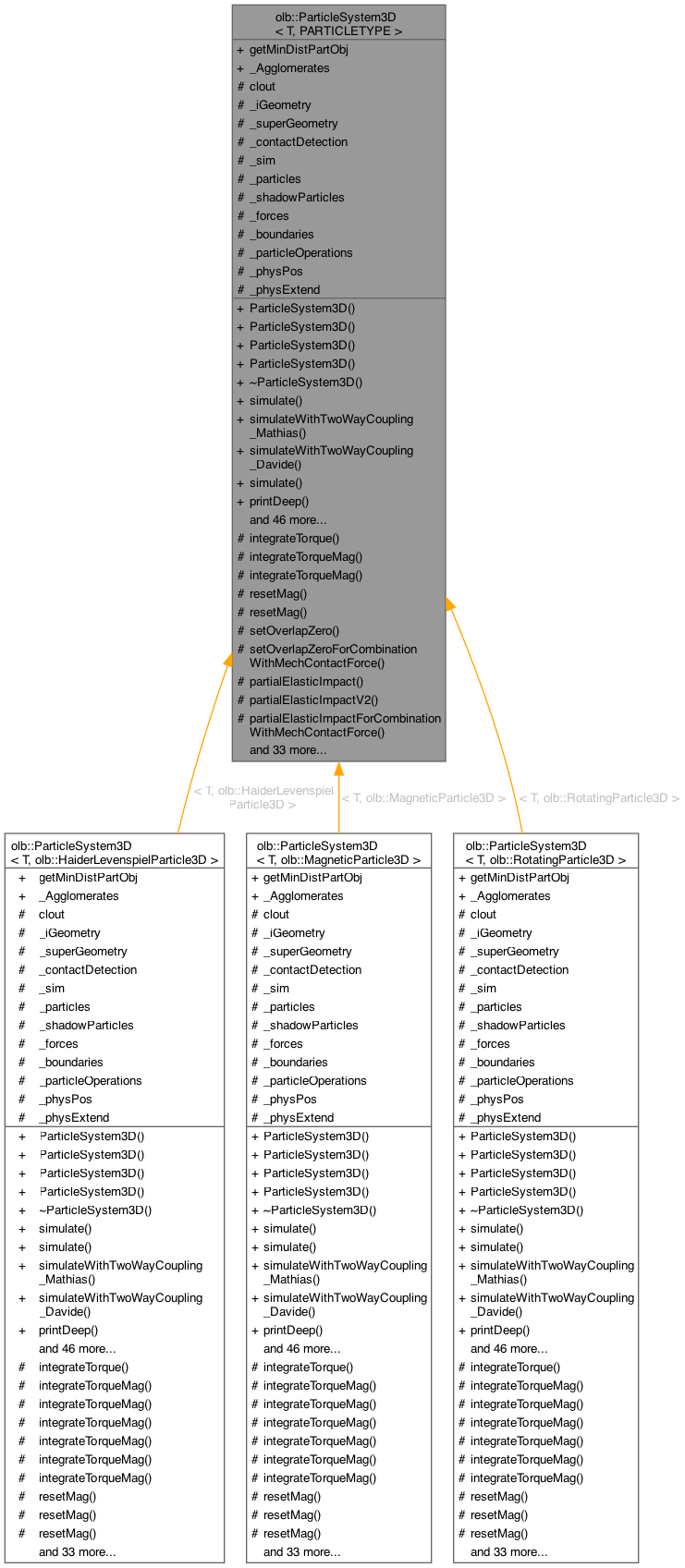
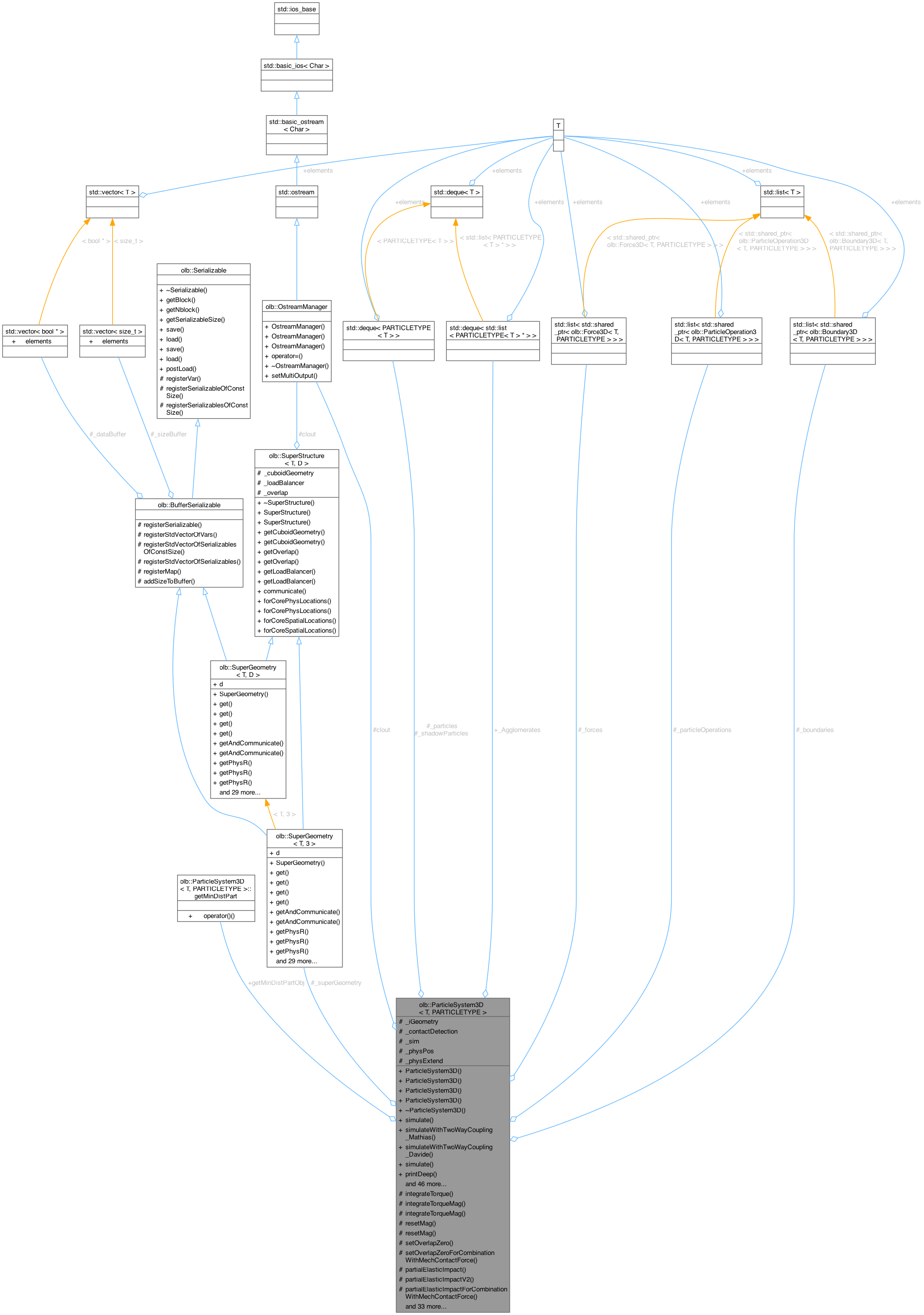
 Inheritance diagram for olb::ParticleSystem3D< T, PARTICLETYPE >: Collaboration diagram for olb::ParticleSystem3D< T, PARTICLETYPE >:
Inheritance diagram for olb::ParticleSystem3D< T, PARTICLETYPE >: Collaboration diagram for olb::ParticleSystem3D< T, PARTICLETYPE >:Classes | |
| struct | getMinDistPart |
| Sorts the vector of neighbor Particles by increasing distance. More... | |
Public Member Functions | |
| ParticleSystem3D ()=default | |
| Default constructor for ParticleSystem. | |
| ParticleSystem3D (int iGeometry, SuperGeometry< T, 3 > &superGeometry) | |
| Constructor for ParticleSystem. | |
| ParticleSystem3D (const ParticleSystem3D< T, PARTICLETYPE > &pS) | |
| Copy constructor for ParticleSystem. | |
| ParticleSystem3D (ParticleSystem3D< T, PARTICLETYPE > &&pS) | |
| Move constructor for ParticleSystem. | |
| virtual | ~ParticleSystem3D () |
| Destructor for ParticleSystem. | |
| virtual void | simulate (T deltatime, bool scale=false) |
| virtual void | simulateWithTwoWayCoupling_Mathias (T dT, ForwardCouplingModel< T, PARTICLETYPE > &forwardCoupling, BackCouplingModel< T, PARTICLETYPE > &backCoupling, int material, int subSteps, bool scale) |
| virtual void | simulateWithTwoWayCoupling_Davide (T dT, ForwardCouplingModel< T, PARTICLETYPE > &forwardCoupling, BackCouplingModel< T, PARTICLETYPE > &backCoupling, int material, int subSteps, bool scale) |
| virtual void | simulate (T deltatime, std::set< int > sActivityOfParticle, bool scale=false) |
| void | printDeep (std::string message="") |
| int | size () |
| Get number of particles in ParticleSystem. | |
| int | sizeInclShadow () const |
| Get number of particles including shadow particles in ParticleSystem. | |
| int | numOfActiveParticles () |
| Get number of active particles in ParticleSystem. | |
| int | numOfForces () |
| Get number of linked forces in ParticleSystem. | |
| int | countMaterial (int mat=1) |
| Get number of particles in vicinity of material number mat. | |
| void | addParticle (PARTICLETYPE< T > &p) |
| Add a particle to ParticleSystem. | |
| void | clearParticles () |
| Removes all particles from system. | |
| void | addForce (std::shared_ptr< Force3D< T, PARTICLETYPE > > pF) |
| Add a force to ParticleSystem. | |
| void | addBoundary (std::shared_ptr< Boundary3D< T, PARTICLETYPE > > pB) |
| Add a boundary to ParticleSystem. | |
| void | addParticleOperation (std::shared_ptr< ParticleOperation3D< T, PARTICLETYPE > > pO) |
| Add an operation to ParticleSystem. | |
| PARTICLETYPE< T > & | operator[] (const int i) |
| Get reference to a particle in the ParticleSystem runs over all particles incl. | |
| const PARTICLETYPE< T > & | operator[] (const int i) const |
| template<typename DESCRIPTOR > | |
| void | setVelToFluidVel (SuperLatticeInterpPhysVelocity3D< T, DESCRIPTOR > &) |
| Set velocity of all particles to fluid velocity. | |
| void | setVelToAnalyticalVel (AnalyticalConst3D< T, T > &) |
| Set particle velocity to analytical velocity (e.g. as initial condition. | |
| void | setPosExt (std::vector< T > physPos, std::vector< T > physExtend) |
| Set global coordinates and extends of Particlesystem (SI units) | |
| const std::vector< T > & | getPhysPos () |
| Get global coordinates and extends of Particlesystem (SI units) | |
| const std::vector< T > & | getPhysExtend () |
| void | saveToFile (std::string name) |
| Save particle positions to file. | |
| void | computeForce () |
| Compute all forces on particles. | |
| void | computeForce (std::set< int > sActivityOfParticle) |
| void | setStoredValues () |
| Stores old particle positions - is used in ..._ActExt. | |
| void | getMinDistParticle (std::vector< std::pair< size_t, T > > ret_matches) |
| void | computeBoundary () |
| Compute boundary contact. | |
| void | computeParticleOperation () |
| Compute operations on particles. | |
| void | setContactDetection (ContactDetection< T, PARTICLETYPE > &contactDetection) |
| Set boundary detection algorithm (for future features) | |
| ContactDetection< T, PARTICLETYPE > * | getContactDetection () |
| void | explicitEuler (T dT, bool scale=false) |
| Integration method: explicit Euler if scale = true, velocity is scaled to maximal velocity maximal velocity = _superGeometry.getCuboidGeometry().getMaxDeltaR()/dT. | |
| void | explicitEuler (T dT, std::set< int > sActivityOfParticle, bool scale=false) |
| bool | executeForwardCoupling (ForwardCouplingModel< T, PARTICLETYPE > &forwardCoupling) |
| bool | executeBackwardCoupling (BackCouplingModel< T, PARTICLETYPE > &backwardCoupling, int material, int subSteps=1) |
| ContactDetection< T, PARTICLETYPE > * | getDetection () |
| int | getIGeometry () |
| std::deque< PARTICLETYPE< T > * > | getParticlesPointer () |
| returns deque of pointer to particles (not shadow particles) contained in a particleSystem3D | |
| std::deque< PARTICLETYPE< T > * > | getAllParticlesPointer () |
| returns deque of pointer to all particles (incl. | |
| std::deque< PARTICLETYPE< T > * > | getShadowParticlesPointer () |
| returns deque of pointer to all shadow particles contained in a particleSystem3D | |
| std::deque< PARTICLETYPE< T > > & | getParticles () |
| returns deque of particles (no shadow particles) contained in a particleSystem3D | |
| void | removeParticle (typename std::deque< PARTICLETYPE< T > >::iterator &p) |
| std::list< std::shared_ptr< Force3D< T, PARTICLETYPE > > > | getForcesPointer () |
| returns shared pointer of forces | |
| void | computeForce () |
| void | computeForce (std::set< int > sActivityOfParticle) |
| void | explicitEuler (double dT, bool scale) |
| void | explicitEuler (double dT, std::set< int > sActivityOfParticle, bool scale) |
| void | explicitEuler (double dT, bool scale) |
| void | explicitEuler (double dT, std::set< int > sActivityOfParticle, bool scale) |
| void | computeForce () |
| void | computeForce (std::set< int > sActivityOfParticle) |
Public Attributes | |
| struct olb::ParticleSystem3D::getMinDistPart | getMinDistPartObj |
| std::deque< std::list< PARTICLETYPE< T > * > > | _Agglomerates |
| Deque of Lists of agglomerated particles. | |
Protected Member Functions | |
| void | integrateTorque (T dT) |
| void | integrateTorqueMag (T dT) |
| void | integrateTorqueMag (T dT, std::set< int > sActivityOfParticle) |
| void | resetMag () |
| void | resetMag (std::set< int > sActivityOfParticle) |
| void | setOverlapZero () |
| Collision models: Todo: enable for parallel mode Resets existing particle overlaps in the event of a collision. | |
| void | setOverlapZeroForCombinationWithMechContactForce () |
| For the combined use of setOverlapZero() and a mechanic contact force. | |
| void | partialElasticImpact (T restitutionCoeff) |
| Resets existing particle overlaps in the event of a collision and applies the physics of an partial elastic impact. | |
| void | partialElasticImpactV2 (T restitutionCoeff) |
| Applies the physics of an partial elastic impact while multiple particle overlapping only to the particles with the least separation distance. | |
| void | partialElasticImpactForCombinationWithMechContactForce (T restitutionCoeff) |
| For the combined use of partialElasticImpact() and a mechanic contact force. | |
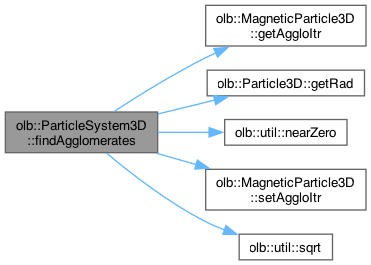
| void | findAgglomerates () |
| Detects and manages particle agglomerates. | |
| void | initAggloParticles () |
| Adds new generated particles to the list of non agglomerated Particles. | |
| void | addShadowParticle (PARTICLETYPE< T > &p) |
| void | velocityVerlet1 (T dT) |
| Integration methods, each need a special template particle. | |
| void | velocityVerlet2 (T dT) |
| void | rungeKutta4_1 (T dt) |
| void | rungeKutta4_2 (T dt) |
| void | rungeKutta4_3 (T dt) |
| void | rungeKutta4_4 (T dt) |
| void | rungeKutta4 (T dT) |
| void | updateParticleDistribution () |
| void | integrateTorqueMag (double dT) |
| void | integrateTorqueMag (double dT, std::set< int > sActivityOfParticle) |
| void | resetMag () |
| void | resetMag (std::set< int > sActivityOfParticle) |
| void | setOverlapZero () |
| void | setOverlapZeroForCombinationWithMechContactForce () |
| void | partialElasticImpact (double restitutionCoeff) |
| void | partialElasticImpactV2 (double restitutionCoeff) |
| void | partialElasticImpactForCombinationWithMechContactForce (double restitutionCoeff) |
| void | findAgglomerates () |
| void | initAggloParticles () |
| void | resetMag () |
| void | resetMag (std::set< int > sActivityOfParticle) |
| void | integrateTorqueMag (double dT) |
| void | integrateTorqueMag (double dT, std::set< int > sActivityOfParticle) |
| void | setOverlapZero () |
| void | setOverlapZeroForCombinationWithMechContactForce () |
| void | partialElasticImpact (double restitutionCoeff) |
| void | partialElasticImpactV2 (double restitutionCoeff) |
| void | partialElasticImpactForCombinationWithMechContactForce (double restitutionCoeff) |
| void | findAgglomerates () |
| void | initAggloParticles () |
Protected Attributes | |
| OstreamManager | clout |
| int | _iGeometry = -1 |
| SuperGeometry< T, 3 > & | _superGeometry |
| ContactDetection< T, PARTICLETYPE > * | _contactDetection |
| SimulateParticles< T, PARTICLETYPE > | _sim |
| std::deque< PARTICLETYPE< T > > | _particles |
| std::deque< PARTICLETYPE< T > > | _shadowParticles |
| std::list< std::shared_ptr< Force3D< T, PARTICLETYPE > > > | _forces |
| std::list< std::shared_ptr< Boundary3D< T, PARTICLETYPE > > > | _boundaries |
| std::list< std::shared_ptr< ParticleOperation3D< T, PARTICLETYPE > > > | _particleOperations |
| std::vector< T > | _physPos |
| std::vector< T > | _physExtend |
Friends | |
| class | SuperParticleSystem3D< T, PARTICLETYPE > |
| Particle-Fluid interaction for subgrid scale particles. | |
| class | SuperParticleSysVtuWriter< T, PARTICLETYPE > |
| class | SuperParticleSysVtuWriterMag< T > |
| class | SimulateParticles< T, PARTICLETYPE > |
Definition at line 73 of file particleSystem3D.h.
|
default |
Default constructor for ParticleSystem.
| olb::ParticleSystem3D< T, PARTICLETYPE >::ParticleSystem3D | ( | int | iGeometry, |
| SuperGeometry< T, 3 > & | superGeometry ) |
Constructor for ParticleSystem.
Definition at line 51 of file particleSystem3D.hh.
| olb::ParticleSystem3D< T, PARTICLETYPE >::ParticleSystem3D | ( | const ParticleSystem3D< T, PARTICLETYPE > & | pS | ) |
Copy constructor for ParticleSystem.
Definition at line 62 of file particleSystem3D.hh.
References olb::ParticleSystem3D< T, PARTICLETYPE >::_forces, and olb::ParticleSystem3D< T, PARTICLETYPE >::_particles.
| olb::ParticleSystem3D< T, PARTICLETYPE >::ParticleSystem3D | ( | ParticleSystem3D< T, PARTICLETYPE > && | pS | ) |
Move constructor for ParticleSystem.
Definition at line 77 of file particleSystem3D.hh.
|
inlinevirtual |
Destructor for ParticleSystem.
Definition at line 89 of file particleSystem3D.h.
References olb::ParticleSystem3D< T, PARTICLETYPE >::_contactDetection.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::addBoundary | ( | std::shared_ptr< Boundary3D< T, PARTICLETYPE > > | pB | ) |
Add a boundary to ParticleSystem.
Definition at line 246 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::addForce | ( | std::shared_ptr< Force3D< T, PARTICLETYPE > > | pF | ) |
Add a force to ParticleSystem.
Definition at line 239 of file particleSystem3D.hh.
Here is the caller graph for this function:| void olb::ParticleSystem3D< T, PARTICLETYPE >::addParticle | ( | PARTICLETYPE< T > & | p | ) |
Add a particle to ParticleSystem.
Definition at line 221 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::addParticleOperation | ( | std::shared_ptr< ParticleOperation3D< T, PARTICLETYPE > > | pO | ) |
Add an operation to ParticleSystem.
Definition at line 253 of file particleSystem3D.hh.
|
protected |
Definition at line 233 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::clearParticles | ( | ) |
Removes all particles from system.
Definition at line 227 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::computeBoundary | ( | ) |
Compute boundary contact.
Definition at line 312 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::computeForce | ( | ) |
Compute all forces on particles.
Definition at line 284 of file particleSystem3D.hh.
Here is the caller graph for this function:| void olb::ParticleSystem3D< double, MagneticParticle3D >::computeForce | ( | ) |
| void olb::ParticleSystem3D< double, MagneticParticle3D >::computeForce | ( | ) |
Definition at line 1125 of file particleSystem3D.hh.
|
inline |
Definition at line 155 of file particleSystem3D.h.
References olb::ParticleSystem3D< T, PARTICLETYPE >::computeForce().
Here is the call graph for this function:| void olb::ParticleSystem3D< double, MagneticParticle3D >::computeForce | ( | std::set< int > | sActivityOfParticle | ) |
| void olb::ParticleSystem3D< double, MagneticParticle3D >::computeForce | ( | std::set< int > | sActivityOfParticle | ) |
Definition at line 1141 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::computeParticleOperation | ( | ) |
Compute operations on particles.
Definition at line 325 of file particleSystem3D.hh.
| int olb::ParticleSystem3D< T, PARTICLETYPE >::countMaterial | ( | int | mat = 1 | ) |
Get number of particles in vicinity of material number mat.
Definition at line 369 of file particleSystem3D.hh.
References olb::BlockGeometry< T, D >::get().
Here is the call graph for this function:| bool olb::ParticleSystem3D< T, PARTICLETYPE >::executeBackwardCoupling | ( | BackCouplingModel< T, PARTICLETYPE > & | backwardCoupling, |
| int | material, | ||
| int | subSteps = 1 ) |
Definition at line 409 of file particleSystem3D.hh.
| bool olb::ParticleSystem3D< T, PARTICLETYPE >::executeForwardCoupling | ( | ForwardCouplingModel< T, PARTICLETYPE > & | forwardCoupling | ) |
Definition at line 395 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< double, MagneticParticle3D >::explicitEuler | ( | double | dT, |
| bool | scale ) |
| void olb::ParticleSystem3D< double, MagneticParticle3D >::explicitEuler | ( | double | dT, |
| bool | scale ) |
Definition at line 477 of file particleSystem3D.hh.
References olb::util::fabs(), olb::util::max(), and olb::util::nearZero().
Here is the call graph for this function:| void olb::ParticleSystem3D< double, MagneticParticle3D >::explicitEuler | ( | double | dT, |
| std::set< int > | sActivityOfParticle, | ||
| bool | scale ) |
| void olb::ParticleSystem3D< double, MagneticParticle3D >::explicitEuler | ( | double | dT, |
| std::set< int > | sActivityOfParticle, | ||
| bool | scale ) |
Definition at line 537 of file particleSystem3D.hh.
References olb::util::fabs(), olb::util::max(), and olb::util::nearZero().
Here is the call graph for this function:| void olb::ParticleSystem3D< T, PARTICLETYPE >::explicitEuler | ( | T | dT, |
| bool | scale = false ) |
Integration method: explicit Euler if scale = true, velocity is scaled to maximal velocity maximal velocity = _superGeometry.getCuboidGeometry().getMaxDeltaR()/dT.
Definition at line 423 of file particleSystem3D.hh.
References olb::util::fabs(), olb::util::max(), and olb::util::nearZero().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Definition at line 203 of file particleSystem3D.h.
References olb::ParticleSystem3D< T, PARTICLETYPE >::explicitEuler().
Here is the call graph for this function:
|
inlineprotected |
Detects and manages particle agglomerates.
Definition at line 268 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1862 of file particleSystem3D.hh.
References olb::MagneticParticle3D< T >::getAggloItr(), olb::Particle3D< T >::getRad(), olb::util::nearZero(), olb::MagneticParticle3D< T >::setAggloItr(), and olb::util::sqrt().
Here is the call graph for this function:| std::deque< PARTICLETYPE< T > * > olb::ParticleSystem3D< T, PARTICLETYPE >::getAllParticlesPointer | ( | ) |
returns deque of pointer to all particles (incl.
shadow particles) contained in a particleSystem3D
Definition at line 935 of file particleSystem3D.hh.
| ContactDetection< T, PARTICLETYPE > * olb::ParticleSystem3D< T, PARTICLETYPE >::getContactDetection | ( | ) |
|
inline |
Definition at line 210 of file particleSystem3D.h.
References olb::ParticleSystem3D< T, PARTICLETYPE >::_contactDetection.
Here is the caller graph for this function:| std::list< std::shared_ptr< Force3D< T, PARTICLETYPE > > > olb::ParticleSystem3D< T, PARTICLETYPE >::getForcesPointer | ( | ) |
returns shared pointer of forces
Definition at line 929 of file particleSystem3D.hh.
|
inline |
Definition at line 215 of file particleSystem3D.h.
References olb::ParticleSystem3D< T, PARTICLETYPE >::_iGeometry.
Here is the caller graph for this function:| void olb::ParticleSystem3D< T, PARTICLETYPE >::getMinDistParticle | ( | std::vector< std::pair< size_t, T > > | ret_matches | ) |
Definition at line 1470 of file particleSystem3D.hh.
|
inline |
returns deque of particles (no shadow particles) contained in a particleSystem3D
Definition at line 231 of file particleSystem3D.h.
References olb::ParticleSystem3D< T, PARTICLETYPE >::_particles.
| std::deque< PARTICLETYPE< T > * > olb::ParticleSystem3D< T, PARTICLETYPE >::getParticlesPointer | ( | ) |
returns deque of pointer to particles (not shadow particles) contained in a particleSystem3D
Definition at line 917 of file particleSystem3D.hh.
| const std::vector< T > & olb::ParticleSystem3D< T, PARTICLETYPE >::getPhysExtend | ( | ) |
Definition at line 128 of file particleSystem3D.hh.
| const std::vector< T > & olb::ParticleSystem3D< T, PARTICLETYPE >::getPhysPos | ( | ) |
Get global coordinates and extends of Particlesystem (SI units)
Definition at line 122 of file particleSystem3D.hh.
| std::deque< PARTICLETYPE< T > * > olb::ParticleSystem3D< T, PARTICLETYPE >::getShadowParticlesPointer | ( | ) |
returns deque of pointer to all shadow particles contained in a particleSystem3D
Definition at line 950 of file particleSystem3D.hh.
|
inlineprotected |
Adds new generated particles to the list of non agglomerated Particles.
Definition at line 270 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1989 of file particleSystem3D.hh.
|
protected |
|
protected |
|
protected |
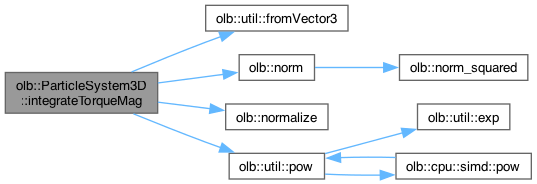
Definition at line 1211 of file particleSystem3D.hh.
References olb::util::fromVector3(), olb::norm(), olb::normalize(), and olb::util::pow().
Here is the call graph for this function:
|
protected |
|
protected |
Definition at line 1246 of file particleSystem3D.hh.
References olb::util::fromVector3(), olb::norm(), olb::normalize(), and olb::util::pow().
Here is the call graph for this function:
|
inlineprotected |
Definition at line 246 of file particleSystem3D.h.
|
inlineprotected |
Definition at line 248 of file particleSystem3D.h.
| int olb::ParticleSystem3D< T, PARTICLETYPE >::numOfActiveParticles | ( | ) |
Get number of active particles in ParticleSystem.
Definition at line 183 of file particleSystem3D.hh.
| int olb::ParticleSystem3D< T, PARTICLETYPE >::numOfForces | ( | ) |
Get number of linked forces in ParticleSystem.
Definition at line 215 of file particleSystem3D.hh.
| PARTICLETYPE< T > & olb::ParticleSystem3D< T, PARTICLETYPE >::operator[] | ( | const int | i | ) |
Get reference to a particle in the ParticleSystem runs over all particles incl.
shadow particles
Definition at line 134 of file particleSystem3D.hh.
| const PARTICLETYPE< T > & olb::ParticleSystem3D< T, PARTICLETYPE >::operator[] | ( | const int | i | ) | const |
Definition at line 152 of file particleSystem3D.hh.
|
protected |
|
protected |
Definition at line 1476 of file particleSystem3D.hh.
References olb::Particle3D< T >::getMass(), olb::Particle3D< T >::getPos(), olb::Particle3D< T >::getRad(), olb::MagneticParticle3D< T >::getSActivity(), olb::Particle3D< T >::getVel(), olb::util::nearZero(), olb::normalize(), olb::MagneticParticle3D< T >::setSActivity(), and olb::util::sqrt().
Here is the call graph for this function:
|
inlineprotected |
Resets existing particle overlaps in the event of a collision and applies the physics of an partial elastic impact.
Definition at line 260 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1736 of file particleSystem3D.hh.
References olb::Particle3D< T >::getMass(), olb::Particle3D< T >::getPos(), olb::Particle3D< T >::getRad(), olb::MagneticParticle3D< T >::getSActivity(), olb::Particle3D< T >::getVel(), olb::util::nearZero(), olb::normalize(), olb::MagneticParticle3D< T >::setSActivity(), and olb::util::sqrt().
Here is the call graph for this function:
|
inlineprotected |
For the combined use of partialElasticImpact() and a mechanic contact force.
Definition at line 265 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1597 of file particleSystem3D.hh.
References olb::Particle3D< T >::getMass(), olb::Particle3D< T >::getPos(), olb::Particle3D< T >::getRad(), olb::MagneticParticle3D< T >::getSActivity(), olb::Particle3D< T >::getVel(), olb::util::nearZero(), olb::normalize(), olb::MagneticParticle3D< T >::setSActivity(), and olb::util::sqrt().
Here is the call graph for this function:
|
inlineprotected |
Applies the physics of an partial elastic impact while multiple particle overlapping only to the particles with the least separation distance.
Definition at line 263 of file particleSystem3D.h.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::printDeep | ( | std::string | message = "" | ) |
Definition at line 98 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::removeParticle | ( | typename std::deque< PARTICLETYPE< T > >::iterator & | p | ) |
|
inlineprotected |
Definition at line 249 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1080 of file particleSystem3D.hh.
|
inlineprotected |
Definition at line 251 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1096 of file particleSystem3D.hh.
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
| void olb::ParticleSystem3D< T, PARTICLETYPE >::saveToFile | ( | std::string | name | ) |
Save particle positions to file.
Definition at line 961 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::setContactDetection | ( | ContactDetection< T, PARTICLETYPE > & | contactDetection | ) |
Set boundary detection algorithm (for future features)
Definition at line 107 of file particleSystem3D.hh.
|
inlineprotected |
Collision models: Todo: enable for parallel mode Resets existing particle overlaps in the event of a collision.
Definition at line 255 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1310 of file particleSystem3D.hh.
References olb::Particle3D< T >::getPos(), olb::Particle3D< T >::getRad(), olb::MagneticParticle3D< T >::getSActivity(), olb::util::nearZero(), olb::normalize(), olb::MagneticParticle3D< T >::setSActivity(), and olb::util::sqrt().
Here is the call graph for this function:
|
inlineprotected |
For the combined use of setOverlapZero() and a mechanic contact force.
Definition at line 257 of file particleSystem3D.h.
|
protected |
|
protected |
Definition at line 1400 of file particleSystem3D.hh.
References olb::Particle3D< T >::getPos(), olb::Particle3D< T >::getRad(), olb::MagneticParticle3D< T >::getSActivity(), olb::util::nearZero(), olb::normalize(), and olb::util::sqrt().
Here is the call graph for this function:| void olb::ParticleSystem3D< T, PARTICLETYPE >::setPosExt | ( | std::vector< T > | physPos, |
| std::vector< T > | physExtend ) |
Set global coordinates and extends of Particlesystem (SI units)
Definition at line 114 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::setStoredValues | ( | ) |
Stores old particle positions - is used in ..._ActExt.
Definition at line 1296 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::setVelToAnalyticalVel | ( | AnalyticalConst3D< T, T > & | aVel | ) |
Set particle velocity to analytical velocity (e.g. as initial condition.
Definition at line 272 of file particleSystem3D.hh.
| void olb::ParticleSystem3D< T, PARTICLETYPE >::setVelToFluidVel | ( | SuperLatticeInterpPhysVelocity3D< T, DESCRIPTOR > & | fVel | ) |
Set velocity of all particles to fluid velocity.
Definition at line 261 of file particleSystem3D.hh.
|
virtual |
Definition at line 338 of file particleSystem3D.hh.
|
virtual |
Definition at line 363 of file particleSystem3D.hh.
|
virtual |
Definition at line 353 of file particleSystem3D.hh.
|
virtual |
Definition at line 344 of file particleSystem3D.hh.
| int olb::ParticleSystem3D< T, PARTICLETYPE >::size | ( | ) |
Get number of particles in ParticleSystem.
Definition at line 171 of file particleSystem3D.hh.
| int olb::ParticleSystem3D< T, PARTICLETYPE >::sizeInclShadow | ( | ) | const |
Get number of particles including shadow particles in ParticleSystem.
Definition at line 177 of file particleSystem3D.hh.
|
protected |
|
protected |
Integration methods, each need a special template particle.
Definition at line 759 of file particleSystem3D.hh.
References olb::util::pow().
Here is the call graph for this function:
|
protected |
Definition at line 774 of file particleSystem3D.hh.
|
friend |
Definition at line 180 of file particleSystem3D.h.
|
friend |
Particle-Fluid interaction for subgrid scale particles.
Definition at line 180 of file particleSystem3D.h.
|
friend |
Definition at line 180 of file particleSystem3D.h.
|
friend |
Definition at line 180 of file particleSystem3D.h.
| std::deque<std::list<PARTICLETYPE<T>*> > olb::ParticleSystem3D< T, PARTICLETYPE >::_Agglomerates |
Deque of Lists of agglomerated particles.
Definition at line 242 of file particleSystem3D.h.
|
protected |
Definition at line 284 of file particleSystem3D.h.
|
protected |
Definition at line 277 of file particleSystem3D.h.
|
protected |
Definition at line 283 of file particleSystem3D.h.
|
protected |
Definition at line 275 of file particleSystem3D.h.
|
protected |
Definition at line 285 of file particleSystem3D.h.
|
protected |
Definition at line 280 of file particleSystem3D.h.
|
protected |
Definition at line 288 of file particleSystem3D.h.
|
protected |
Definition at line 287 of file particleSystem3D.h.
|
protected |
Definition at line 282 of file particleSystem3D.h.
|
protected |
Definition at line 278 of file particleSystem3D.h.
|
protected |
Definition at line 276 of file particleSystem3D.h.
|
mutableprotected |
Definition at line 274 of file particleSystem3D.h.
| struct olb::ParticleSystem3D::getMinDistPart olb::ParticleSystem3D< T, PARTICLETYPE >::getMinDistPartObj |